可由单一固定装置固定位置的定位臂的制作方法
- 国知局
- 2024-07-08 11:07:27
本发明涉及可由所谓旋钮及制动器的单一固定装置同时固定多个旋转臂、调节轴等的定位臂。
背景技术:
1、定位臂是调节机械装置等的位置的机械结构。定位臂通常由多个旋转臂、轴、连杆等构成,但存在为了固定各个结构和结构之间,需要分别独立固定的临界点。
2、本发明要揭示通过单一固定装置可同时执行多个结构之间的固定的技术。以下,揭示相关的先行专利文献。
3、专利文献001涉及中空型选择顺应性装配机器人,其将第一轴、第二轴构成为中空型,可提供配线的容易性,通过改善将工具结合的驱动轴的结构,提出工作时无尘并从根本上可阻断来自外部的水分流入的结构,由此提供在各种饮料制造工艺中具有ip65保护等级以上的性能,在卫生方面上可安全使用的中空型选择顺应性装配机器人。本专利文献涉及中空型选择顺应性装配机器人,其包括:基座,固定在机体;第一臂,与第一驱动单元的第一轴结合,上述第一驱动单元包括借助内置于基座的正反驱动的第一驱动马达来旋转的中空型的第一轴;第二臂,设置在驱动上述第一臂的第一轴的相反侧,与中空型的第二轴结合,上述第二轴位于与第一轴相同的轴上,并借助设置于基座上端的正反驱动的第二驱动马达来旋转;第三驱动单元,内置于上述第二臂,包括使下端设置工具的驱动轴旋转的正反驱动的第三驱动马达;以及第四驱动单元,包括使驱动轴升降的正反驱动的第四驱动马达;上述驱动轴由借助第四驱动单元升降的滚珠花键结构的上部件和环杆结构的下部件分割构成,通过作为连接单元的耦合器相互连接构成。
4、专利文献002涉及选择顺应性装配机器人用驱动轴传动装置,根据本发明的选择顺应性装配机器人用驱动轴传动装置是选择顺应性装配机器人用驱动轴传动装置,其包括:驱动单元,向驱动齿轮施加旋转力;驱动轴,设置选择顺应性装配机器人的工作工具;以及剪断齿轮,设置于上述驱动轴,与驱动齿轮啮合,上述剪断齿轮由主齿轮和支撑齿轮构成,在上述主齿轮和支撑齿轮之间啮合驱动齿轮。
5、专利文献003涉及自动螺栓紧固装置,其利用双臂选择顺应性装配机器人,分开同时进行从螺栓进料器中拾取螺栓的工艺和将螺栓紧固于被加工物的工艺,由此不仅稳定地紧固螺栓而且可大幅缩短紧固螺栓时所需的时间,该自动螺栓紧固装置包括:本体框架;下部臂,沿左右方向可旋转地设置在上述本体框架;夹具,设置在上述下部臂的前端部,从螺栓进料器中拾取螺栓;上部臂,在上述下部臂的上侧,沿左右方向可旋转地设置在上述本体框架;螺栓紧固器,可升降地设置在上述上部臂的前端部,以真空吸附的状态借助上述上部臂将被上述夹具拾取的螺栓移动至组装流水线之后,将螺栓紧固于位于组装流水线的被加工物;分开同时进行利用夹具从螺栓进料器中拾取螺栓的工艺和利用螺栓紧固器将螺栓紧固于被加工物的工艺。
6、专利文献004涉及机器处理装置,包括:框架;第一选择顺应性装配机械臂,在肩部轴连接在上述框架,具有第一上侧臂、第一前方臂及相互可旋转地串联连接的至少一个基板支持物;第二选择顺应性装配机械臂,在肩部轴连接在上述框架,上述第一选择顺应性装配机械臂及第二选择顺应性装配机械臂的肩部旋转轴实质上一致,第二选择顺应性装配机械臂具有第二上侧臂、第二前方臂及相互可旋转地串联连接的至少一个基板支持物;驱动部件,连接在上述框架,结合在上述第一选择顺应性装配机械臂及第二选择顺应性装配机械臂,上述驱动部件单独延伸第一选择顺应性装配机械臂及第二选择顺应性装配机械臂而使其旋转,上述第一选择顺应性装配机械臂的伸张轴,在第一选择顺应性装配机械臂或第二选择顺应性装配机械臂中的至少一个,在各个位置上实际上与上述第二选择顺应性装配机械臂的伸张轴形成角。
7、专利文献005涉及牙科植牙手术机器人系统。根据本发明的一实施例,提供一种牙科植牙手术机器人系统,其特征在于,包括:植牙手术机器人,包括由多个连杆构成的驱动臂、与上述驱动臂连接的操纵器、安装在上述操纵器并安装对用于植牙手术的孔进行穿孔的钻头的手柄;位置检测部,实时检测患者的植牙手术部位的立体影像数据和上述手柄的位置;以及控制部,将上述位置检测部中提供的上述立体影像数据和已输入的患者的植牙手术部位的ct影像数据进行坐标匹配并重叠之后,控制上述植牙手术机器人,使得上述手柄的钻头在植牙手术部位可穿孔上述孔。根据本发明的实施例,利用立体照像机实时检测患者的植牙手术部位的立体影像数据和手柄的位置,将立体影像数据和植牙手术部位的ct影像数据进行坐标匹配并重叠之后,控制手柄的位置,由此具有以手术者所需的深度和角度可穿孔用于植牙手术的孔的效果。
8、[专利文献]
9、(专利文献001)kr 10-1810878(授权日期:2017年12月14日)
10、(专利文献002)kr 10-1395618(授权日期:2014年05月09日)
11、(专利文献003)kr 10-2182094(授权日期:2020年11月17日)
12、(专利文献004)kr 10-2060544(授权日期:2019年12月23日)
13、(专利文献005)kr 10-1373066(授权日期:2014年03月05日)
技术实现思路
1、技术问题
2、本发明提供可由单一固定装置同时固定多个旋转臂及调节轴等的定位臂。
3、解决问题的方案
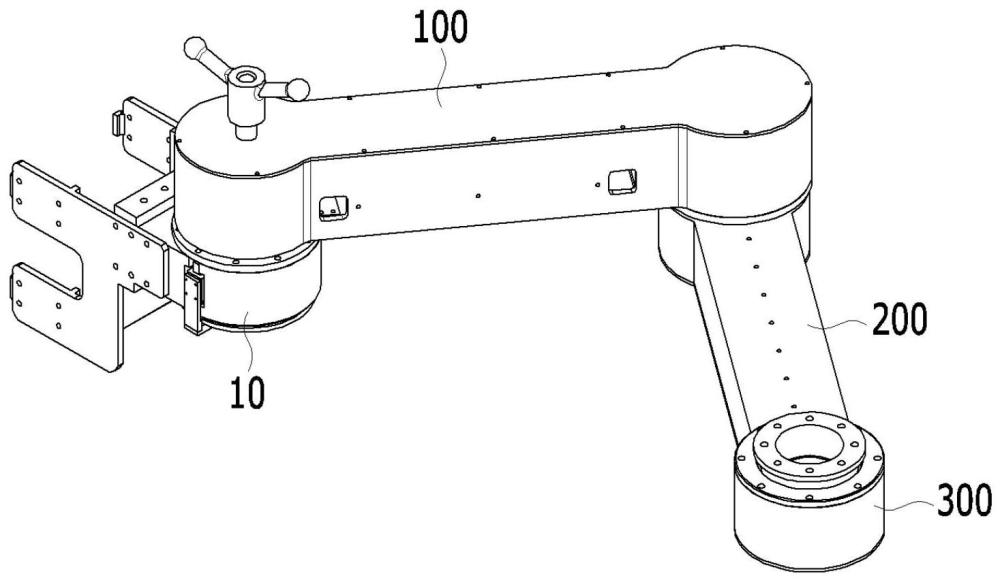
4、本发明是可由单一固定装置固定位置的第一定位臂的发明,其包括:第一旋转臂,能够相对于基座进行旋转;第二旋转臂,能够相对于上述第一旋转臂进行旋转;以及固定模块,控制上述第一旋转臂及第二旋转臂的旋转。
5、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述固定模块包括:第一旋转轴,连接上述基座和上述第一旋转臂;旋钮,位于上述第一旋转轴的一端,能够提供驱动力;以及第一摩擦垫,位于上述第一旋转轴的另一端,借助上述旋钮的旋转而发生变位。
6、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述固定模块包括:第一固定块,借助上述旋钮的旋转而发生变位;以及第二固定块,借助由上述第一固定块的变位而产生的驱动力而发生变位。
7、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述固定模块包括第一轴,上述第一轴的一端通过齿条和小齿轮方式与上述第一固定块紧固,借助上述第一固定块的变位,使上述第一轴旋转。
8、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述固定模块包括:第二旋转轴,连接上述第一旋转臂和上述第二旋转臂;以及第二摩擦部,借助上述第二固定块的变位,与上述第二固定块相接触并与接收摩擦力的上述第二旋转臂一体地形成。
9、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述固定模块包括:第三固定块,借助上述第二旋转轴,与上述第二摩擦部一体地形成;以及第二轴,借助上述第三固定块的变位而发生变位。
10、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述第三固定块和上述第二轴相接的面形成为斜面。
11、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,包括:机械装配台,能够相对于上述第二旋转臂进行旋转;以及第二摩擦垫,借助上述第二轴的变位,与上述机械装配台相接触。
12、本发明是可由单一固定装置固定位置的第一定位臂的发明,在前面揭示的发明中,上述机械装配台包括:第三摩擦部,呈圆筒形状;以及结合部,位于上述第三摩擦部的内侧,可设置机械装置,上述第二摩擦垫借助变位,与上述第三摩擦部相接而提供摩擦力。
13、本发明是可由单一固定装置固定位置的第二定位臂的发明,包括:2个4节连杆,包括固定位置的固定轴;以及不同的2个调节轴,上述2个4节连杆中与上述固定轴分享接头,上述2个4节连杆分别由平行四边形结构形成,并包括用于固定上述不同的2个调节轴之间的相对角度的制动器。
14、本发明是可由单一固定装置固定位置的第二定位臂的发明,在前面揭示的发明中,上述调节轴包括:气缸;活塞,能够沿着上述气缸的长度方向进行移动;根据随着上述制动器的移动而发生的第一变位,发生作为上述活塞的变位的第二变位。
15、本发明是可由单一固定装置固定位置的第二定位臂的发明,在前面揭示的发明中,上述制动器包括:滑轮,其能够旋转;金属丝,卷绕在上述滑轮,与上述活塞连接;以及第二弹性体,一端与上述活塞结合,沿着上述第二变位的方向施加弹性力。
16、本发明是可由单一固定装置固定位置的第二定位臂的发明,在前面揭示的发明中,上述第一变位和上述第二变位相互垂直。
17、本发明是可由单一固定装置固定位置的第二定位臂的发明,在前面揭示的发明中,上述活塞包括:连动部,设在上述活塞的一侧,与上述制动器连动;以及加压部,设在上述活塞的另一侧。
18、本发明是可由单一固定装置固定位置的第二定位臂的发明,在前面揭示的发明中,上述气缸包括:制动器紧固部,设在上述气缸的一侧,与上述制动器紧固;支撑体接头,设在上述气缸的另一侧,包括连接接头,上述连接接头与上述支撑体接头紧固,上述支撑体接头和上述连接接头由球-座的结构紧固。
19、本发明是可由单一固定装置固定位置的第二定位臂的发明,在前面揭示的发明中,包括:支撑体结合部,与上述连接接头一体地形成;第一定位臂,与上述支撑体结合部结合。
20、发明的效果
21、本发明的第一及第二定位臂可提供可由单一固定装置同时固定多个旋转臂及调节轴等的结构及效果。
本文地址:https://www.jishuxx.com/zhuanli/20240617/52199.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种可调式镶嵌用夹持机构
下一篇
返回列表