一种巡检机器人用操作台的制作方法
- 国知局
- 2024-07-08 11:10:32
本技术涉及机器人,尤其涉及一种巡检机器人用操作台。
背景技术:
1、智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。越来越多的巡检机器人应用到巡检工作中。巡检机器人需要安装到操作平台上,辅助其沿巡检路线运动。
2、现有技术,例如公告号为cn216424100u的专利文件公开了具有同步皮带联动万向脚轮机构的巡检机器人平台。采用同步皮带联动一侧两个万向脚轮机构,方便实现转向。目前,还缺少一种设备,实现四组行走组件的轮子同步转向,将使转弯过程更为平稳。
3、因此,针对上述问题,提出一种巡检机器人用操作台,来解决上述问题。
技术实现思路
1、本实用新型针对现有技术的不足,研制一种巡检机器人用操作台,该实用新型实现四组行走组件的轮子同步转向,将使转弯过程更为平稳。
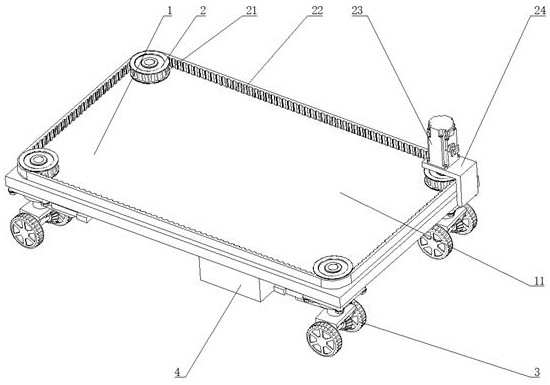
2、本实用新型解决技术问题的技术方案为:本实用新型提供了一种巡检机器人用操作台,包括机架组件,所述机架组件包括底盘,所述底盘的下侧四角分别连接轴承座;四组行走组件,分别设置在所述底盘的一角,所述行走组件包括阶梯轴,所述阶梯轴轴承连接所述轴承座,所述阶梯轴轴承连接筒轴,所述筒轴的下侧连接u板的横板中心,所述阶梯轴穿过所述u板连接动力锥齿轮;所述u板的两个竖板分别轴承连接轮轴的一端,所述轮轴的两端分别连接轮子,所述轮轴连接锥齿轮,所述动力锥齿轮啮合所述锥齿轮;所述阶梯轴连接行走动力组件。通过采用行走组件,方便实现本装置的运动。
3、作为优化,所述行走动力组件包括动力电机,所述动力电机的输出轴连接一个所述阶梯轴,所述动力电机连接电机支架,所述动力电机的输出轴穿过所述电机支架,所述电机支架连接所述底盘,每个所述阶梯轴分别连接转轮,环形带环绕每个所述转轮。通过采用环形带带动四个转轮同时转动,采用锥齿轮啮合,实现所有的轮子同步转动,方便实现本装置平稳移动。
4、作为优化,所述底盘连接转弯组件,所述转弯组件包括滑槽,所述底盘的下侧中心连接所述滑槽,所述滑槽连接电机,所述电机的输出轴穿过所述滑槽的一端,所述电机的输出轴连接螺杆,所述螺杆设置在所述滑槽内,所述螺杆轴承连接所述滑槽的另一端,所述滑槽内设置有滑块,所述螺杆螺纹连接所述滑块,所述滑块连接对称的t板,对称的所述t板分别连接对称的直槽。通过采用电机带动,方便实现转弯。
5、作为优化,每个所述筒轴分别连接连接杆的一端,每个所述连接杆的另一端上侧分别连接圆块,每个所述圆块分别设置在对应的所述直槽内。通过将圆块设置在直槽内,通过电机带动,实现四组轮子同时同步转向,将使转弯过程更为平稳。
6、作为优化,所述底盘的下侧连接蓄电池,所述动力电机及所述电机分别电性连接所述蓄电池。方便实现为动力电机及电机提供动力。
7、技术实现要素:中提供的效果仅仅是实施例的效果,而不是实用新型所有的全部效果,上述技术方案具有如下优点或有益效果:
8、(1)本装置通过设置转弯组件,通过电机带动,实现四组轮子同时同步转向,将使转弯过程更为平稳。
9、(2)本装置通过采用环形带带动四个转轮同时转动,采用锥齿轮啮合,实现所有的轮子同步转动,方便实现本装置平稳移动。
10、(3)本装置通过采用筒轴与阶梯轴轴承连接,方便实现在轮子转动同时实现轮子转弯,操作方便。
技术特征:1.一种巡检机器人用操作台,其特征是:包括机架组件(1),所述机架组件(1)包括底盘(11),所述底盘(11)的下侧四角分别连接轴承座(12);
2.根据权利要求1所述的一种巡检机器人用操作台,其特征是:所述行走动力组件(2)包括动力电机(23),所述动力电机(23)的输出轴连接一个所述阶梯轴(34),所述动力电机(23)连接电机支架(24),所述动力电机(23)的输出轴穿过所述电机支架(24),所述电机支架(24)连接所述底盘(11),每个所述阶梯轴(34)分别连接转轮(21),环形带(22)环绕每个所述转轮(21)。
3.根据权利要求2所述的一种巡检机器人用操作台,其特征是:所述底盘(11)连接转弯组件(5),所述转弯组件(5)包括滑槽(52),所述底盘(11)的下侧中心连接所述滑槽(52),所述滑槽(52)连接电机(51),所述电机(51)的输出轴穿过所述滑槽(52)的一端,所述电机(51)的输出轴连接螺杆(55),所述螺杆(55)设置在所述滑槽(52)内,所述螺杆(55)轴承连接所述滑槽(52)的另一端,所述滑槽(52)内设置有滑块(56),所述螺杆(55)螺纹连接所述滑块(56),所述滑块(56)连接对称的t板(53),对称的所述t板(53)分别连接对称的直槽(54)。
4.根据权利要求3所述的一种巡检机器人用操作台,其特征是:每个所述筒轴(33)分别连接连接杆(32)的一端,每个所述连接杆(32)的另一端上侧分别连接圆块(31),每个所述圆块(31)分别设置在对应的所述直槽(54)内。
5.根据权利要求3所述的一种巡检机器人用操作台,其特征是:所述底盘(11)的下侧连接蓄电池(4),所述动力电机(23)及所述电机(51)分别电性连接所述蓄电池(4)。
技术总结本技术提供了一种巡检机器人用操作台,包括机架组件,所述机架组件包括底盘,所述底盘的下侧四角分别连接轴承座;四组行走组件,分别设置在所述底盘的一角,所述行走组件包括阶梯轴,所述阶梯轴轴承连接所述轴承座,所述阶梯轴轴承连接筒轴,所述筒轴的下侧连接U板的横板中心,所述阶梯轴穿过所述U板连接动力锥齿轮;所述U板的两个竖板分别轴承连接轮轴的一端,所述轮轴的两端分别连接轮子,所述轮轴连接锥齿轮。本技术涉及机器人技术领域,尤其涉及一种巡检机器人用操作台。本技术针对现有技术的不足,研制一种巡检机器人用操作台,该技术实现四组行走组件的轮子同步转向,将使转弯过程更为平稳。技术研发人员:许超,王更阳,杨宙,杨奇受保护的技术使用者:大唐海口清洁能源发电有限责任公司技术研发日:20230925技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52313.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。