一种基于高性能醚化细菌纤维素的仿生软体手指
- 国知局
- 2024-07-08 11:11:00
本发明涉及一种软体机器人,具体是涉及一种基于高性能醚化细菌纤维素的仿生软体手指。
背景技术:
1、我国手部存在残疾的群体大约为500万,手指功能不全严重影响了他们的日常生活。因此,研发出替代手部功能的仿生器械引起了科研人员的关注。
2、中国专利申请cn113263514a公开了一种刚柔耦合仿生手指及仿生手,涉及多种结构,包括模块化安装结构、刚性驱动结构、刚性骨架、软体机构,模块化安装结构用于固定刚性驱动结构、刚性骨架和软体机构的块化安装,刚性驱动结构被用于推动刚性骨架实现运动,软体机构则在刚性骨架的带动下弯曲,以模仿前z位姿、前倾位姿、后z位姿和后倾位姿的仿生。这种设计可以合理地模拟手指在不同受力情况下的位姿,并根据使用场景灵活地自动切换这些位姿,从而具有较高的灵巧度。
3、中国专利申请cn107901066b公开了一种仿生手,包括手掌机构与五根手指机构,通过对应的旋转轴连接,食指机构、中指机构、无名指机构和小拇指机构的远指节、中指节、近指节和第一基座依次连接。在大拇指机构中,远指节、近指节和第二基座之间也通过对应的旋转轴连接。这样的设计赋予了仿生手多个自由度。第一基座设置第一电位计,第二基座设置第二电位计,以检测指节的转动位置。
4、然而上述仿生手与仿生手指依靠传统的刚性执行器,能耗高、约束多、结构复杂,无法应用在柔软易破损的目标物体上,因此使用局限性较大。
技术实现思路
1、本发明的目的是克服上述背景技术中的不足,提供一种基于高性能醚化细菌纤维素的仿生软体手指,该手指应具有结构简单、控制方便、轻便安全的特点。
2、本发明的技术方案是:
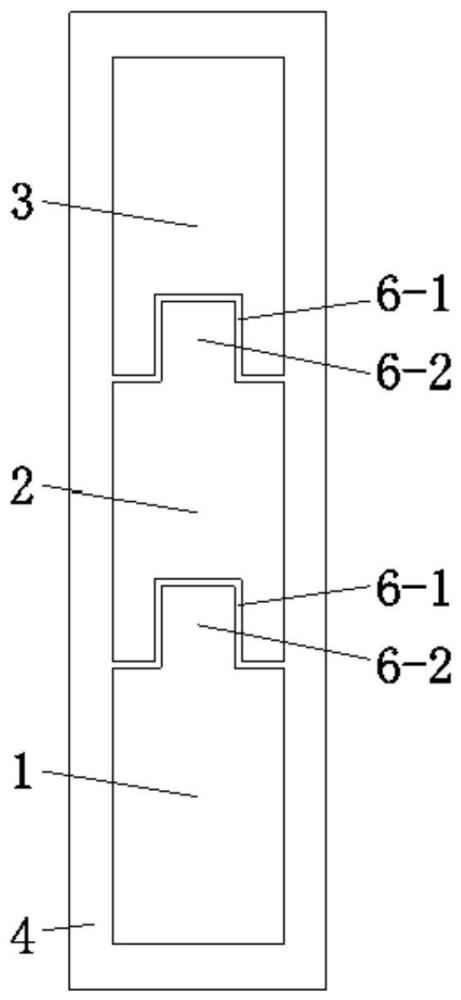
3、一种基于高性能醚化细菌纤维素的仿生软体手指,包括手指本体与驱动控制器,其特征在于:所述手指本体包括柔性支撑框架以及贴合在柔性支撑框架上的若干柔性驱动器;所述柔性驱动器串联布置并保持一定的间距;所述驱动控制器通过导线分别电连接所有柔性驱动器。
4、所述柔性驱动器的数量为三个;所述柔性驱动器的间距为0.5-1.5mm。
5、相邻两个所述柔性驱动器之间设有连接结构;所述连接结构包括设置在其中一个柔性驱动器端部的凹陷部以及设置在下一个柔性驱动器端部并且伸入所述凹陷部的凸出部。
6、所述柔性驱动器包括离子交换膜以及设置在离子交换膜两侧的电极层;所述柔性支撑框架为聚酰亚胺绝缘膜。
7、所述离子交换膜由高性能醚化细菌纤维素、石墨烯与1-乙基-3-甲基咪唑滃四氟硼酸盐经混合搅拌制得;所述电极层为涂覆在离子交换膜两侧的pedot:pss电极液经过腐蚀离子交换膜与干燥后制得。
8、所述高性能醚化细菌纤维素的制备过程为:使用异丙醇提供溶解环境;在碱性环境下将细菌纤维素蓬松处理;使用环氧丙基三烷基氯化铵取代纤维素上的羟基基团,经离心洗涤后得到高性能醚化细菌纤维素。
9、所述驱动控制器包括单片机、正弦波发生pcb板、电源、功率放大模块。
10、本发明的工作原理是:
11、手指本体上配置三个柔性驱动器来模拟手指的三个关节,达到了更大的工作空间,驱动控制器产生的驱动信号作用在柔性驱动器上时可使其发生形变,当作用在同一手指本体的三个柔性驱动器上的驱动信号按照一定时序和规律进行通断,便可模拟人类手指的多模态运动方式与目标物体进行交互。
12、本发明的有益效果是:
13、1、使用高性能醚化细菌纤维素(醚化改性后的细菌纤维素)为主体材料,性能更加优异且轻便环保;
14、2、具有结构简单并且控制方便的特点,适合在各种形状的空间内工作;
15、3、多个柔性驱动器可协同工作,能够模仿人的手指进行单关节弯曲和多关节同时弯曲,具有大的自由度和工作空间,
16、4、结构简单、组装方便、操作方便安全。
技术特征:1.一种基于高性能醚化细菌纤维素的仿生软体手指,包括手指本体与驱动控制器(5),其特征在于:所述手指本体包括柔性支撑框架(4)以及贴合在柔性支撑框架上的若干柔性驱动器;所述柔性驱动器串联布置并保持一定的间距;所述驱动控制器通过导线分别电连接所有柔性驱动器。
2.根据权利要求1所述的基于高性能醚化细菌纤维素的仿生软体手指,其特征在于:所述柔性驱动器的数量为三个;所述柔性驱动器的间距为0.5-1.5mm。
3.根据权利要求2所述的基于高性能醚化细菌纤维素的仿生软体手指,其特征在于:相邻两个所述柔性驱动器之间设有连接结构;所述连接结构包括设置在其中一个柔性驱动器端部的凹陷部(6-1)以及设置在下一个柔性驱动器端部并且伸入所述凹陷部的凸出部(6-2)。
4.根据权利要求3所述的基于高性能醚化细菌纤维素的仿生软体手指,其特征在于:所述柔性驱动器包括离子交换膜(2-1)以及设置在离子交换膜两侧的电极层(2-2);所述柔性支撑框架为聚酰亚胺绝缘膜。
5.根据权利要求4所述的基于高性能醚化细菌纤维素的仿生软体手指,其特征在于:所述离子交换膜由高性能醚化细菌纤维素、石墨烯与1-乙基-3-甲基咪唑滃四氟硼酸盐经混合搅拌制得;所述电极层为涂覆在离子交换膜两侧的pedot:pss电极液经过腐蚀离子交换膜与干燥后制得。
6.根据权利要求5所述的基于高性能醚化细菌纤维素的仿生软体手指,其特征在于:所述高性能醚化细菌纤维素的制备过程为:使用异丙醇提供溶解环境;在碱性环境下将细菌纤维素蓬松处理;使用环氧丙基三烷基氯化铵取代纤维素上的羟基基团,经离心洗涤后得到高性能醚化细菌纤维素。
7.根据权利要求6所述的基于高性能醚化细菌纤维素的仿生软体手指,其特征在于:所述驱动控制器包括单片机(1-1)、正弦波发生pcb板(1-5)、电源(1-3)、功率放大模块(1-4)。
技术总结本发明涉及一种软体机器人,具体是涉及一种基于高性能醚化细菌纤维素的仿生软体手指。该仿生软体手指能够模仿人的手指进行单关节弯曲和多关节同时弯曲,具有大的自由度和工作空间,并且多个驱动器间可以协作完成目标任务,其结构简单、操作方便、轻便安全。技术方案是:一种基于高性能醚化细菌纤维素的仿生软体手指,包括手指本体与驱动控制器,其特征在于:所述手指本体包括柔性支撑框架以及贴合在柔性支撑框架上的若干柔性驱动器;所述柔性驱动器串联布置并保持一定的间距;所述驱动控制器通过导线分别电连接所有柔性驱动器。技术研发人员:王帆,齐瑞斌,李明受保护的技术使用者:浙江理工大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52345.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表