一种公共环境卫生自动清洁设备的制作方法
- 国知局
- 2024-07-09 16:39:16
本发明具体涉及一种公共环境卫生自动清洁设备,属于环境清洁。
背景技术:
1、环卫工人需要每天对街巷、道路和公共场所等区域进行清洁,保证公共环境的洁净,防止细菌滋生,现有技术中,大多是通过专门的保洁人员进行清洁处理,劳动强度大且清洁效率低;为此,中国专利公开号:cn112240015a,公开了一种公共环境卫生自动清洁设备,该结构通过保洁人员驾驶清洁车,即可在需要清洁的地面上自动完成清洁工作,但该结构仍需要人工参与到清洁工作中,且清洁时,只能够完成小颗粒和灰尘类垃圾进行清扫,对于枯枝、垃圾袋和瓶罐等大体积垃圾无法进行清扫处理;再如中国专利公开号:cn109944199b,公开的一种公共卫生用清洁消毒车,该结构能够实现清扫和消毒;但该结构仍未解决需要人工参与清洁,及对大体积垃圾清扫问题。
技术实现思路
1、为解决上述问题,本发明提出了一种公共环境卫生自动清洁设备,能够自动对公共环境进行清洁,清洁时,能够分别清理各个尺寸的垃圾,清理效果好。
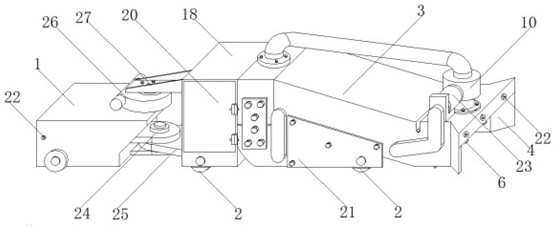
2、本发明的公共环境卫生自动清洁设备,包括驱动车头,所述驱动车头前端铰接有卫生清洁设备,所述卫生清洁设备和驱动车头之间设置有回转机构;所述卫生清洁设备底部安装有万向轮;清洁时,通过驱动车头驱动卫生清洁设备在公共区域进行行走清洁;驱动车头上的回转机构能够调整卫生清洁设备方向,调整时,通过卫生清洁设备底部的万向轮能够及时响应卫生清洁设备角度,从而适应公共区域各个位置的清洁;所述卫生清洁设备包括:
3、第一清洁模组,所述第一清洁模组包括管仓,所述管仓前端设置有收料斗;所述管仓和收料斗之间通过轴承安装有第一旋转轴;所述第一旋转轴上间隔固定有多个桨体;所述第一旋转轴远离收料斗一侧铰接有摆动板,所述摆动板靠近第一旋转轴一侧固定有限位块;所述管仓下部至上部设置有传输带;所述管仓于桨体顶面固定有负压风机;
4、第二清洁模组,所述第二清洁模组包括料仓,所述料仓前端和底面中空,所述料仓内侧安装有两个清扫刷,所述料仓顶部固定有两组第一电机,所述第一电机的输出轴与清扫刷固定;所述料仓后端设置有弧形导向部;所述弧形导向部上部设置有出料口;所述料仓内侧设置有第二旋转轴,所述第二旋转轴上间隔固定有刮板;所述刮板与弧形导向部内壁贴合;所述料仓通过连板固定于管仓后端底部;
5、清洁集料箱,所述清洁集料箱固定于管仓和料仓后端;所述清洁集料箱内侧设置有斜隔板;所述出料口对接斜隔板下方;所述管仓顶部对接斜隔板上方;所述负压风机通过管道连接到管仓上方;所述清洁集料箱侧部铰接有带锁卸料门。
6、驱动车头根据设定的行走路径推动卫生清洁设备行进,行进时,驱动车头前端的管仓、收料斗和缓料外围板在地面形成围设空间;随着驱动车头的推进,收料斗持续收集路面上的垃圾,当垃圾进入到收料斗内侧时,由于第一旋转轴和桨体持续进行旋转;能够将大个体垃圾推上管仓下部,当大个体垃圾被桨体推顶,并通过摆动板后,随着传输带上传,由于摆动板受到限位块作用,摆动板只能够单向摆动,大个体垃圾在传输带下滑时,受到摆动板限位;从而避免大个体垃圾重新滑入桨体处;当桨体旋转接触地面时,刮起的扬尘和轻质垃圾通过负压风机上抽;并通过管道将扬尘送入管仓上方,从而扬尘和大个体垃圾送入到清洁集料箱,当进入收料斗内的小个体垃圾被桨体筛分,并随着驱动车头的持续推进,小个体垃圾进入到料仓前端,此时,由于两组第一电机同步旋转,第一电机驱动两个清扫刷相向旋转;将收料斗和缓料外围板内两侧的小个体垃圾刮至中部,并被两个清扫刷送至料仓内侧;此时,第二旋转轴旋转,第二旋转轴驱动刮板旋转,能够将进入料仓内的小个体垃圾通过刮板上刮;刮板和弧形导向部配合,将小个体垃圾推送至出料口,最后进入到清洁集料箱,当卫生清洁设备工作一段时间后,对带锁卸料门进行解锁,从清洁集料箱内抽出两个集料仓,并对两个集料仓进行清理,清理后重新送入到清洁集料箱,并重新上锁即可。
7、进一步地,所述管仓底部前端两侧至料仓外部固定有缓料外围板;缓料外围板和管仓配合,能够在清理地面上形成封闭罩,既能够收集和缓存小个体垃圾,方便清扫刷进行清扫;同时避免清扫过程中,造成周边扬尘现象。
8、进一步地,所述第一清洁模组前端和驱动车头尾端两侧固定有多个避障摄像头,驱动车头推动卫生清洁设备行进,当前端出现障碍物时,避障摄像头检测到障碍物,卫生清洁设备的回转机构动作,改变行进路径,驱动车头再次推动卫生清洁设备向前行进,直到驱动车头尾部的避障摄像头先检测到障碍物,再次丢失障碍物时,表示清洁设备已经完成避障;驱动车头回到设定路径,进行卫生清洁作业。
9、进一步地,所述管仓下端顶面通过电机座固定有第二电机,所述第二电机通过传动皮带连接到第一旋转轴,所述第一旋转轴通过传动皮带连接到传输带的一个辊体,所述传输带的另一辊体通过传动皮带连接到第二旋转轴;第二电机工作时,第二电机先驱动第一旋转轴旋转,第一旋转轴同步驱动传输带的辊体旋转,传输带驱动第二旋转轴同步旋转;第二电机同步完成驱动桨体提料和分筛工作,驱动传输带大个体垃圾提料,及驱动刮板对小个体垃圾进行刮料作业。
10、进一步地,所述驱动车头包括车体,所述车体上设置有行走动力系统,所述行走动力系统和回转机构接入到控制器,所述控制器连接有寻迹模组、遥控模组和路径存储器;所述遥控模组与遥控终端通信连接;工作时,可在远程或现场操作遥控终端,远程操作时,可通过避障摄像头进行现场画面监测;遥控终端向遥控模组发送前进、后退和转向指令;遥控模组接收指令后,并将接收指令送入到控制器,控制器控制行走动力系统进行行进或后提,及控制回转机构进行转向作业;驱动车头行进时,控制器通过寻迹模组进行现场记录行进路径;并将行进路径存储于路径存储器内;当需要自动清洁时,驱动车头行进到初始位,此时,控制器从路径存储器中调取历史路径,驱动车头持续行进;行进时,寻迹模组根据调取的历史路径作为导航路径,驱动车头根据导航路径进行行进,实现对公共环境卫生自动清洁。
11、进一步地,所述寻迹模组由gps、激光雷达或摄像头组成。
12、进一步地,所述驱动车头前端固定有第一铰接座,所述卫生清洁设备后端固定有第二铰接座,所述第一铰接座和第二铰接座之间通过销柱铰接;所述回转机构包括固定于驱动车头顶面的电动回转台,所述电动回转台的回转端通过回转臂与卫生清洁设备固定;当卫生清洁设备需要换向时,电动回转台驱动回转臂进行摆动,回转臂驱动卫生清洁设备进行摆动转向,卫生清洁设备转向时,通过销柱、第一铰接座和第二铰接座配合,保证转向平稳性。
13、进一步地,所述回转机构包括固定于驱动车头和卫生清洁设备之间的铰接耳;所述铰接耳之间铰接有液压缸;所述液压缸偏心设置于驱动车头和卫生清洁设备铰接位;当卫生清洁设备需要换向时,液压缸伸缩,驱动卫生清洁设备一侧前推或后拉,从而驱动卫生清洁设备进行摆动转向。
14、与现有技术相比,本发明的公共环境卫生自动清洁设备,能够根据设定的清扫路径和清扫时间对公共区域进行自动清洁,清洁时,能够对清扫区域建立封闭罩,实现封闭式清扫,防止清洁出现扬尘现象;清洁过程中,先通过第一旋转轴驱动桨体进行筛分,将大垃圾筛分进行收集,小垃圾筛分通过桨体后,通过清扫刷甩入料仓,并通过刮板刮入清洁集料箱进行收集;从而能够对公共区域垃圾进行全面收集。
本文地址:https://www.jishuxx.com/zhuanli/20240617/54148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表