一种基于工业摄影测量的公路预制T梁智能落梁控制装置的制作方法
- 国知局
- 2024-07-09 16:54:22
本发明涉及架桥机,具体涉及一种基于工业摄影测量的公路预制t梁智能落梁控制装置。
背景技术:
1、架桥机是一种将预制好的梁片架设到预制桥墩上的设备,属于起重机范畴,主要功能是将梁片提起,然后运送到规定位置后落下,在落梁时应保证落梁位置符合设计要求。
2、现有技术中,一般只通过单一指标判断梁片是否架梁准确,如专利cn 112146575a只通过梁片的三维坐标判断梁片是否架梁准确,该种方式未考虑梁片的三维姿态,无法判断落梁结束后梁片的横坡与纵坡是否满足设计要求,因此无法保证精确落梁。
技术实现思路
1、本技术通过提供了一种基于工业摄影测量的公路预制t梁智能落梁控制装置,同时根据待架梁片的三维坐标和三维姿态矩阵与设计三维坐标和设计三维姿态矩阵的偏差判断梁片是否架梁正确,相比于现有技术中只通过三维坐标判断梁片是否架梁正确,具有更高的精确性。
2、本技术提供了一种基于工业摄影测量的公路预制t梁智能落梁控制装置,包括:
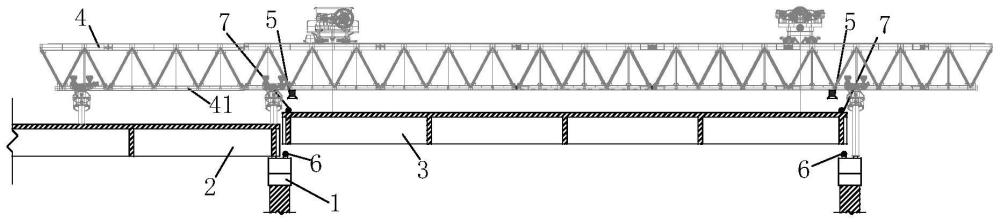
3、第一测量定位靶标,所述第一测量定位靶标安装于桥墩的支座垫石的顶面;
4、第二测量定位靶标,所述第二测量定位靶标安装于待架t梁梁片(3)的顶面;
5、工业相机,所述工业相机安装于架桥机的桁架下缘,
6、工业处理器,所述工业处理器用于采集工业相机的图像信号并可用于确定第一测量定位靶标和第二测量定位靶标在相机坐标系中的三维坐标及三维姿态矩阵;
7、显示模块;所述显示模块与所述的工业处理器通讯连接;
8、所述装置可用于执行如下方法步骤:
9、步骤s11:在落梁前,通过所述第一测量定位靶标识别第一测量定位靶标的空间坐标,并建立第一空间直角坐标系;
10、步骤s12:在落梁过程中,通过所述第二测量定位靶标识别第二测量定位靶标位于第一空间直角坐标系中的三维坐标,将所述三维坐标与所述设计三维坐标进行比对,得到待架t梁梁片的位置偏差,并在所述显示模块中实时显示;
11、步骤s13:在落梁结束后,通过所述第二测量定位靶标识别第二测量定位靶标位于第一空间直角坐标系中的三维姿态矩阵,将所述三维姿态矩阵与所述设计三维姿态矩阵进行比对,以判断待架t梁梁片的实际横坡与纵坡是否满足设计要求,并在所述显示模块中实时显示姿态偏差。
12、进一步地,所述步骤s11具体包括以下步骤:
13、s111:标定第一测量定位靶标图案的定位点群;
14、s112:采用边界提取法对靶标图案进行边缘检测,提取带有边缘等级信息的边缘拓扑表;其中,边缘等级信息可以为:中心定位圆为第一等级,边缘定位圆为第二等级;其中,靶标图案、各定位点的数量以及各参数可根据实际需要设定;
15、s113:采用最小二乘法拟合对中心定位圆的边界进行处理,得到中心定位圆的圆心坐标,即为中心定位点的像面坐标;
16、s114:采用最小二乘法拟合对多个边缘定位点的边界进行处理,得到多个边缘定位点的圆心坐标,即为多个边缘定位点的像面坐标;
17、115:根据各定位点的像面坐标,建立物面的三维坐标系,即所述的第一空间直角坐标系。
18、进一步地,所述步骤s12具体包括以下步骤:
19、s121:标定第二测量定位靶标图案的定位点群;
20、s122:采用边界提取法对靶标图案进行边缘检测,提取带有边缘等级信息的边缘拓扑表;其中,边缘等级信息可以为:中心定位圆为第一等级,边缘定位圆为第二等级;
21、s123:采用最小二乘法拟合对中心定位圆的边界进行处理,得到中心定位圆的圆心坐标,即为中心定位点的像面坐标;
22、s124:采用最小二乘法拟合对多个边缘定位点的边界进行处理,得到多个边缘定位点的圆心坐标,即为多个边缘定位点的像面坐标;
23、s125:利用定位点群中的各定位点求解像面映射到物面的二维坐标系下的透视变换矩阵与平移矩阵,将平移矩阵转化至第一直角坐标系,转化后的平移矩阵即是第二测量定位靶标在第一直角坐标系中的三维坐标;
24、s126:将第二测量定位靶标在第一直角坐标系中的三维坐标与设计三维坐标进行比对,得到待架t梁梁片的位置偏差,并在显示模块中以图像信息的形式实时显示。
25、进一步地,所述步骤s13具体包括以下步骤:
26、s131:落梁结束后,标定第二测量定位靶标图案的定位点群;
27、s132:采用边界提取法对靶标图案进行边缘检测,提取带有边缘等级信息的边缘拓扑表;其中,边缘等级信息可以为:中心定位圆为第一等级,边缘定位圆为第二等级
28、s133:采用最小二乘法拟合对中心定位圆的边界进行处理,得到中心定位圆的圆心坐标,即为中心定位点的像面坐标;
29、s134:采用最小二乘法拟合对多个边缘定位点的边界进行处理,得到多个边缘定位点的圆心坐标,即为多个边缘定位点的像面坐标;
30、s135:利用定位点群中的各定位点求解像面映射到物面的二维坐标系下的透视变换矩阵与平移矩阵,将透视变换矩阵转化至第一直角坐标系,转化后的透视变换矩阵即为待架t梁梁片的三维姿态矩阵;
31、s136:将待架t梁梁片的三维姿态矩阵与设计的三维姿态矩阵进行比对,判断待架t梁梁片的实际横坡与纵坡是否满足设计要求,并在显示模块中实时显示姿态偏差与是否需要重新落梁的指令。
32、可选的,工业处理器用于将偏差值转化为数字信息和图像信息。
33、可选的,工业处理器包括数据采集单元和数据处理单元,所述的数据采集单元与工业相机采用通讯连接,用于采集工业相机的图像数据;所述的数据处理单元与数据采集单元通讯连接,用于对所述的图像数据进行数据处理。
34、可选的,工业相机铰接于所述架桥机的桁架下缘。
35、可选的,第一测量定位靶标与第二测量定位靶标用于将光信号反射给所述工业相机。
36、本技术实施例提供的技术方案与现有技术相比具有如下优点:
37、1、在落梁过程中,根据梁片的三维坐标与设计三维坐标的偏差确定梁片是否正确落梁,在根据三维坐标这一指标确定梁片正确落梁后,再根据梁片的三维姿态矩阵与设计三维姿态矩阵进行比对,以判断梁片的实际横坡与纵坡是否满足设计要求。由于本技术同时根据待架梁片的三维坐标和三维姿态矩阵与设计三维坐标和设计三维姿态矩阵的偏差判断梁片是否架梁正确,相比于现有技术中只通过三维坐标判断梁片是否架梁正确,具有更高的精确性。
38、2、此外,与现有专利cn 112146575 a相比,本技术还通过定位点群的方式来确定梁片的三维坐标和三维姿态矩阵,该种方式也具有更高的精确度。
39、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240617/55552.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表