一种海洋锚固基础抗拔承载力模型试验装置及测试方法
- 国知局
- 2024-07-09 17:43:25
本发明属于海洋岩土工程领域,涉及一种抗拔承载力模型试验装置及测试方法,具体涉及一种能够测试海洋锚固基础抗拔承载力的模型试验装置及抗拔承载力的测试方法。
背景技术:
1、随着能源需求的日益增加,海洋能源的开发利用成为了新的能源增长极,海洋资源开发逐步向深水、超深水迈进,因此对深海平台的稳定性要求也越来越高。目前,维持深海平台稳定的主要手段是通过重力锚、法向承力锚、吸力式锚、吸力嵌入式平板锚和鱼雷锚等锚固基础,提供抗拔承载力,将平台稳固在海洋之上。锚固基础的抗拔承载力依靠土与基础相互作用来提供,并通过锚索与海洋平台联系在一起,组成了紧绷式系泊系统。锚固基础在工作过程中,会受到上部平台及锚索传来的洋流拖带力(视为静荷载)和潮汐、风浪等产生的动荷载的影响,此外,海底锚索与海床表面成一定角度,锚固基础往往受到较大的斜向上拉力,这将对锚固基础的抗拉性能提出了更高的要求,所以正确估计锚固基础的极限抗拔承载力对深海平台系统的设计至关重要。
2、目前,发明专利“基于海洋管线群锚作用的拉拔力测量试验装置及测量方法”(授权号:cn114894624b),设计一种通过两个模型箱实现双锚板的拉拔试验,而且还可实现沿0°-90°范围内任一角度的锚板拉拔,并由卷扬机同时为两个锚板提供拉力。发明专利“基于海底斜坡场地锚板基础的抗拔力测量装置及测量方法”(授权号:cn114892733a),研发海底斜坡场地锚板基础抗拔承载特性的三维测试装置,由卷扬机提供拉力。以上抗拔试验装置仅是考虑单调抗拔作用,并未能综合考虑海洋中随时存在的波浪等引起的动力影响,且模型所用土样也未能还原真实海洋土的正常固结土状态。随着海洋工程建设的蓬勃发展,必需提升试验的拟真程度,以阐明海洋锚固基础的抗拔机理,并分析其承载机制与破坏机制,进而获得抗拔承载力计算方法,这对于探究海洋平台运行过程中的稳定性具有重要意义。
技术实现思路
1、为提升海洋锚固基础的抗拔承载力的研究基础,本发明提供一种能够测试海洋锚固基础抗拔承载力的模型试验装置及测试方法。该试验装置通过不锈钢模型方舱,承受高水压作用,实现大体积正常固结土样制作;依靠plc数字控制实现静/动荷载作用下抗拔力测试,模拟锚固基础的受力状态;采用拉拔速率控制和位移传感器等,实时监测锚固基础抗拔承载力和锚固基础的移动变化,以期综合抗拔力与位移关系,确定锚固基础抗拔承载力与运动位置的变化规律。
2、本发明的技术方案为:
3、一种海洋锚固基础抗拔承载力模型试验装置,包括模型方舱、加载系统、供水系统和数字控制与数据采集系统;
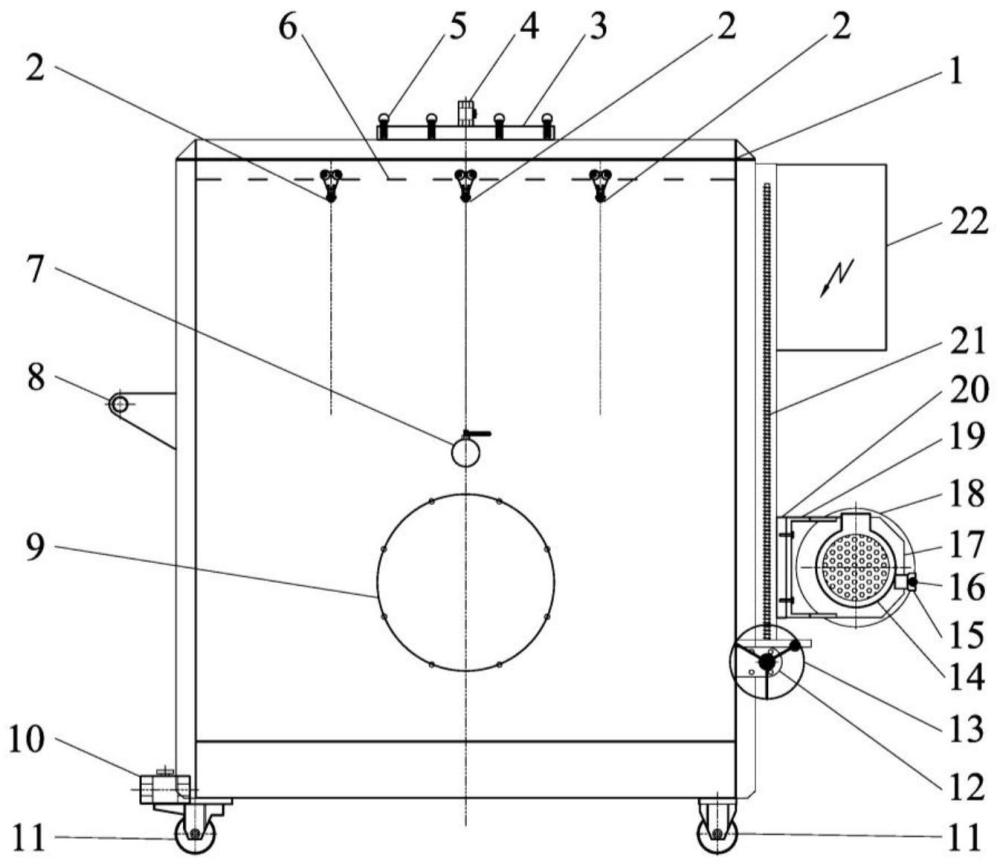
4、所述的模型方舱用于对土样制作和锚固基础的放置,其包括方形模型舱1、移动滑环2、第一密封舱门3、注水阀4、紧固螺栓5、滑轨6、第一排水阀7、推拉扶手8、第二密封舱门9、第二排水阀10、重型车轮11、承重渗透网23、v型排水槽24、第一观察窗28、第二观察窗29和叠加式密封块35;其中,移动滑环2在方形模型舱1内,其安装在滑轨6,通过上部的两个滑轮在滑轨6上移动,通过下部的一个滑轮稳固锚链并提供大于45°的拉拔角度,用于固定预埋锚固基础并控制其埋置深度;第一密封舱门3固定于方形模型舱1顶部,二者间安装有密封垫,用于施加渗流力以及预埋锚固基础的锚链搭接操作;注水阀4设置在方形模型舱1顶部,用于顶部注水进行土样渗透固结;滑轨6沿方形模型舱1纵向设置;第一排水阀7设置在第二密封舱门9上部,距顶部1/2处,用于土样固结完成后,排除多余水分以进行后续实验;推拉扶手8设置在方形模型舱1横向侧壁上部,用于推拉模型方舱;第二密封舱门9固定于方形模型舱1纵向侧壁上,二者间安装有密封垫;第二排水阀10设置在方形模型舱1横向侧壁底部,与推拉扶手8在同一侧壁上,用于土样渗透固结过程中排水;重型车轮11设置在方形模型舱1的底部,用于移动方形模型舱1和承受方形模型舱1重量;承重渗透网23设置在方形模型舱1内部底部,用于承受上部土层压力并保持良好渗透性;v型排水槽24设置在承重渗透网23下部,用于快速排除承重渗透网23渗透的水;第一观察窗28设置在第二密封舱门9对面的纵向侧壁上,其与方形模型舱1间安装有密封垫,用于试验时观察方形模型舱1内上部的情况;第二观察窗29设置在第一观察窗28下部,其与方形模型舱1之间安装有密封垫,用于试验时观察方形模型舱下部的情况;叠加式密封块35设置在推拉扶手8对面的横向侧壁上,由多个可密封叠加的不锈钢块构成,其与方形模型舱1之间安装有一层密封垫,并用螺栓固定在侧壁上,用于封堵穿过锚链的长槽,并在后续拉拔试验时通过增减钢块实现拉拔角度变化;
5、所述的加载系统用于施加不同角度的拉拔力,其包括传力杆固定板12、手轮13、力矩电机14、位移传感器固定架15、位移传感器16、第一连接板17、力矩调节器18、第二连接板19、方形升降板20、螺杆21、锚链卷轮25、第一传力齿轮26、第二传力齿轮27、第一升降滑轨30、第二升降滑轨31、支撑底板32、调节弹簧33、位移传感器定位器34和传力杆41;其中,传力杆固定板12用于固定传力杆41并保证传力杆41转动顺滑;手轮13固定于传力杆41端部,用于转动传力杆41来升降力矩电机14;力矩电机14用于提供拉拔力;位移传感器固定架15固定在力矩电机的外壳上,用于固定位移传感器16,位移传感器16用于测量锚链拉拔长度;第一连接板17用于连接力矩电机14与力矩调节器18,力矩调节器18设有三个调节弹簧33,用于平稳输出力矩,提供拉拔力;第二连接板19用于连接力矩电机14与方形升降板20,方形升降板20用于固定力矩电机14并协同上下升降,螺杆21用于移动方形升降板20;锚链卷轮25用于拉拔时锚链旋转收纳,并通过位移传感器定位器34拉动位移传感器16;第一传力齿轮26和第二传力齿轮27协同工作,将手轮13转动传力杆41引起的圆周运动转化为直线运动,进而转动螺杆21带动方形升降板20上下移动;第一升降滑轨30和第二升降滑轨31用于固定方形升降板20,并保证方形升降板20平顺活动;支撑底板32用于稳固第一升降滑轨30和第二升降滑轨31;位移传感器定位器34用于将连接位移传感器16的拉绳转向90度与锚链卷轮25连接;传力杆41用于传递手轮13的扭力;
6、所述的供水系统用于提供渗透水压,其包括加水口42、加压阀43、压力表44、压力室45和第三排水阀46;其中,加水口42用于压力室45内水位不足时快速加水;加压阀43用于给压力室45提供所需的空气压力;压力表44用于监测压力室内的压力情况;压力室45用于存储水并提供试验所需的水压;第三排水阀46与注水阀4相连,用于为方形模型舱1持续提供水压;供水系统的各部分通过阀门控制;
7、所述的数字控制与数据采集系统,用于控制拉拔速率、设定拉力数值、加载频率、加载波形以及采集传感器的数据;数字控制与数据采集系统包括数字控制与数据采集箱22;其中,数字控制与数据采集箱22连接力矩电机14和位移传感器16,在试验中采集存储拉拔力数据与位移数据。
8、所述的叠加式密封块35包括上圆弧块36、标准块37和下圆弧块38;其中,上圆弧块36由3个螺栓固定在侧壁上,其下端设置凸头39,与标准块37的上部凹槽40吻合,并通过挤压凹槽40内的密封条实现密封;标准块37由2个螺栓固定在侧壁上,其上端设置凹槽40,凹槽40内放置圆形密封条,其下端设置凸头39,与相邻标准块37和下圆弧块38的上部凹槽40吻合,并通过挤压凹槽40内的密封条实现密封;下圆弧块38由3个螺栓固定在侧壁上,其上端设置凹槽40,凹槽40内放置圆形密封条,与标准块37的下部凸头39吻合,并通过挤压凹槽40内的密封条实现密封。
9、所述的数字控制与数据采集系统内置8通道采集装置,可同步采集试验所需的传感器数据。
10、一种用海洋锚固基础抗拔承载力模型试验装置的测试方法,包括以下步骤:
11、步骤1:关闭各个阀门和第二密封舱门9,在方形模型舱1底部铺设土工布,然后铺设滤纸;对于需考虑预埋的锚固基础,放置多个基础模型,然后将锚链系在移动滑环2上,通过调节移动滑环2位置和锚链长度,确定位置和高度;称量所需土料,制成泥浆,打开第一密封舱门3,将泥浆通过泥浆泵从方形模型舱1顶部的第一密封舱门3处注入,直到泥浆达到预定高度;清洗各个部件,收集所有残余泥浆,并注入方形模型舱1内;根据干土重量w1、泥浆高度h1、方形模型舱1面积s1,确定初始干密度ρdini;
12、ρdini=w1/h1×s1
13、步骤2:由第一密封舱门3注水至顶部,然后关闭第一密封舱门3,打开注水阀4,继续注水至注水阀4溢出,关闭注水阀4;保持供水系统内管路充满水,然后将方形密封舱4的注水阀4与供水系统的第三排水阀46相连,依次打开供水系统的第三排水阀46、方形模型舱1的注水阀4、方形模型舱1横向侧壁底部第二排水阀10,开始土体固结;由第一观察窗28、第二观察窗29确定土的固结是否达到预定目标,根据土体沉降高度h2,确定固结后土的平均干密度ρdave;
14、ρdave=w1/[(h1-h2)×s1]
15、步骤3:将供水系统压力降至零,关闭供水系统的第三排水阀46和方形模型舱1横向侧壁底部第二排水阀10;拆除方形模型舱1的注水阀4和供水系统的第三排水阀46之间的管路,打开方形模型舱1纵向侧壁中部的第一排水阀7,将多余水分放出,然后关闭第一排水阀7;关闭方形模型舱1的注水阀4,打开第一密封舱门3;根据需要拆除部分叠加式密封块35,然后通过第一密封舱门3将预埋锚固基础的锚链与锚链卷轮25相连;如果需安装锚固基础,则通过第一密封舱门3将其压入土中,然后将锚链与锚链卷轮25相连;
16、步骤4:确定并设置拉拔角度,对于大于45°的拉拔角度将锚链通过移动滑环2下部的滑轮再连接力矩电机14,调节移动滑环2位置实现;对于小于45°的拉拔角度由锚链直接连接力矩电机14,转动手轮13,通过第一传力齿轮26和第二传力齿轮27调节力矩电机14的高度来实现;用数据线将位移传感器16与数字控制与数据采集箱22连接,将位移传感器伸缩杆通过位移传感器定位器34与锚链卷轮25相连;
17、步骤5:打开电源,开启数字控制与数据采集系统,对静力试验直接设置拉拔速率,开启试验;对动力实验,先施加一定静态抗拔力,以模拟锚索绷紧状态,再设置动荷载幅值、加载频率和加载波形,然后开启试验;力矩电机14带动锚链对锚固基础施加拉力,使得锚固基础产生位移,位移传感器16也同步伸缩,数字控制与数据采集系统将同步记录所有数据直到试验结束。
18、本发明的有益效果:通过不锈钢模型方舱,承受高水压、防止海水侵蚀,实现大体积正常固结土样制作;依靠移动滑环和叠加式密封块实现0-90°的拉拔角度调节;采用plc数字控制施加静/动荷载,完成锚固基础抗拔力试验研究,进而确定锚固基础抗拔承载力与运移位置的变化规律。
本文地址:https://www.jishuxx.com/zhuanli/20240617/60347.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表