膜式水冷壁管焊接定位方法及装置与流程
- 国知局
- 2024-06-21 09:35:40
本发明涉及膜式水冷壁焊接,尤其涉及一种膜式水冷壁管焊接定位方法及装置。
背景技术:
1、大型锅炉是火力发电的关键设备之一。它是一种通过在内部燃烧煤粉,烧热周围水冷壁管道内的水变为水蒸气,驱动汽轮机发电的设备。水冷壁是火电厂锅炉主要的蒸发受热面,水冷壁布置在燃烧室四周,其主要作用有:吸收燃烧室的辐射热,使水受热产生饱和蒸汽;水冷壁可使炉膛出口温度冷却到灰的软化温度以下,防止结焦吸收炉内热量,这对减轻炉内结渣、防止炉膛出口结渣都是十分有利的;水冷壁是四周敷设,隔开燃烧室与炉墙、防止炉墙被破坏,保护炉墙,同时防止炉膛结焦以及结渣对炉膛的破坏;水冷壁的采用简化了炉墙的结构,减轻炉墙重量,这主要是由于水冷壁传热效率好,故能降低锅炉钢材的消耗量及锅炉造价,且便于安装。
2、根据相关统计显示,因水冷壁问题导致的安全事故数量占到了火电站所有事故总量的40%。这个数量和比例仍处在不断上升的趋势,造成巨大损失。因此,定期检测和维修水冷壁,对火电站安全运行、维护国家和企业经济发展具有重要意义。
3、常见的锅炉膜式水冷壁管故障可以大致分为磨损。拉裂等。目前,水冷壁的维修主要还是以人工焊接为主,首先,关闭待检测的锅炉,接着,焊接工人通过搭建脚手架或钢管搭建的“升降梯”的方式靠近水冷壁管,而后进行手工焊接修复作业,然而,传统的人工检测方式总结有以下缺点:人工作业危险系数高;水冷壁管高度一般在几十米左右,搭建脚手架攀爬,存在极大的安全隐患;检测维护的成本较高。检修时需将锅炉停止运行,延误生产,影响企业效益;人工焊接受到焊工的操作水平、工作状态,现场的工作环境等各方面的影响,无法保证焊接效率和质量从而延长电厂检修工期。
4、相对于手工焊接,自动焊接可以很大程度上克服上述问题,如对焊工技能的依赖性低、焊接参数稳定、焊接质量优良和焊接效率高等。但是受限于水冷壁管带有曲面的特殊结构、拟焊接焊缝为弧形焊缝,如何精确定位到水冷壁管的拟焊接焊缝位置,使焊接组件的移动路径能够适配于水冷壁管的曲面结构,是现有技术中尚未能解决的难点。
技术实现思路
1、本发明要解决的技术问题在于,针对上述背景技术提出的问题,提供一种膜式水冷壁管焊接定位方法及装置,能够精确定位到水冷壁管的拟焊接焊缝位置,使焊接组件的移动路径能够适配于水冷壁管的曲面结构。
2、本发明解决其技术问题所采用的技术方案是:提供一种膜式水冷壁管焊接定位方法,其包括以下步骤:
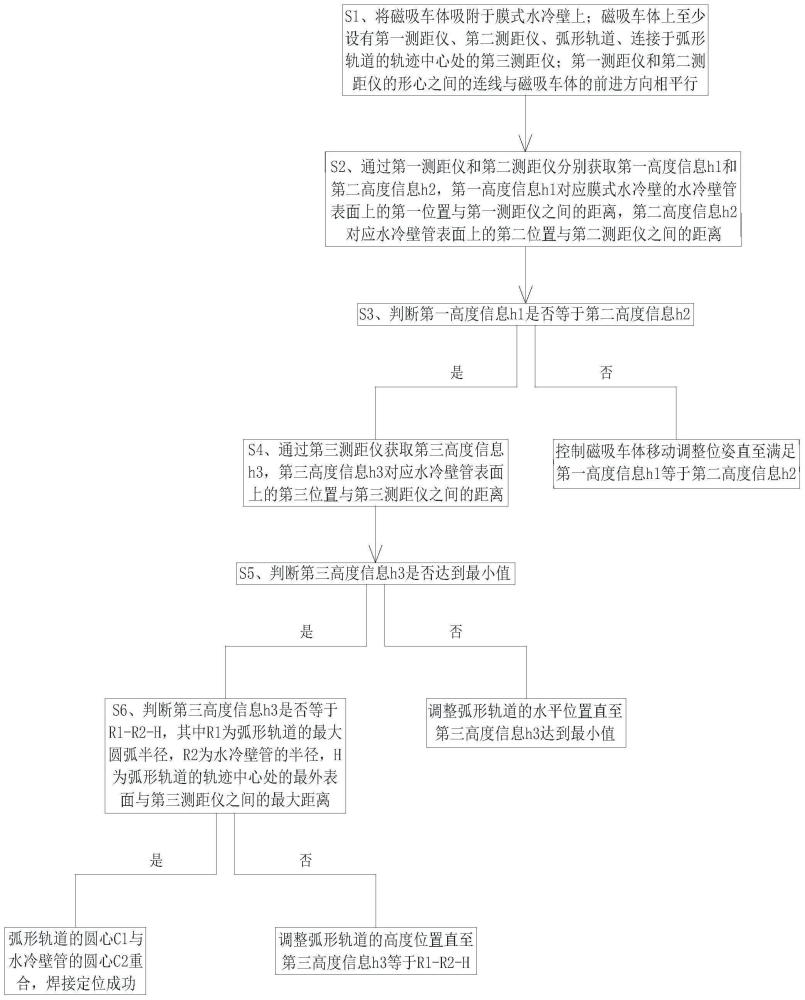
3、s1、将磁吸车体吸附于膜式水冷壁上;第一测距仪、第二测距仪、弧形轨道分别与所述磁吸车体连接并且随所述磁吸车体移动;所述第一测距仪和所述第二测距仪的发射端之间的连线与所述磁吸车体的前进方向相平行;第三测距仪连接于所述弧形轨道的轨迹中心处;
4、s2、通过所述第一测距仪和第二测距仪分别获取第一高度信息h1和第二高度信息h2,所述第一高度信息h1对应所述第一测距仪在所述膜式水冷壁的水冷壁管表面上测得的距离,所述第二高度信息h2对应所述第二测距仪在所述水冷壁管表面上测得的距离;
5、s3、判断第一高度信息h1是否等于第二高度信息h2:
6、若是,则执行步骤s4;
7、若否,则控制所述磁吸车体移动调整位姿直至满足第一高度信息h1等于第二高度信息h2;
8、s4、通过所述第三测距仪获取第三高度信息h3,所述第三高度信息h3对应所述第三测距仪在所述水冷壁管上测得的距离;
9、s5、在所述第三测距仪的高度位置不变的基础上,判断第三高度信息h3是否达到最小值:
10、若是,则执行步骤s6;
11、若否,则调整所述弧形轨道的水平位置直至第三高度信息h3达到最小值;
12、s6、判断第三高度信息h3是否等于r1-r2-h4,其中r1为所述弧形轨道的最大圆弧半径,r2为所述水冷壁管的半径,h4为所述弧形轨道的轨迹中心处的最外表面与所述第三测距仪之间的最大距离;
13、若是,则判断所述弧形轨道的最大圆弧圆心c1与所述水冷壁管的圆心c2重合,焊接定位成功;
14、若否,则调整所述弧形轨道的高度位置直至第三高度信息h3等于r1-r2-h4。
15、优选地,所述第一测距仪相比所述第二测距仪更加靠近所述磁吸车体的后侧;步骤s3中,控制所述磁吸车体移动调整位姿直至满足第一高度信息h1等于第二高度信息h2包括:
16、继续判断所述第一高度信息h1与所述第二高度信息h2之间的大小,若第一高度信息h1>第二高度信息h2,则控制所述磁吸车体向其前进方向的左侧转动;若第一高度信息h1<第二高度信息h2,则控制所述磁吸车体向其前进方向的右侧转动,直至第一高度信息h1等于第二高度信息h2。
17、优选地,步骤s5中,调整所述弧形轨道的水平位置直至第三高度信息h3达到最小值包括:
18、s51、控制所述弧形轨道沿所述磁吸车体前进方向的左侧或右侧作第一次移动,同时记录第一次移动过程中所述第三高度信息h3的变化;
19、s52、判断所述第三高度信息h3为逐渐增大还是逐渐减小;
20、若判断所述第三高度信息h3逐渐增大,则控制所述弧形轨道反向移动,记录反向移动过程中第三高度信息h3的最小值,将所述弧形轨道移动至第三高度信息h3的最小值对应的水平位置;
21、若判断所述第三高度信息h3逐渐减小,则控制所述弧形轨道继续正向移动,记录正向移动过程中第三高度信息h3的最小值,将所述弧形轨道移动至第三高度信息h3的最小值对应的水平位置;
22、和/或,步骤s6中,调整所述弧形轨道的高度位置直至第三高度信息h3等于r1-r2-h4包括:
23、s61、控制所述弧形轨道沿垂直于所述膜式水冷壁的鳍片的方向作第一次移动,同时记录第一次移动过程中预设值q的变化,所述预设值q=h3-(r1-r2-h4);
24、s62、判断所述预设值q为逐渐增大还是逐渐减小;
25、若判断所述预设值q逐渐增大,则控制所述弧形轨道反向移动,记录反向移动过程中预设值q的最小值,将所述弧形轨道移动至预设值q的最小值对应的高度位置;
26、若判断所述预设值q逐渐减小,则控制所述弧形轨道继续正向移动,记录正向移动过程中预设值q的最小值,将所述弧形轨道移动至预设值q的最小值对应的高度位置。
27、本发明还提供一种膜式水冷壁管焊接定位装置,其包括磁吸车体、位姿反馈单元、三维空间位置调节单元、弧形轨道、用于获取第三高度信息h3的第三测距仪;
28、所述位姿反馈单元和所述三维空间位置调节单元分别设置在所述磁吸车体上并随所述磁吸车体移动;所述位姿反馈单元包括用于获取第一高度信息h1的第一测距仪、用于获取第一高度信息h2的第二测距仪;
29、所述弧形轨道设置在所述三维空间位置调节单元上并随所述三维空间位置调节单元能够在两两相互垂直的x方向、y方向和z方向上移动,其中所述x方向与所述磁吸车体的前后移动方向一致;
30、所述第三测距仪连接于所述弧形轨道的轨迹中心处。
31、优选地,所述位姿反馈单元还包括直线电机模组、连接件、摄像头;
32、所述直线电机模组安装在所述磁吸车体上并随所述磁吸车体移动,所述连接件与所述直线电机模组连接并且能够沿所述直线电机模组的长度方向来回移动,所述第一测距仪、第二测距仪和第一摄像头分别连接于所述连接件;
33、其中,所述直线电机模组的长度方向与所述磁吸车体的前后移动方向相垂直,所述第一测距仪和第二测距仪的发射端之间的连线与所述磁吸车体的前后移动方向相平行。
34、优选地,所述弧形轨道包括弧形基体、设置在所述弧形基体上的弧形齿条和弧形槽;所述膜式水冷壁管焊接定位装置还包括第一回转驱动单元;
35、所述第一回转驱动单元包括滚轮、第一从动齿轮,第二从动齿轮、第一主动齿轮、第一电机、第一传动轴;所述滚轮与所述弧形槽滚动配合,所述第一从动齿轮与所述弧形齿条啮合,所述第一从动齿轮和所述第二从动齿轮通过所述第一传动轴传动连接,所述第二从动齿轮与所述第一主动齿轮啮合,所述第一电机的输出轴与所述第一主动齿轮传动连接;
36、其中,所述第一主动齿轮和所述第二从动齿轮的中轴线相垂直。
37、优选地,所述三维空间位置调节单元包括x向调节组件、y向调节组件、z向调节组件;
38、所述x向调节组件与所述磁吸车体连接并随所述磁吸车体移动;所述y向调节组件与所述x向调节组件连接且能够在x方向上移动;所述z向调节组件与所述y向调节组件连接且能够在所述x方向和y方向上移动;所述弧形轨道与所述z向调节组件连接且能够在所述x方向、y方向和z方向上移动;
39、或者,所述y向调节组件与所述磁吸车体连接并随所述磁吸车体移动;所述x向调节组件与所述y向调节组件连接且能够在y方向上移动;所述z向调节组件与所述x向调节组件连接且能够在所述x方向和y方向上移动;所述弧形轨道与所述z向调节组件连接且能够在所述x方向、y方向和z方向上移动。
40、优选地,所述x向调节组件包括第二电机、第二主动齿轮、第三从动齿轮、第一丝杆、第一传动件;所述第二电机的输出端与所述第二主动齿轮传动连接,所述第三从动齿轮与所述第二主动齿轮啮合,所述第一丝杆与所述第三从动齿轮传动连接,所述第一传动件与所述第一丝杆传动连接,所述y向调节组件或所述z向调节组件与所述第一传动件连接并且随所述第一传动件移动;
41、其中,所述第一丝杆的长度方向与所述x方向一致。
42、优选地,所述y向调节组件包括第三电机、第三主动齿轮、第四从动齿轮、第二丝杆、第二传动件;所述第三电机的输出端与所述第三主动齿轮传动连接,所述第四从动齿轮与所述第三主动齿轮啮合,所述第二丝杆与所述第四从动齿轮传动连接,所述第二传动件与所述第二丝杆传动连接,所述x向调节组件或所述z向调节组件与所述第二传动件连接并且随所述第二传动件移动;其中,所述第二丝杆的长度方向与所述y方向一致。
43、优选地,所述z向调节组件包括第四电机、第四主动齿轮、第五从动齿轮、第三丝杆、第三传动件;所述第四电机的输出端与所述第四主动齿轮传动连接,所述第五从动齿轮与所述第四主动齿轮啮合,所述第三丝杆与所述第五从动齿轮传动连接,所述第三传动件与所述第三丝杆传动连接,所述x向调节组件或所述y向调节组件与所述第三传动件连接并且随所述第三传动件移动;
44、其中,所述第三丝杆的长度方向与所述z方向一致。
45、实施本发明至少具有以下有益效果:通过第一测距仪和第二测距仪反馈的第一高度信息和第二高度信息辅助调整磁吸车体的位姿,通过第三测距仪反馈的第三高度信息辅助调整弧形轨道的水平位置和高度位置,直至消除弧形轨道的圆心和水冷壁管的圆心之间的高度误差,使弧形轨道的圆心与水冷壁管的圆心重合,此时弧形轨道达到正确的焊接位置,使焊接组件沿着弧形轨道移动,便能够使焊接组件的移动路径适配于水冷壁管的曲面结构,最终可以在水冷壁管的曲面上得到合格的弧形焊缝。
本文地址:https://www.jishuxx.com/zhuanli/20240618/15140.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表