一种窄带前反馈混合型主动噪声控制系统及方法
- 国知局
- 2024-06-21 11:27:23
本发明涉及一种窄带前反馈混合型主动噪声控制系统及方法,属于主动噪声控制。
背景技术:
1、随着电声、集成电路、智能信号处理等技术的不断进步,主动噪声控制(activenoise control,anc)技术已被广泛应用于汽车、旋转机械等场合的降噪中。主动噪声控制技术采用声波相消干涉原理,具有良好的低频噪声抑制性能,以及体积小、成本低等优势,是对传统的被动噪声控制技术的有益补充(l.lu,k.yin,r.c.de lamare,z.zheng,y.yu,x.yang,b.chen,“asurvey on active noise control in the past decade,part i:linear systems,”signal process.183(2021),108039.)。根据控制器的结构,anc系统可分为前馈型、反馈型以及前反馈混合型三种。
2、实际工厂中存在大量的旋转设备产生的周期性有害噪声(如切割机噪声、引擎噪声等),通常其窄带分量占主导分量,在此情形下传统的窄带前馈型anc系统采用非声学传感器(如转速计等)获取参考信号时,设计基于离散傅里叶系数的控制器结构,来应对上述窄带目标噪声(s.m.kuo and d.r.morgan,“active noise control:a tutorial review,”proc.ieee,vol.87,no.6,pp.943-973,jun.1999.)。然而在某些工况场合,旋转机械产生的窄带目标噪声可能同时存在与参考信号有关的窄带目标噪声分量和与参考信号无关的窄带目标噪声分量,且两者之间的能量接近,此时如仍采用传统的窄带前馈型anc系统,其降噪性能会受到抑制。此时需要引入反馈主动噪声控制子系统来应对与参考信号无关的窄带目标噪声分量。因此,开发高性能的前馈和反馈相结合的窄带前反馈混合型anc系统,具有更加重要的实际应用价值。
3、一种窄带前反馈混合型anc系统,其采用前馈主动噪声控制子系统应对与参考信号有关的窄带目标噪声分离,采用反馈主动噪声控制子系统应对与参考信号无关的窄带频率分离,并引入了花火噪声抵消器为反馈主动噪声控制子系统提供可靠参考输入、以及为前馈主动噪声控制子系统提供可靠误差输出,同时改善了上述两个子系统的独立性(t.padhi,m.chandra,a.kar,and m.n.s.swamy,“anew adaptive control strategy forhybrid narrowband active noise control systems in a multi-noise environment,”applied acoustics,vol.146,pp.355-367,2019.)。然而,该系统仍存在以下问题:1、引入花火噪声抵消器可分离出与参考信号有关的窄带残余噪声分量,但是其分离出的与参考信号无关的残余噪声分量仍同时包含与参考信号无关的窄带残余噪声分量和与目标噪声中加性噪声有关的宽带噪声,若直接用该花火噪声抵消器分离出的与参考信号无关的残余噪声分量来合成反馈主动噪声控制子系统的参考信号、以及更新反馈控制器,导致合成的参考信号质量降低,且前馈主动噪声控制子系统和反馈主动噪声控制子系统之间的独立性较差,影响了整体系统的收敛性能;2、若窄带目标噪声中相同频率分量来自不同的噪声源时,即窄带目标噪声中的两个窄带分量具有相关性,在此工况下,上述窄带前反馈混合型anc系统的降噪性能将恶化,甚至导致系统不稳定;3、该系统假设次级通道是通过离线辨识获得的,然而实际工况下次级通道具有复杂时变性,也会严重影响系统的稳定性,针对该窄带前反馈混合型anc系统设计高效的次级通道在线辨识方法,具有重要的理论及应用价值。
4、为同时解决上述各控制子系统独立性较差、窄带目标噪声抑制性能不足和次级通道的复杂时变性等制约系统性能的问题,需要提供一种更有效且实用的窄带前反馈型混合型主动噪声控制系统。
技术实现思路
1、为了解决目前传统的窄带前反馈型混合型主动噪声控制系统存在各控制子系统独立性较差、窄带目标噪声抑制性能不足和次级通道的复杂时变性等,严重制约窄带前反馈型混合型主动噪声控制系统的收敛性和稳定性,同时降低整体系统的窄带目标噪声抑制性能的问题,本发明提供了一种窄带前反馈混合型主动噪声控制系统及方法。
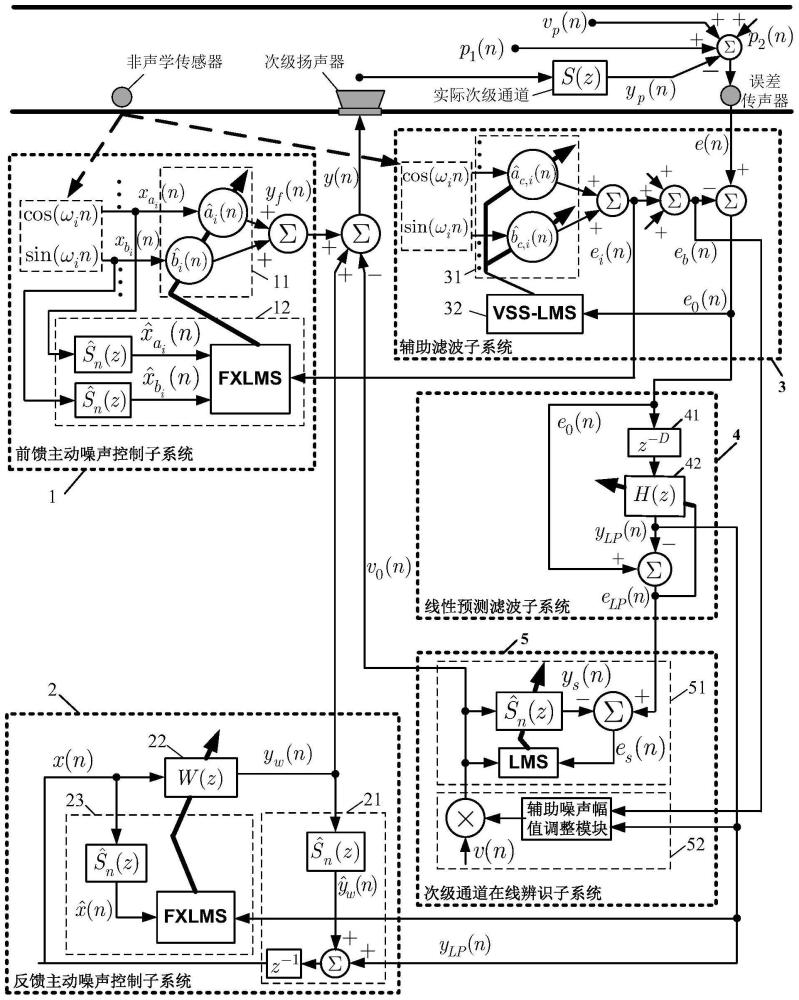
2、本发明的第一个目的在于提供一种窄带前反馈混合型主动噪声控制系统,包括:
3、前馈主动噪声控制子系统,用于合成与参考信号有关的窄带次级声源;
4、反馈主动噪声控制子系统,用于合成与参考信号无关的窄带次级声源;
5、辅助滤波子系统,用于从残余噪声中分离出与参考信号有关的窄带残余噪声分量和与参考信号无关的残余噪声分量;
6、线性预测滤波子系统,用于从与参考信号无关的残余噪声分量中分离出窄带残余噪声分量和宽带残余噪声分量;以及
7、次级通道在线辨识子系统,用于在线估计时变的实际次级通道,其包括辅助噪声调整模块;
8、所述辅助滤波子系统与所述前馈主动噪声控制子系统、所述线性预测滤波子系统、所述次级通道在线辨识子系统连接;所述辅助滤波子系统分离出的与参考信号有关的窄带残余噪声分量,分别用作所述前馈主动噪声控制子系统的误差输出和所述次级通道在线辨识子系统的辅助噪声调整模块输入;同时,所述辅助滤波子系统分离出的与参考信号无关的残余噪声分量,用作所述线性预测滤波子系统的输入;
9、所述线性预测滤波子系统与所述反馈主动噪声控制子系统、所述次级通道在线辨识子系统连接;所述线性预测滤波子系统分离出的与参考信号无关的窄带残余噪声分量,分别用作所述反馈主动噪声控制子系统的误差输出和所述次级通道在线辨识子系统的辅助噪声调整模块输入;同时,所述线性预测滤波子系统分离出的宽带残余噪声分量,用作所述次级通道在线辨识子系统的期望输入;可提升前馈主动噪声控制子系统、反馈主动噪声控制子系统、次级通道在线辨识子系统之间的独立性,改善系统的动态性能,同时引入所述次级通道在线辨识子系统中的辅助噪声调整模块,降低辅助噪声对残余噪声的贡献量,有效降低与参考信号有关和与参考信号无关的窄带目标噪声分量,提升系统的噪声抑制性能。
10、在本发明一种实施方式中,所述前馈主动噪声控制子系统包括前馈控制器和第一滤波-x最小均方算法模块;
11、所述前馈控制器采用离散傅里叶系数表示,所述离散傅里叶系数为其中q为参考信号的窄带频率数目;n为时刻,n≥0;
12、所述第一滤波-x最小均方算法模块采用所述辅助滤波子系统分离出的与参考信号有关的窄带残余噪声分量作为误差输出,并用于更新所述前馈控制器;所述前馈控制器的系数更新公式为:
13、
14、
15、其中,μf为所述前馈控制器的更新步长,取值为正值;为参考信号分别经所述第一滤波-x最小均方算法模块中次级通道估计模型的输出;ωi为参考信号的第i个窄带频率;
16、所述前馈主动噪声控制子系统获得与参考信号有关的窄带次级声源为:
17、
18、在本发明一种实施方式中,所述反馈主动噪声控制子系统包括内部参考合成模块、反馈控制器和第二滤波-x最小均方算法模块,所述内部参考合成模块包括次级通道估计模型和一阶延迟环节,用于合成内部参考信号x(n),即
19、
20、其中,为所述反馈控制器的输出经次级通道估计模型的输出,ylp(n)为所述辅助滤波子系统分离出的与参考信号无关的窄带残余噪声分量;
21、所述反馈控制器采用线性滤波器,所述线性滤波器的系数和长度分别为和lw;
22、所述第二滤波-x最小均方算法模块采用所述辅助滤波子系统分离出的与参考信号无关的窄带残余噪声分量ylp(n)作为误差输出,并用于更新所述反馈控制器的系数;所述反馈控制器的系数更新公式为:
23、
24、其中,μw为所述反馈控制器的更新步长,取值为正值;为所述内部参考合成模块提供的x(n)经所述第二滤波-x最小均方算法模块中次级通道估计模型的输出;
25、所述反馈主动噪声控制子系统获得的与参考信号无关的窄带次级声源为:
26、
27、在本发明一种实施方式中,所述辅助滤波子系统包括傅里叶分析器和变步长最小均方算法模块;所述傅里叶分析器采用离散傅里叶系数表示,即
28、所述变步长最小均方算法模块采用所述辅助滤波子系统分离出的与参考信号无关的宽带残余噪声分量e0(n)作为误差输出,并用于更新傅里叶分析器;所述傅里叶分析器的系数更新公式为:
29、
30、
31、其中,μc(n)为所述傅里叶分析器的更新步长,取值为正值;采用所述变步长最小均方算法模块对步长μc(n)进行实时更新,步长更新公式为
32、
33、其中,ξ、η为用户参数,均取小于1的正值;
34、所述辅助滤波子系统分离出的与参考信号有关的窄带残余噪声分量为
35、
36、所述辅助滤波子系统分离出的与参考信号无关的残余噪声分量为
37、e0(n)=e(n)-eb(n);
38、其中,e(n)为n时刻的残余噪声;
39、同时,所述辅助滤波子系统分离出的与参考信号有关的窄带残余噪声分量,用作所述次级通道在线辨识子系统中的辅助噪声调整模块输入。
40、在本发明一种实施方式中,所述线性预测滤波子系统包括延迟环节和线性预测滤波器,所述延迟环节和线性预测滤波器级联,所述延迟环节的阶数为d;所述线性预测滤波器的系数和长度分别为和le,其系数采用最小均方算法进行更新,即:
41、hj(n+1)=hj(n)+μeelp(n)e0(n-d-j)
42、其中,μe为所述线性预测滤波器的更新步长,取值为正值;elp(n)为所述线性预测子系统分离出的宽带残余噪声分量;
43、所述线性预测滤波子系统从残余噪声分离出的与参考信号无关的窄带残余噪声分量和宽带残余噪声分量分别为
44、
45、elp(n)=e0(n)-ylp(n)
46、所述线性预测滤波子系统分离出的与参考信号无关的窄带残余噪声分量,用作所述次级通道在线辨识子系统中的辅助噪声调整模块输入;同时,所述线性预测滤波子系统分离出的宽带残余噪声分量,用作所述次级通道在线辨识子系统的期望输入。
47、在本发明一种实施方式中,所述次级通道在线辨识子系统还包括次级通道在线辨识模块;
48、所述次级通道在线辨识模块包括次级通道估计模型所述次级通道在线辨识模块以elp(n)为期望输入、以高斯白噪声v(n)经所述辅助噪声幅值调整模块后产生的辅助噪声v0(n)为参考输入,采用最小均方算法在线估计时变的实际次级通道;
49、所述次级通道在线辨识模块的次级通道估计模型采用线性滤波器,其系数和长度分别为和其系数更新公式为:
50、
51、es(n)=elp(n)-ys(n)
52、其中,μs为次级通道估计模型的更新步长,取值为正值;ys(n)为所述次级通道在线辨识模块的次级通道估计模型的输出;es(n)为所述次级通道在线辨识模块的误差输出;
53、所述辅助噪声v0(n)为:
54、v0(n)=v(n)gs(n)
55、gs(n)=λgs(n-1)+(1-λ)(|eb(n-1)|γ+|ylp(n-1)|γ)
56、其中,v(n)为均值为零、方差为的加性高斯白噪声;gs(n)为所述辅助噪声幅值调整模块的调整增益;λ为遗忘因子,λ∈[0,1);γ为幂指数,取值为1或2。
57、在本发明一种实施方式中,合成的次级声源为:
58、y(n)=yf(n)+yw(n)-v0(n)
59、目标噪声p(n)与次级扬声器提供的次级声源y(n)经过实际次级通道s(z)后的信号yp(n)在声学空间内干涉相消,即获得残余噪声e(n)=p(n)-yp(n),以实现主动噪声控制;
60、其中,实际次级通道s(z)表示从次级扬声器到误差传声器之间的声学空间模型;
61、目标噪声为:
62、p(n)=p1(n)+p2(n)+vp(n)
63、其中,p1(n)为声学空间内q个窄带频率对应的参考信号经实际次级通道s(z)传播到误差传声器处的信号;p2(n)为声学空间内与q个窄带频率有关或者无关的窄带目标噪声分量;vp(n)为均值为零、方差为的加性高斯白噪声。
64、在本发明一种实施方式中,所述系统通过实时计算平滑滤波后的残余噪声的能量变化,来在线监测次级通道模型或目标噪声的突变,以对所述前馈控制器的系数、所述前馈控制器的系数、所述傅里叶分析器的系数、所述线性预测滤波器的系数、所述次级通道估计模型的系数和所述辅助噪声幅值调整模块的调整增益进行重新初始化;
65、经平滑滤波后残余噪声的能量为:
66、pe(n)=λmpe(n-1)+(1-λm)e2(n)
67、其中,λm∈(0,1)为平滑滤波遗忘因子;
68、在n=n′np时刻,根据pe(n)进行时间平均和平滑滤波后得到:
69、
70、其中,n′为n整除np时大于1的正整数,np为时间平均窗长度,k为时刻,且k≤n;
71、当n时刻满足时,则在n+1时刻系统进行重新初始化;其中,α∈(1,2)为阈值参数。
72、在本发明一种实施方式中,所述主动噪声控制系统分别采用非声学传声器获取参考信号、采用误差传声器获取残余噪声、采用次级扬声器提供次级声源;声学空间中的实际次级通道为次级声源传播到误差传声器的通道模型。
73、本发明的第二个目的在于提供一种窄带前反馈混合型主动噪声控制方法,所述方法应用了所述的一种窄带前反馈混合型主动噪声控制系统,所述方法包括:
74、步骤一:设置系统参数;
75、设置前馈控制器、傅里叶分析器的更新步长;分别设置反馈控制器、线性预测滤波器、次级通道估计模型的长度及步长;设置延迟环节的阶数;设置辅助噪声调整模块的遗忘因子λ和幂指数γ;分别设置前馈控制器、反馈控制器、傅里叶分析器、线性预测滤波器、次级通道估计模型以及辅助噪声幅值调整模块的调整增益gs(n)的初始值均为零;设置辅助噪声v(n);
76、步骤二:获得参考信号;
77、在n时刻,采用非声学传感器获得窄带参考频率采用内部参考合成模块和n-1时刻的残余噪声e(n-1)和获得内部参考信号x(n);采用辅助噪声调整模块获得幅值调整增益gs(n);
78、步骤三:在n时刻,首先,所述前馈控制器提供与参考信号有关的窄带次级声源yf(n),所述反馈控制器提供与参考信号无关的窄带次级声源yw(n);其次,采用所述辅助噪声幅值调整模块获得辅助噪声v0(n),进而v0(n)、yw(n)和yf(n)三者相加,合成得到次级声源y(n);最后,残余噪声e(n)经辅助滤波子系统分离得到与参考信号有关的窄带残余噪声分量eb(n)和与参考信号无关的残余噪声分量e0(n);
79、步骤四:在n时刻,与参考信号无关的残余噪声分量e0(n)经线性预测滤波子系统分别得到与参考信号无关的窄带残余噪声分量ylp(n)和与辅助噪声及目标信号中加性噪声有关的宽带残余噪声分量elp(n);ylp(n)用作所述次级通道在线辨识子系统中的辅助噪声调整模块输入;elp(n)用作次级通道在线辨识模块的期望输入;
80、步骤五:更新控制系统;
81、根据参考信号和与参考信号有关的窄带残余噪声分量计算更新所述前馈控制器在n+1时刻的系数;
82、根据内部合成参考信号x(n)和与参考信号无关的窄带残余噪声分量ylp(n),计算更新所述反馈控制器在n+1时刻的系数;
83、根据与参考信号无关的残余噪声分量e0(n)和与参考信号无关的宽带残余噪声分量elp(n),计算更新所述线性预测滤波器在n+1时刻的系数;
84、根据辅助噪声v0(n)和elp(n),计算更新所述次级通道在线辨识模块的次级通道估计模型在n+1时刻的系数;
85、根据与参考信号有关的窄带残余噪声分量eb(n)和与参考信号无关的窄带残余噪声分量ylp(n),计算更新所述辅助噪声幅值调整模块在n+1时刻的调整增益;
86、步骤六:监测真实次级通道或目标噪声的突变;
87、实时计算平滑滤波后残余噪声能量变化,若满足则在n+1时刻对所述前馈控制器的系数、前馈控制器的系数、傅里叶分析器的系数、线性预测滤波器的系数、次级通道估计模型的系数和所述辅助噪声幅值调整模块的调整增益进行重新初始化,然后进入步骤七;若满足则直接进入步骤七;
88、步骤七:返回到所述步骤二,重复所述步骤二到步骤六,直至系统逐步收敛并达到稳态,实现噪声控制。
89、本发明的有益效果在于:
90、(1)本发明无需设置参考传声器,有效地避免了声反馈的问题。
91、(2)本发明采用辅助滤波子系统分离出的与参考信号有关的窄带残余噪声分量来更新前馈控制器,采用线性预测滤波子系统分离出的与参考信号无关的窄带残余噪声分量来更新反馈控制器,以及采用线性预测滤波子系统分离出的与辅助噪声及目标信号中加性噪声有关的宽带残余噪声分量,用作次级通道在线辨识模块的期望输入,提升了前馈主动噪声控制子系统、前馈主动噪声控制子系统、次级通道在线辨识子系统之间的独立性,改善了次级通道在线辨识的精度和速度,同时还提升了整体系统的动态性能。
92、(3)本发明同时采用采用辅助滤波子系统分离出的与参考信号有关的窄带残余噪声分量、以及线性预测滤波子系统分离出的与参考信号无关的窄带残余噪声分量,共同用于辅助噪声幅值调整,有效地降低了引入的辅助噪声对残余噪声的贡献量,有效地降低了与参考信号有关和与参考信号无关的窄带目标噪声分量,提升了整体系统的降噪性能,理论上可实现系统达到稳态后的残余噪声能量趋于环境水平。
93、(4)本发明设置有次级通道在线辨识模块,可有效解决实际工况下次级通道的复杂时变性问题,满足实际应用需求。
94、(5)本发明不仅可降低包含不相关频率分量的窄带目标噪声,还能够有效应对包含相关频率分量的窄带目标噪声,拓宽了降噪应用范围。
本文地址:https://www.jishuxx.com/zhuanli/20240618/21633.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表