显微镜自动滴油控制方法及装置、设备、存储介质与流程
- 国知局
- 2024-06-21 12:08:31
本发明属于智能控制,具体涉及一种显微镜自动滴油控制方法及装置、设备、存储介质。
背景技术:
1、显微镜在观察细胞形态及特殊结构时,需要使用高倍物镜(100倍物镜),就需要用到香柏油,传统使用香柏油时,不仅需要手动添加,而且香柏油的量也无法控制,并且滴油位置的精确度也比较低。在使用中经常出现镜油溢出、滴油量无法控制、位置的精确度也不准确,浪费试剂、影响工作效率、污染设备,甚至在人工添加这种方式可能因为操作不当产生伤人事故。
2、目前现有技术中公开一些显微镜用自动滴油装置,可以实现自动识别使用高倍物镜情况,且自动定位滴油位置并自动控制滴油量,这可以大大提高滴油效率和降低以往操作过程中的不利影响。
3、但在实践中发现,观察一个玻片的部位细胞形态时,只需要滴加一次香柏油,就能满足使用,在观察同一个玻片的过程中可能存在多次切换高倍物镜的情况,如果每转换一次高倍物镜,就滴一滴镜油,容易导致镜油的浪费及镜油过多污染显微镜等情况的出现。
4、由此可见,现有显微镜自动滴油控制方法的智能化程度仍然不够,无法满足用户实际需求。
技术实现思路
1、本发明的目的在于提供一种显微镜自动滴油控制方法及装置、设备、存储介质,可以更加智能化,满足用户实际需求。
2、本发明第一方面公开一种显微镜自动滴油控制方法,应用于自动滴油装置,所述自动滴油装置包括控制装置以及分别与控制装置通信连接的滴油机构、重力传感器、液体感应器、光电传感器和霍尔传感器,其中,所述重力传感器、所述液体感应器、所述光电传感器分别内嵌于显微镜的载物台上,所述霍尔传感器固定于显微镜的载物台上,物镜的外壁上设置有磁铁,所述霍尔传感器与所述磁铁配合感应;所述控制装置用于执行所述自动滴油控制方法,所述自动滴油控制方法包括:
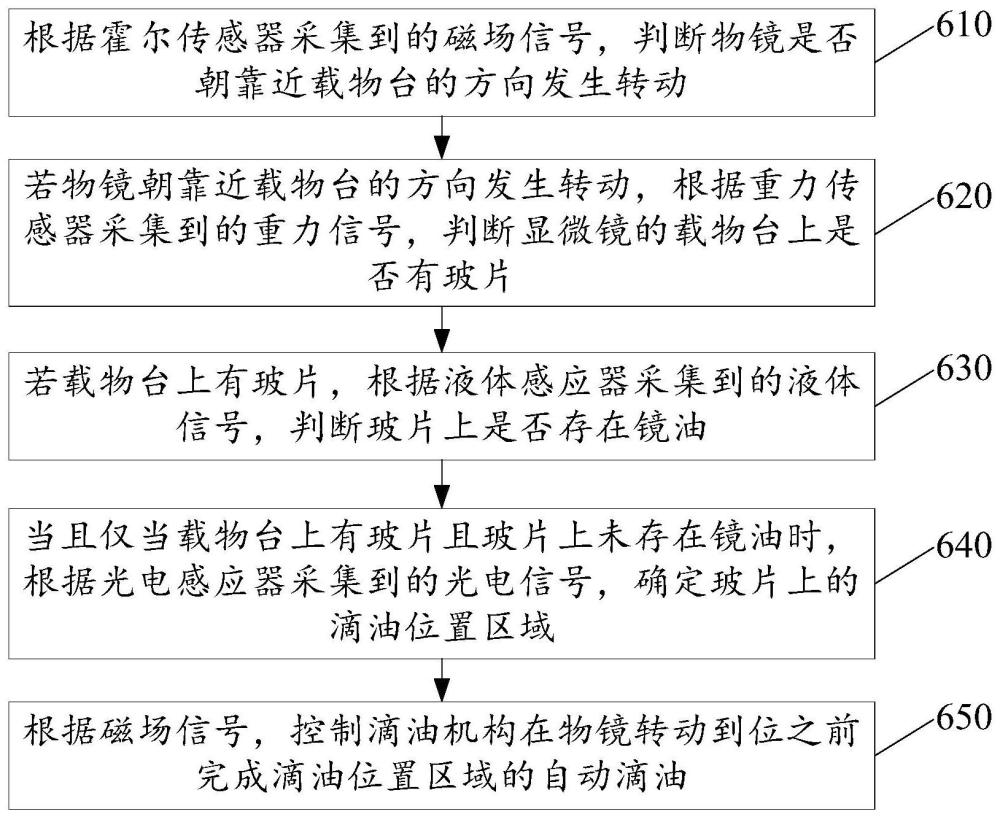
3、根据霍尔传感器采集到的磁场信号,判断物镜是否朝靠近载物台的方向发生转动;
4、若物镜朝靠近载物台的方向发生转动,根据重力传感器采集到的重力信号,判断显微镜的载物台上是否有玻片;
5、若载物台上有玻片,根据液体感应器采集到的液体信号,判断玻片上是否存在镜油;
6、当且仅当载物台上有玻片且玻片上未存在镜油时,根据光电感应器采集到的光电信号,确定玻片上的滴油位置区域;
7、根据所述磁场信号,控制滴油机构在物镜转动到位之前完成所述滴油位置区域的自动滴油;其中,物镜转动到位指的是物镜转动至载物台的正上方。
8、在一些实施例中,所述根据光电感应器采集到的光电信号,确定玻片上的滴油位置区域,包括:
9、将玻片划分为多个玻片区域,获取光电感应器采集到的每一玻片区域的光电信号;
10、根据每一玻片区域的光电信号,计算每一玻片区域的透光率;
11、确定出透光率低于指定透光率的目标玻片区域,根据目标玻片区域确定滴油位置区域。
12、在一些实施例中,根据目标玻片区域确定滴油位置区域,包括:
13、判断目标玻片区域的数量是否为多个;
14、若目标玻片区域的数量为多个,且存在至少两个目标玻片区域属于相邻接的区域,将相邻接的全部目标玻片区域确定为实验区域;
15、获取位于实验区域的中心位置的指定大小区域,标记为滴油位置区域。
16、在一些实施例中,所述方法还包括:
17、若目标玻片区域的数量仅有一个,将该目标玻片区域标记为滴油位置区域。
18、在一些实施例中,所述根据所述磁场信号,控制滴油机构在物镜转动到位之前完成所述滴油位置区域的自动滴油,包括:
19、根据所述磁场信号,计算物镜与显微镜的载物台之间的实时距离;
20、当所述实时距离小于指定距离时,控制滴油机构启动自动滴油,以使滴油机构在物镜转动到位之前完成所述滴油位置区域的自动滴油。
21、本发明第二方面公开一种显微镜自动滴油控制装置,应用于自动滴油装置,所述自动滴油装置包括控制装置以及分别与控制装置通信连接的滴油机构、重力传感器、液体感应器、光电传感器和霍尔传感器,其中,所述重力传感器、所述液体感应器、所述光电传感器分别内嵌于显微镜的载物台上,所述霍尔传感器固定于显微镜的载物台上,物镜的外壁上设置有磁铁,所述霍尔传感器与所述磁铁配合感应;所述控制装置包括:
22、第一感应单元,用于根据霍尔传感器采集到的磁场信号,判断物镜是否朝靠近载物台的方向发生转动;
23、第二感应单元,用于在物镜朝靠近载物台的方向发生转动时,根据重力传感器采集到的重力信号,判断显微镜的载物台上是否有玻片;
24、第三感应单元,用于在载物台上有玻片时,根据液体感应器采集到的液体信号,判断玻片上是否存在镜油;
25、定位单元,用于当且仅当载物台上有玻片且玻片上未存在镜油时,根据光电感应器采集到的光电信号,确定玻片上的滴油位置区域;
26、执行单元,用于根据所述磁场信号,控制滴油机构在物镜转动到位之前完成所述滴油位置区域的自动滴油;其中,物镜转动到位指的是物镜转动至载物台的正上方。
27、在一些实施例中,所述定位单元包括:
28、获取子单元,用于将玻片划分为多个玻片区域,获取光电感应器采集到的每一玻片区域的光电信号;
29、计算子单元,用于根据每一玻片区域的光电信号,计算每一玻片区域的透光率;
30、第一确定子单元,用于确定出透光率低于指定透光率的目标玻片区域;
31、第二确定子单元,用于根据目标玻片区域确定滴油位置区域。
32、在一些实施例中,所述执行单元包括:
33、测距子单元,用于根据所述磁场信号,计算物镜与显微镜的载物台之间的实时距离;
34、启动子单元,用于在所述实时距离小于指定距离时,控制滴油机构启动自动滴油,以使滴油机构在物镜转动到位之前完成所述滴油位置区域的自动滴油。
35、本发明第三方面公开一种电子设备,包括存储有可执行程序代码的存储器以及与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,用于执行第一方面公开的显微镜自动滴油控制方法。
36、本发明第四方面公开一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序使得计算机执行第一方面公开的显微镜自动滴油控制方法。
37、本发明的有益效果在于,通过根据霍尔传感器采集到的磁场信号,判断物镜是否朝靠近载物台的方向发生转动,若发生转动,利用重力传感器识别载物台上是否有玻片以及利用液体传感器识别玻片上是否存在镜油,当且仅当载物台上有玻片且玻片上未存在镜油时,确定玻片上的滴油位置区域,并在物镜转动到位之前完成自动滴油,从而不仅能够根据物镜的转动情况判定是否需要滴油,而且可以判断玻片上是否存在镜油及定位滴油位置,在需要滴油时能够实现物镜到位前完全自动滴油,可以避免显微镜切换到物镜时再手动滴油的情况,使使用过程更加连贯顺畅,同时控制方法更加智能化、高效及准确,满足用户实际需求。
本文地址:https://www.jishuxx.com/zhuanli/20240618/25790.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表