一种海底试验矿区的预制方法与流程
- 国知局
- 2024-06-21 13:39:35
本发明涉及深海采矿,尤其是一种海底试验矿区的预制方法。
背景技术:
1、占地球面积71%的海洋,蕴藏着极其丰富的矿产资源。自大洋开采的法律问题已经解决,世界各国纷纷调整其海洋资源发展战略,加快海洋资源综合开发进程,国际上深海采矿商业化已见端倪,对国际海底矿区勘探申请迅速升温,我国急需发展深海采矿技术,以维护我国海洋矿产资源开发权益。
2、深海采矿系统的基本功能是在海底采集多金属结核等矿产资源,并将其提升输送到海面且运输到港口海岸,目前,国内外已经对深海采矿系统装备展开了一定的研究,针对锰结核、多金属硫化物、富钴结壳这三大矿种开展过了大量的理论分析与试验研究,并针对不同类型的矿物研制了多台系统装备,深海中多金属结核资源潜力巨大,富含新能源技术紧迫需要的钴、镍、铜、锰等金属资源,是深海矿产资源开发的首选目标,多金属结核一般为球形或椭球形,粒径在20~100mm之间,密度约2100kg/m3,呈半埋状态铺在海底沉积物表面,赋存于水深4500~6000m的海底。
3、在深海采矿设备实现深海原位开采前要进行多阶段的浅海试验,一步步的增加深度以验证系统的可靠性,然而浅海海底没有锰结核赋存,使得研究团队只能根据海流情况在试验海域船上直接抛洒模拟结核,这样的预制方式由于锰结核入水位置离海底较远,在下落过程中受海流影响很大,导致矿石落点不精确,预制的矿区断断续续,矿石分布均匀度不高,且在抛洒后需要水下机器人下潜确认矿区位置,无法形成高质量模拟预制矿区对深海采矿系统可靠性进行高效验证,增加了深海采矿系统浅海海试的试验时间和不确定性。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种海底试验矿区的预制方法,从而实现高质量模拟海底试验矿区,保证深海采矿系统浅海海试的试验效率及准确性。
2、本发明所采用的技术方案如下:
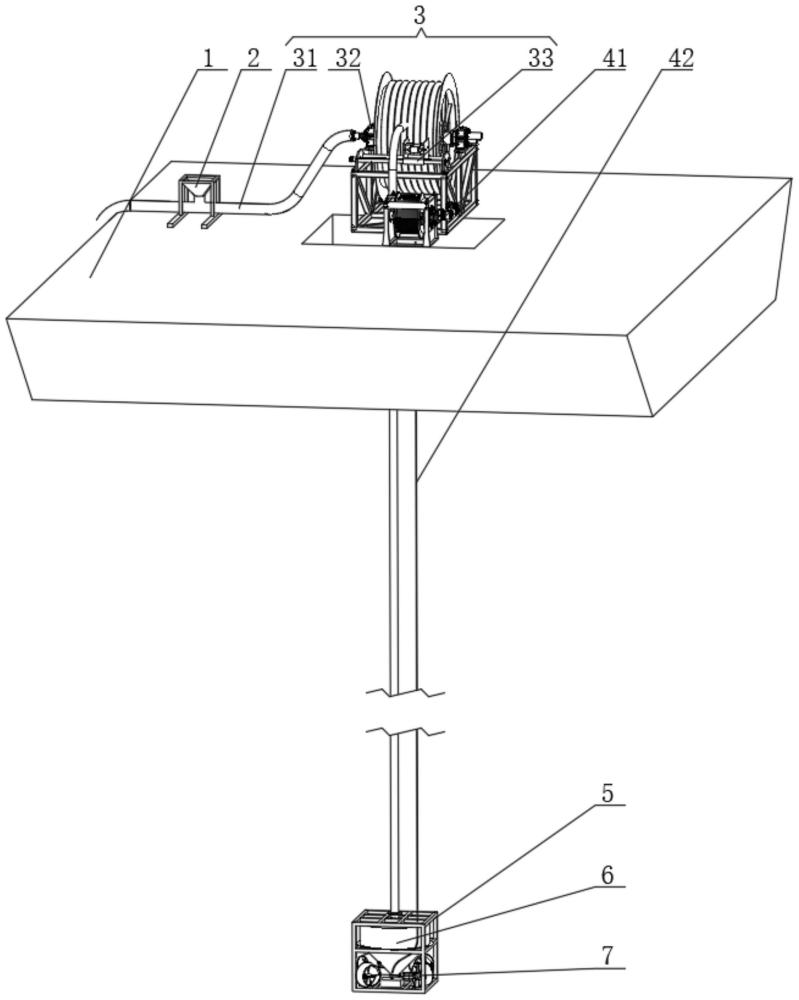
3、一种海底试验矿区的预制方法,包括位于所述试验矿区水面的船体、设置于所述船体上的矿石给料器,还包括与矿石给料器连接的给料管路系统,所述给料管路系统包括给料管组,所述给料管组的一端位于水面以下用于汲水,给料管组的另一端连接水下机器人,所述水下机器人上设置给料仓,所述给料仓与给料管组连通,所述给料仓的底部设置给料机,水下机器人上设置有定位装置;
4、预制方法包括以下步骤:
5、设定矿区参数:矿区参数包括试验矿区的位置、面积、矿石丰度;
6、布放水下机器人:给料管组的端部随着水下机器人的下潜向下延伸,直到水下机器人到达指定试验矿区上方;
7、矿石输送:启动给料管路系统的流体动力部件和矿石给料器,给料管组内灌入海水后混入来自矿石给料器的矿石,矿石由给料管组输送至给料仓并囤积于给料仓的底部;
8、制作矿区:开启给料机将给料仓中的矿石以恒定流量排出,同时水下机器人按照预定路径和预定速度行走,将矿石铺撒在海底形成设定矿石丰度的试验矿区。
9、其进一步技术方案在于:
10、所述给料仓为上部敞口的锥形壳体,所述锥形壳体的小端开口并安装所述给料机;
11、矿石输送步骤中,矿石和海水的混合物由给料管组输送至给料仓内后,矿石囤积于给料仓的底部,多余的海水从给料仓上部排出。
12、给料仓内设置矿石量检测部件;
13、制作矿区步骤中,矿石量检测部件检测给料仓内的矿石量位于最高量和最低量之间时,可进行矿石铺撒;当矿石量检测部件检测给料仓内的矿石量小于最低量式,停止矿石铺撒,所述定位装置将此时的水下机器人的位置反馈给控制系统。
14、制作矿区步骤中:水下机器人铺撒矿石时的行走路经包括长度相同且并排的多条一字型路线,相邻两个一字型路线的相邻端部齐平并通过转向路线相接,形成一条曲折路径,水下机器人沿一字型路线匀速行走的同时给料机工作,且给料机的铺撒宽度为相邻两条一字型路线的等效距离。
15、当水下机器人沿转向路线行走时,先减速后加速且给料机不工作,该过程中水下机器人由船体拖航,拖航方向垂直于一字型路线,拖航距离为铺撒宽度。
16、所述转向路线为半圆形弧线,转向路线的等效半径为铺撒宽度(b)的一半,当水下机器人沿转向路线行走时,水下机器人的线速度与沿一字型路线行走的速度相同,此时给料机工作。
17、所述水下机器人包括第一推进器、第二推进器、第三推进器和第四推进器,第一推进器、第二推进器、第三推进器和第四推进器均布于以给料机为中心的虚拟圆周上且推进方向均与所述虚拟圆周相切;
18、水下机器人沿一字型路线行走时,第一推进器和第三推进器的推进方向向相同,第二推进器和第三推进器不工作;
19、水下机器人沿转向路线行走时,第一推进器和第三推进器的推进方向和速度不变,第二推进器和第三推进器推进方向相反用于改变水下机器人的运动方向,使水下机器人的行走方向与半圆形弧线相切。
20、所述曲折路径行走过程中铺撒矿石形成单元矿区,设定矿区参数步骤中,根据矿区的形状将完整的试验矿区划分为多个单元矿区,制作矿区时,依次制作每个单元矿区。
21、所述给料管组包括第一管段和第二管段;
22、所述给料管路系统还包括安装于所述船体上的绞车组件,所述绞车组件的结构为:包括通过轴承座转动安装于所述船体上的转轴,所述转轴中设有空腔,所述转轴的一端安装有第二旋转接头,所述第二旋转接头与所述空腔连通,所述第二旋转接头与第一管段的端部连接,所述第一管段的另一端位于水面以下用于汲水;
23、所述转轴上安装有卷筒,所述卷筒用于盘绕所述第二管段,所述第二管段的一端固定于所述转轴上并与所述空腔连通,所述第二管段的另一端与所述给料仓连通。
24、所述矿石给料器的结构包括漏斗状的接料槽,所述接料槽的上端开口并连接有输送带,接料槽的下端通过管路与第一管段连通,第一管段上设置流体动力部件,所述流体动力部件位于所述矿石给料器和第二旋转接头之间。
25、本发明的有益效果如下:
26、本发明结构紧凑、合理,操作方便,通过给料管组以水流辅助输送来自矿石给料器的矿石,将矿石输送至水下的给料仓后,再采用给料机将给料仓缓存的矿石以恒定流量排出,结合水下机器人的行走控制,保证铺撒的矿石丰度符合要求,从而实现高质量模拟海底试验矿区,保证深海采矿系统浅海海试的试验效率及准确性。
27、同时,本发明还存在如下优势:
28、(1)矿石量检测部件用于检测给料仓中是否有足够的矿石,可以为光电传感器,当矿石量不足时,停止矿石铺撒,但此时水下机器人需要减速停止,通过定位装置反馈停止矿石铺撒时的位置并记忆,使矿石量恢复后继续从停止矿石铺撒时的位置进行矿石铺撒,提高试验矿区的连续性。
29、(2)结合恒定流量的给料仓,通过水下机器人沿并排的多条一字型路线匀速行走,实现设定区域内均匀铺撒矿石,进行一定矿石丰度的矿区的精确预制。
30、(3)通过四个推进器组合以简单的结构实现水下机器人在自身动力机构的驱动下按照预定路线匀速运动和转向,降低成本。
31、(4)通过设定单元矿区的大小和数量及排布方式,将试验矿区进行分块制作,实现大面积不规则试验矿区的精确预制,快速便捷。
32、(5)通过在绞车组件的转轴上设置空腔,将给料管组中的第一管段通过第二旋转接头与空腔连通,将给料管组中的第二管段的端头与空腔固定连接,使第二管段布放过程中第一管段不受绞车转动影响,便于管路和相关部件布置,简化设备整体结构。
本文地址:https://www.jishuxx.com/zhuanli/20240618/33743.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表