一种基于ESP32控制的智能运动装置的制作方法
- 国知局
- 2024-06-21 13:55:43
本技术涉及教学仪器,尤其涉及一种基于esp32控制的智能运动装置。
背景技术:
1、随着机器人技术的快速持续发展。现在各大学机器人研究机构都在开展关于机器人的实验学习系统。智能机器人是利用单片机、微型电机及多种传感器组成的小型运动机器。目前市面所出售的智能机器人,大多选用价格偏高的零件与电机,且控制芯片普遍采用功能强大、复杂的芯片实现控制功能,成本较高,初学者不易上手。而且,在机器人学习实验过程中会涉及各种功能的组合实验效果验证,教学过程需要单独配置各种功能模块,过程繁琐,不易实现。因此,如何提供一种能够对不同程度学习者进行匹配教学,而且能够方便组合多个不同功能模块实现不同的实验效果的智能运动教学仪器,对机器人的教学和研究具有重要意义。
技术实现思路
1、为解决上述技术问题,本实用新型提供了一种能够对不同程度学习者进行匹配教学,而且能够方便组合多个不同功能模块实现不同的实验效果的基于esp32控制的智能运动装置。
2、本实用新型采用如下技术方案:
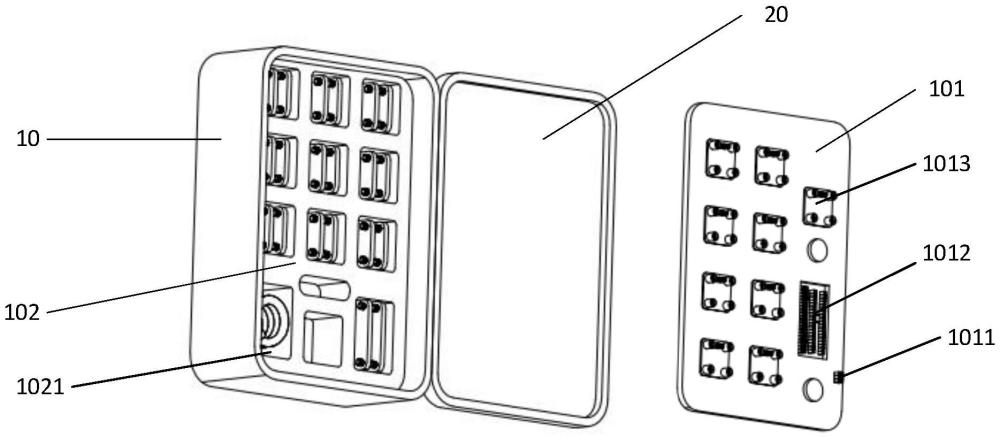
3、一种基于esp32控制的智能运动装置,包括智能机器人车体、连接线、扩展电路板、基础应用实验模块、箱体和与所述箱体一侧铰接连接的箱盖,所述箱体包括上层操作面板和下层箱式结构,所述上层操作面板上设置有用于连接电源的供电接口、用于连接基础应用实验模块的标准接口和用于连接扩展电路板的安装插槽,所述扩展电路板上设置有esp32接口和树莓派接口,用于连接esp32控制器和树莓派,以为基于esp32控制的智能运动装置提供主控功能,所述下层箱式结构内开设有容纳腔,所述容纳腔用于容纳智能机器人车体、连接线、扩展电路板以及基础应用实验模块。
4、可选地,所述基础应用实验模块至少包括彩色led模块、电机模块、红外避障传感器模块、超声波传感器模块、图像采集模块、光敏传感器模块、wifi模块、蓝牙模块、rfid模块和气体模块中的一种或多种。
5、可选地,所述智能机器人车体包括底部电路板和设置在所述底部电路板上的循迹传感器模块、红外传感器模块、电机连接架、四个电机组件以及四个驱动轮,电机连接架固定安装在底部电路板,四个电机组件固定安装在电机连接架上,且对称设置在底部电路板的左右两侧,每一电机组件的输出端固定连接一个驱动轮。
6、可选地,在底部电路板左右两侧的位于前方的电机组件内安装有编码器。
7、可选地,所述底部电路板包括底部主电路板和底部前置电路板,所述底部主电路板前端和底部前置电路板后端固定连接,所述循迹传感器模块设置在所述底部前置电路板的下表面,所述红外传感器模块、电机连接架、四个电机组件设置在所述底部主电路板。
8、可选地,所述循迹传感器模块包括五组红外寻迹避障探头,两组红外寻迹避障探头设置在底部前置电路板的左右两侧,用于在迷宫地面进行路径边缘检测,三组红外寻迹避障探头等间隔设置在底部前置电路板的中间区域,用于在迷宫地面进行引导线检测。
9、可选地,所述上层操作面板上还设置有功能扩展接口。
10、可选地,不同类型的标准接口采用不同颜色进行标记或设置为不同颜色。
11、与现有技术相比,本实用新型技术方案主要的优点如下:
12、本实用新型提供的基于esp32控制的智能运动装置,采用模块化设置,方便拆装;集成丰富的标准接口,可组合多个模块实现不同实验效果;能够实现核心处理器更换,可以实现对主流处理器构架嵌入式教学,对不同程度学习者进行匹配教学,便于教学。
13、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
技术特征:1.一种基于esp32控制的智能运动装置,其特征在于,包括智能机器人车体、连接线、扩展电路板、基础应用实验模块、箱体和与所述箱体一侧铰接连接的箱盖,所述箱体包括上层操作面板和下层箱式结构,所述上层操作面板上设置有用于连接电源的供电接口、用于连接基础应用实验模块的标准接口和用于连接扩展电路板的安装插槽,所述扩展电路板上设置有esp32接口和树莓派接口,用于连接esp32控制器和树莓派,以为基于esp32控制的智能运动装置提供主控功能,所述下层箱式结构内开设有容纳腔,所述容纳腔用于容纳智能机器人车体、连接线、扩展电路板以及基础应用实验模块。
2.如权利要求1所述的基于esp32控制的智能运动装置,其特征在于,所述基础应用实验模块至少包括彩色led模块、电机模块、红外避障传感器模块、超声波传感器模块、图像采集模块、光敏传感器模块、wifi模块、蓝牙模块、rfid模块和气体模块中的一种或多种。
3.如权利要求1所述的基于esp32控制的智能运动装置,其特征在于,所述智能机器人车体包括底部电路板和设置在所述底部电路板上的循迹传感器模块、红外传感器模块、电机连接架、四个电机组件以及四个驱动轮,电机连接架固定安装在底部电路板,四个电机组件固定安装在电机连接架上,且对称设置在底部电路板的左右两侧,每一电机组件的输出端固定连接一个驱动轮。
4.如权利要求3所述的基于esp32控制的智能运动装置,其特征在于,在底部电路板左右两侧的位于前方的电机组件内安装有编码器。
5.如权利要求3所述的基于esp32控制的智能运动装置,其特征在于,所述底部电路板包括底部主电路板和底部前置电路板,所述底部主电路板前端和底部前置电路板后端固定连接,所述循迹传感器模块设置在所述底部前置电路板的下表面,所述红外传感器模块、电机连接架、四个电机组件设置在所述底部主电路板。
6.如权利要求5所述的基于esp32控制的智能运动装置,其特征在于,所述循迹传感器模块包括五组红外寻迹避障探头,两组红外寻迹避障探头设置在底部前置电路板的左右两侧,用于在迷宫地面进行路径边缘检测,三组红外寻迹避障探头等间隔设置在底部前置电路板的中间区域,用于在迷宫地面进行引导线检测。
7.如权利要求1所述的基于esp32控制的智能运动装置,其特征在于,所述上层操作面板上还设置有功能扩展接口。
8.如权利要求1-7任一项所述的基于esp32控制的智能运动装置,其特征在于,不同类型的标准接口采用不同颜色进行标记或设置为不同颜色。
技术总结本技术公开一种基于ESP32控制的智能运动装置,包括智能机器人车体、连接线、扩展电路板、基础应用实验模块、箱体和与箱体一侧铰接连接的箱盖,箱体包括上层操作面板和下层箱式结构,上层操作面板上设置供电接口、连接基础应用实验模块的标准接口和扩展电路板的安装插槽,扩展电路板上设置ESP32接口和树莓派接口,用于连接ESP32控制器和树莓派,为智能运动装置提供主控功能,下层箱式结构内开设容纳腔,用于容纳智能机器人车体、连接线、扩展电路板以及基础应用实验模块。本技术采用模块化设置,方便拆装;集成丰富的标准接口,可组合多个模块实现不同实验效果;能够实现核心处理器更换,可以实现对主流处理器构架嵌入式教学,便于教学。技术研发人员:严靖怡,宋立红受保护的技术使用者:天津启诚伟业科技有限公司技术研发日:20230928技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240618/35150.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表