模拟机器人操作的系统及方法与流程
- 国知局
- 2024-06-21 14:08:47
本发明涉及虚拟训练,并且更特定来说涉及模拟机器人操作的系统及方法。
背景技术:
1、用于模拟例如焊接、铜焊、粘合剂结合及/或其它接合操作的接合操作的常规系统及方法需要大量使用图形处理单元(gpu)来执行模拟。在常规焊接模拟系统中,模拟焊珠的计算及渲染需要大量计算能力,借此限制可在其上有效实施此模拟的平台。例如,移动装置及/或网络浏览器无法实施常规模拟。此外,常规焊接模拟系统及方法麻烦,并且在开发例如复杂的焊接形状及/或模拟不同焊接材料的新特征及功能性方面存在困难。
2、在常规焊接模拟中,不能准确地建模从填充物(例如用于smaw焊接工艺的电极)转移到焊珠的材料量。准确建模对于模拟多道焊接中的根部焊道(root pass)非常重要,这是因为根部焊道为其余焊道打下基础。当焊接部件之间没有间隔时,根部焊道填满太多空间。在许多情况下,珠几何形状可能太凸或太凹,从而使后续焊道配合得很差。摆动焊接(weaved weld)可产生看起来太平的珠。如果在同一位置执行焊接(即,大体上不推进炬或焊接枪),那么焊珠可垂直生长。在某一情况下,试样及焊珠之间可能没有过渡。举例来说,珠看起来像被粘在试样上。
3、在常规的焊接模拟中,很难准确地模拟基础工件材料及/或底层焊珠的熔化。特定来说,gtaw焊接工艺的常规模拟缺乏此能力。
技术实现思路
1、揭示用以模拟机器人接合操作的系统及方法,大体上如由图式中的至少一者说明并结合图式中的至少一者描述,如在权利要求书中更完整地阐述。
技术特征:1.一种用以模拟机器人应用的系统,所述系统包括:
2.根据权利要求1所述的系统,其中所述模拟器经配置以基于解译所述捕获图像中的视觉标记来确定一或多个焊接参数,并且基于所述一或多个焊接参数来计算所述模拟结果。
3.根据权利要求1所述的系统,其中所述模拟器经配置以基于由所述机器人臂输出的所述通信来确定一或多个焊接参数。
4.根据权利要求1所述的系统,其进一步包括经配置以将来自所述机器人臂的通信转换成模拟器通信格式的机器人解译器。
5.根据权利要求4所述的系统,其中来自所述机器人臂的所述通信包括标准化现场总线格式。
6.根据权利要求1所述的系统,其进一步包括经配置以对所述机器人臂进行编程以执行所述模拟操作的机器人控制器。
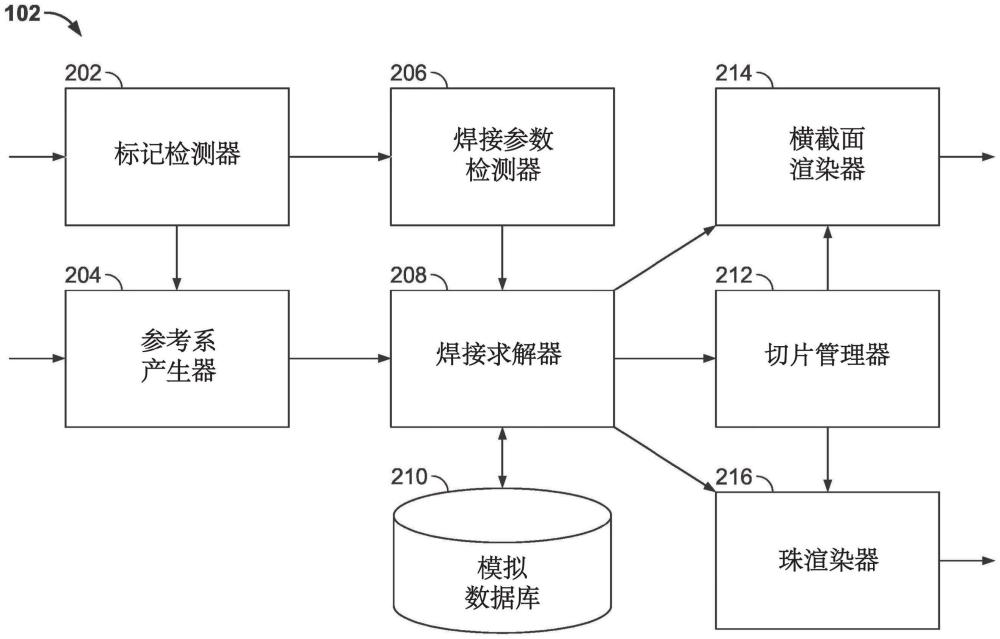
7.根据权利要求1所述的系统,其中所述模拟器经配置以针对模拟域的离散切片计算所述模拟结果,所述离散切片包括所述工件的相应横截面。
8.根据权利要求1所述的系统,其中使用所述机器人臂的焊接电力供应器接口将所述模拟器耦合到所述机器人臂。
9.根据权利要求1所述的系统,其中所述模拟器经配置以产生所述工件及所述工件上的接头的可视化,即在混合现实环境中的所述模拟操作期间或在完全数字化环境中的所述模拟操作之后中的至少一者。
10.根据权利要求9所述的系统,其中所述模拟器经配置以将所述模拟结果传输到远程装置,所述远程装置经配置以基于所述模拟结果来提供所述工件及所述接头的不同视角。
11.根据权利要求1所述的系统,其中所述模拟操作包括模拟焊接操作。
12.根据权利要求1所述的系统,其中所述模拟操作包括模拟接合操作。
13.根据权利要求1所述的系统,其中所述模拟操作包括模拟喷涂操作。
14.一种用以模拟机器人应用的方法,所述方法包括:
15.一种用以模拟机器人应用的系统,所述系统包括:
技术总结本发明揭示一种模拟机器人操作的系统及方法。用以模拟机器人应用的实例系统包含:图像传感器,其经配置以在模拟操作期间捕获由机器人臂操纵的物理模拟工件及物理模拟器具的图像;及模拟器,其经配置以:基于所述捕获图像并基于由所述机器人臂输出的通信来计算模拟结果;及输出所述模拟结果的视觉表示。技术研发人员:P·赫拉尔多·马基内斯·托雷西利亚,F·J·迪亚斯·卡诺受保护的技术使用者:西伯利解决方案公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240618/36246.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表