一种T梁模板打磨机器人的制作方法
- 国知局
- 2024-06-20 14:24:36
本发明涉及t梁模板加工,具体为一种t梁模板打磨机器人。
背景技术:
1、t梁模板在桥梁工程中起到至关重要的作用,特别是用于预应力混凝土t梁的生产。这种模板提供了t梁的外形轮廓和内部预应力钢筋的排列方式,确保t梁尺寸和结构的准确,t梁模板可以提高生产效率,加快t梁的制造速度,缩短工程周期,而且t梁模板通常具有较长的使用寿命,可以多次重复使用,提供成本效益。
2、t梁模板内壁打磨是一种常见的表面处理方法,尤其适用于模具制造和加工工艺中,内壁打磨可以有效地提高t梁模板内壁的表面平整度和精度,确保模板加工出的产品满足设计要求,减少后续加工的难度,打磨后的内壁表面可以减少空气或流体在t梁模板内部的阻力,提高流体通过的效率。
3、现有的t梁模板内壁一般采用打磨机进行打磨,这种打磨方式存在以下不足:1、由于t梁模板内壁的打磨面比较大,在进行打磨时,需要将打磨机压紧在t梁模板内壁的表面,通过打磨机带动打磨介质对t梁模板内壁进行打磨,打磨过程中需要不断的移动打磨机的位置,无论是打磨机本身的打磨作业,还是驱动打磨机进行压紧和移动,都需要额外的动力源,生产成本高,打磨效率慢。
4、2、随着对t梁模板内壁的打磨,打磨介质会逐渐发生磨损,打磨介质的厚度逐渐减小,由于t梁模板内壁不同部位的粗糙程度并不相同,所以打磨介质不同部位产生的磨损情况也不相同,打磨介质会出现凹凸不平的情况,现有的打磨介质是整体压在t梁模板内壁表面进行打磨的,因此打磨介质不同的磨损部位与t梁模板内壁的贴紧程度是不一致的,导致对t梁模板内壁的打磨效果变差。
技术实现思路
1、为了解决上述问题,本发明提供了一种t梁模板打磨机器人,包括承载装置,所述承载装置的内部安装有打磨装置,所述打磨装置的后侧设置有驱动打磨装置前后移动的多级液压伸缩缸,所述多级液压伸缩缸安装在承载装置上。
2、所述打磨装置包括安装在承载装置中的支撑机构,所述支撑机构内部的左右两侧各滑动安装有一个压紧机构,所述支撑机构的中部上下滑动安装有推动压紧机构向外侧移动的施压机构,两个所述压紧机构对称分布在施压机构的左右两侧,所述压紧机构远离施压机构的一侧安装有一级自适应机构,所述一级自适应机构远离压紧机构的一侧安装有二级自适应机构,所述二级自适应机构远离一级自适应机构的一侧安装有打磨介质,所述支撑机构的后侧前后滑动安装有推动施压机构向下移动的传动机构。
3、所述支撑机构包括滑动安装在承载装置中为空心结构的连接板,所述连接板的内部开设有左右对称分布的两排第一斜槽。
4、所述压紧机构包括滑动安装在连接板内部的成倒l形的压紧板,所述压紧板的前后两侧固定连接有支撑杆,所述支撑杆与第一斜槽相匹配。
5、在一种可能实施的方式中,所述承载装置包括用来承载t梁模板的u形基座,所述u形基座内腔的底部固定连接有用来定位t梁模板的定位块,所述u形基座的后侧固定连接有用来安装多级液压伸缩缸的安装支架。
6、在一种可能实施的方式中,所述连接板的内部固定连接有十字块,所述第一斜槽远离施压机构的一端高度逐渐降低,所述连接板的顶部固定安装有上支撑板,所述上支撑板滑动安装在u形基座的顶部,所述连接板的底部固定连接有下支撑板,所述下支撑板滑动安装在u形基座的底部。
7、在一种可能实施的方式中,所述施压机构包括上下滑动安装在连接板内部的下压块,所述下压块的侧面固定连接有侧压杆,所述侧压杆关于下压块左右对称分布,所述侧压杆位于压紧板的顶部且与压紧板平行,所述下压块的内部开设有十字槽,所述十字块滑动安装在十字槽的内部。
8、在一种可能实施的方式中,所述压紧板远离一级自适应机构的一侧固定连接有推挤板,所述推挤板的内部开设有第三斜槽,所述第三斜槽远离下压块的一端高度逐渐升高,所述下压块和侧压杆的前后两侧均固定连接有第一压杆,所述第一压杆滑动安装在第三斜槽的内部。
9、在一种可能实施的方式中,所述传动机构包括位于连接板后侧的传动板一,所述传动板一上下两端均固定安装有传动板二,所述传动板二的前端滑动安装在连接板的内部,所述传动板二的内部固定连接有第二压杆,所述下压块的顶部和底部均固定安装有推挤块,所述推挤块的内部开设有第二斜槽,所述第二斜槽靠近传动机构的一端高度逐渐降低,所述第二压杆滑动安装在第二斜槽的内部。
10、在一种可能实施的方式中,所述一级自适应机构包括在压紧板远离推挤板一侧开设的活动槽,所述活动槽的内部滑动安装有活动板,所述活动板成倒l形结构,所述活动板靠近压紧板的一侧固定连接有第一弹簧,所述第一弹簧远离活动板的一端与压紧板固定连接。
11、在一种可能实施的方式中,所述二级自适应机构包括安装在活动板横向段的若干自适应组件一,所述自适应组件一位于t梁模板的顶部,所述活动板的弯折处安装有自适应组件二,所述活动板的竖向段安装有若干自适应组件三。
12、在一种可能实施的方式中,所述自适应组件一包括第一外壳体,所述第一外壳体远离t梁模板的一侧滑动安装有第一内壳体,所述第一外壳体与第一内壳体之间通过第二弹簧连接,所述第一外壳体远离对应自适应组件二的一侧固定连接有第一t形块,所述第一外壳体靠近对应自适应组件二的一侧开设有第一t形槽,所述第一t形块与第一t形槽相匹配,所述第一外壳体靠近t梁模板的一侧固定安装打磨介质,所述自适应组件一与自适应组件三结构相同。
13、在一种可能实施的方式中,所述自适应组件二包括第二外壳体,所述第二外壳体远离t梁模板的一侧滑动安装有第二内壳体,所述第二外壳体和第二内壳体之间固定连接有第三弹簧,所述第二外壳体靠近t梁模板的一侧为圆弧面且与t梁模板的圆角处相匹配,所述第二外壳体的圆弧面上固定安装打磨介质。
14、本发明的有益效果:1、本发明通过单一驱动源多级液压伸缩缸控制打磨装置移动进行打磨,同时通过支撑机构、施压机构、压紧机构和传动机构的联动配合,在打磨装置向前移动的同时,能够对打磨介质施加向下和向外的压力,将打磨介质紧贴到t梁模板的表面,不需要额外的驱动源进行驱动,降低了生产成本,打磨装置能够同时对t梁模板上侧壁和内侧壁进行打磨,提高了打磨的效率。
15、2、本发明通过一级自适应机构和二级自适应机构的配合使用,在压紧机构将打磨介质压紧到t梁模板的表面时,一级自适应机构和二级自适应机构能够起到自适应调节的作用,随着打磨介质的逐渐磨损,通过一级自适应机构和二级自适应机构的伸缩形变将打磨介质始终压紧在t梁模板的表面,保持打磨介质对t梁模板的有效打磨,同时二级自适应机构采用多段式设计,能够分别对不同部位的打磨介质进行自适应调节,能够使不同部位、不同磨损程度的打磨介质都能够与t梁模板的表面进行有效的贴合打磨,避免出现打磨介质由于磨损程度不同而与t梁模板表面贴合不一致的情况,提高了对t梁模板打磨的效果。
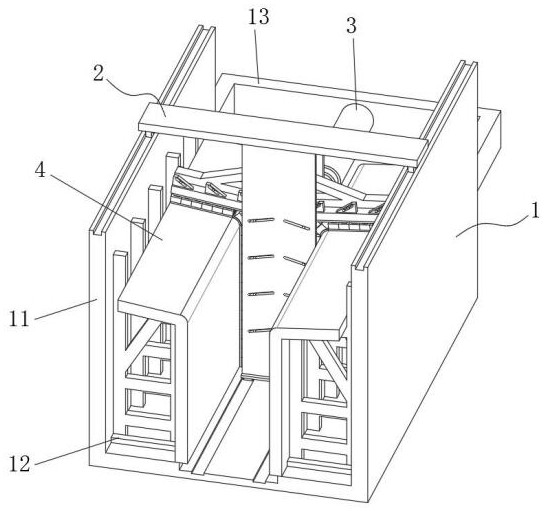
技术特征:1.一种t梁模板打磨机器人,包括,其特征在于:一种t梁模板打磨机器人,包括承载装置(1),所述承载装置(1)的内部安装有打磨装置(2),所述打磨装置(2)的后侧设置有驱动打磨装置(2)前后移动的多级液压伸缩缸(3),所述多级液压伸缩缸(3)安装在承载装置(1)上;
2.根据权利要求1所述的一种t梁模板打磨机器人,其特征在于:所述承载装置(1)包括用来承载t梁模板(4)的u形基座(11),所述u形基座(11)内腔的底部固定连接有用来定位t梁模板(4)的定位块(12),所述u形基座(11)的后侧固定连接有用来安装多级液压伸缩缸(3)的安装支架(13)。
3.根据权利要求2所述的一种t梁模板打磨机器人,其特征在于:所述连接板(211)的内部固定连接有十字块(213),所述第一斜槽(212)远离施压机构(22)的一端高度逐渐降低,所述连接板(211)的顶部固定安装有上支撑板(214),所述上支撑板(214)滑动安装在u形基座(11)的顶部,所述连接板(211)的底部固定连接有下支撑板(215),所述下支撑板(215)滑动安装在u形基座(11)的底部。
4.根据权利要求3所述的一种t梁模板打磨机器人,其特征在于:所述施压机构(22)包括上下滑动安装在连接板(211)内部的下压块(221),所述下压块(221)的侧面固定连接有侧压杆(222),所述侧压杆(222)关于下压块(221)左右对称分布,所述侧压杆(222)位于压紧板(231)的顶部且与压紧板(231)平行,所述下压块(221)的内部开设有十字槽(224),所述十字块(213)滑动安装在十字槽(224)的内部,所述压紧机构(23)对称分布在施压机构(22)的左右两侧。
5.根据权利要求4所述的一种t梁模板打磨机器人,其特征在于:所述压紧板(231)远离一级自适应机构(24)的一侧固定连接有推挤板(233),所述推挤板(233)的内部开设有第三斜槽(234),所述第三斜槽(234)远离下压块(221)的一端高度逐渐升高,所述下压块(221)和侧压杆(222)的前后两侧均固定连接有第一压杆(223),所述第一压杆(223)滑动安装在第三斜槽(234)的内部。
6.根据权利要求4所述的一种t梁模板打磨机器人,其特征在于:所述传动机构(26)包括位于连接板(211)后侧的传动板一(261),所述传动板一(261)上下两端均固定安装有传动板二(262),所述传动板二(262)的前端滑动安装在连接板(211)的内部,所述传动板二(262)的内部固定连接有第二压杆(263),所述下压块(221)的顶部和底部均固定安装有推挤块(225),所述推挤块(225)的内部开设有第二斜槽(226),所述第二斜槽(226)靠近传动机构(26)的一端高度逐渐降低,所述第二压杆(263)滑动安装在第二斜槽(226)的内部。
7.根据权利要求5所述的一种t梁模板打磨机器人,其特征在于:所述一级自适应机构(24)包括在压紧板(231)远离推挤板(233)一侧开设的活动槽(241),所述活动槽(241)的内部滑动安装有活动板(242),所述活动板(242)成倒l形结构,所述活动板(242)靠近压紧板(231)的一侧固定连接有第一弹簧(243),所述第一弹簧(243)远离活动板(242)的一端与压紧板(231)固定连接。
8.根据权利要求7所述的一种t梁模板打磨机器人,其特征在于:所述二级自适应机构(25)包括安装在活动板(242)横向段的若干自适应组件一(251),所述自适应组件一(251)位于t梁模板(4)的顶部,所述活动板(242)的弯折处安装有自适应组件二(252),所述活动板(242)的竖向段安装有若干自适应组件三(253)。
9.根据权利要求8所述的一种t梁模板打磨机器人,其特征在于:所述自适应组件一(251)包括第一外壳体(2511),所述第一外壳体(2511)远离t梁模板(4)的一侧滑动安装有第一内壳体(2512),所述第一外壳体(2511)与第一内壳体(2512)之间通过第二弹簧(2513)连接,所述第一外壳体(2511)远离对应自适应组件二(252)的一侧固定连接有第一t形块(2514),所述第一外壳体(2511)靠近对应自适应组件二(252)的一侧开设有第一t形槽(2515),所述第一t形块(2514)与第一t形槽(2515)相匹配,所述第一外壳体(2511)靠近t梁模板(4)的一侧固定安装打磨介质(27),所述自适应组件一(251)与自适应组件三(253)结构相同。
10.根据权利要求8所述的一种t梁模板打磨机器人,其特征在于:所述自适应组件二(252)包括第二外壳体(2521),所述第二外壳体(2521)远离t梁模板(4)的一侧滑动安装有第二内壳体(2522),所述第二外壳体(2521)和第二内壳体(2522)之间固定连接有第三弹簧(2523),所述第二外壳体(2521)靠近t梁模板(4)的一侧为圆弧面且与t梁模板(4)的圆角处相匹配,所述第二外壳体(2521)的圆弧面上固定安装打磨介质(27)。
技术总结本发明涉及T梁模板加工领域,具体为一种T梁模板打磨机器人,包括承载装置,所述承载装置的内部安装有打磨装置,所述打磨装置的后侧设置有驱动打磨装置前后移动的多级液压伸缩缸,所述多级液压伸缩缸安装在承载装置上。本发明通过单一驱动源多级液压伸缩缸控制打磨装置向前移动进行打磨,同时通过支撑机构、施压机构、压紧机构和传动机构的联动配合,在打磨装置向前移动的同时,能够对打磨介质施加向下和向外的压力,将打磨介质紧贴到T梁模板的表面,不需要额外的驱动源进行驱动,降低了生产成本,且打磨装置能够同时对T梁模板上侧壁和内侧壁进行打磨,提高了打磨的效率。技术研发人员:梁超,张建,马慧娟,沈翔,罗升,汪泽荃,陈浩军受保护的技术使用者:中铁四局集团有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240619/10215.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表