一种除锈执行机构及自动除锈机器人的制作方法
- 国知局
- 2024-06-20 14:42:46
本发明涉及船底坞墩区域除锈的,具体涉及一种除锈执行机构及自动除锈机器人。
背景技术:
1、海上各种船舶及钻井平台,在海上使用一段时间,船壳就会附上一层很厚的海洋生物,船壳板也会受到海水腐蚀,船壳板慢慢生锈,并且随着时间推移,腐蚀会愈加严重。因此,船舶及钻井平台都要在运营一段时间后返厂除锈油漆保养,以免严重腐蚀。
2、目前很多船厂都已经从传统的打砂除锈转变为使用超高压水除锈,利用高压水直接将船壳上的海洋生物及锈蚀部分冲洗掉,并且随着除锈装备的普及应用,慢慢从手工作业向机械化发展,出现了自动除锈机器人。
3、但现有的自动除锈机器人自动化程度较低,并且不具备污水回收装置,喷出的高压水以及冲洗掉的杂质直接散落到地面上,一是造成了水资源的浪费,二是后续还需要对地面杂质再次进行收集清理,增加用工成本。
技术实现思路
1、本发明的目的在于提供一种除锈执行机构及自动除锈机器人,增设了污水回收模块,以解决上述背景技术中的问题。
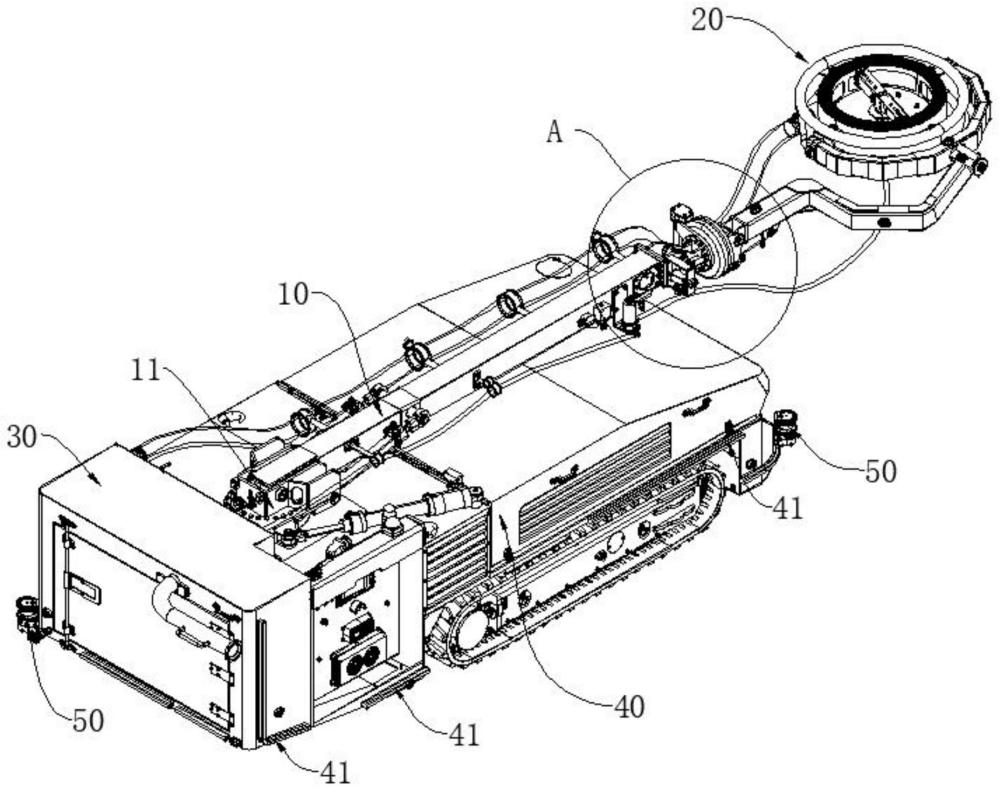
2、为实现上述目的,本发明采用的技术方案是提供一种除锈执行机构,包括大臂组件、喷盘执行组件和污水回收组件,大臂组件一端铰接于车体上,且能够沿水平方向和竖直方向转动;喷盘执行组件包括第一支架、第二支架和喷盘件,所述大臂组件、所述第一支架和所述第二支架依次连接,所述喷盘件设置在所述第二支架上且转动连接于所述第二支架,所述喷盘件呈凹槽状,所述喷盘件上设有喷头;污水回收组件包括收集箱和抽吸动力件,所述收集箱与所述喷盘件通过管路连接,所述喷盘件贴合船壳的外壁,所述抽吸动力件使得所述喷盘件产生负压吸力,所述喷盘件将承接的污水抽吸至所述收集箱内。
3、进一步地,所述大臂组件的一端设有安装座,所述大臂组件在竖直方向转动连接于所述安装座,所述安装座在水平方向转动连接于车体。
4、进一步地,所述大臂组件呈长条状,所述大臂组件另一端的端部转动连接有所述第一支架,所述第二支架呈半环状,所述喷盘件嵌入所述第二支架的内环且两侧转动连接于所述第二支架,所述第二支架转动连接于所述第一支架。
5、进一步地,所述喷盘件的顶部呈敞口设置,所述喷盘件的顶部适于贴合于船壳的外壁,所述喷盘件的底部中心设有进水口,所述喷盘件底部中心设有旋转动力件,所述旋转动力件连接有所述喷头,所述喷头与所述进水口相连通,所述进水口连接有水源。
6、进一步地,所述喷头呈长条状,所述喷头上排列有若干喷嘴,所述旋转动力件驱动所述喷头转动。
7、进一步地,所述污水回收组件还包括铰刀和过滤分离器,所述过滤分离器和所述铰刀均设于所述收集箱内,所述铰刀对杂质进行粉碎,所述过滤分离器将大颗粒杂质进行过滤拦截。
8、进一步地,所述过滤后的水通过管路流入至所述喷盘件。
9、进一步地,本申请还提供一种自动除锈机器人,包括车体,所述车体上设有上述所述的除锈执行机构,所述大臂组件的一端铰接在所述车体上,所述收集箱可拆卸地设于所述车体的尾端。
10、进一步地,自动除锈机器人还包括激光雷达,至少在所述车体的前端和所述车体的尾端对角位置设有所述激光雷达,所述激光雷达为室外型雷达。
11、进一步地,自动除锈机器人还包括超声波雷达,所述车体及所述除锈执行机构上设有若干个超声波雷达,所述车体的外周设有防撞条。
12、本发明的有益效果在于:
13、1、大臂组件能够沿水平方向和竖直方向转动,实现喷盘件的位置调整。喷盘件转动连接于第二支架,喷盘件可以进行转动调整以适应贴合船壳的侧壁。喷盘件喷出的高压水可以对船壳表面的附着物进行清理,清理后的废水和杂质,通过抽吸动力件的负压吸力可以直接经喷盘件抽吸至收集箱内收集。本申请中的除锈执行机构包括污水回收组件,对船壳进行高压水冲洗时可以直接将废水和杂质进行收集,避免散落在地面上导致后续清理和污染。并且还可以多个除锈执行机构同时自动作业,极大的提升超高压水除锈效率,减少操作工人,安全可靠,降本增效,节能环保。
14、2、大臂组件另一端的端部转动连接有第一支架,通过第一支架的转动,可以带动第二支架和喷盘件的转动调整,实现喷盘件的敞口端位置调整,方便贴合于船壳的表面外壁。
15、3、喷盘件的底部中心设有进水口,喷盘件底部中心设有旋转动力件,旋转动力件连接有喷头,喷头与进水口相连通,进水口连接有水源。喷头呈长条状,喷头上排列有若干喷嘴,旋转动力件带动喷头转动,喷头转动的区域内所对应的船壳表面均能进行有效清理,提高船壳的清理效率。
16、4、污水回收组件还包括铰刀和过滤分离器,过滤分离器和铰刀均设于收集箱内,铰刀对杂质进行粉碎,方便杂质的后续处理。过滤分离器将大颗粒杂质进行过滤拦截,方便回收水进行循环冲洗利用。
技术特征:1.一种除锈执行机构,其特征在于,包括:
2.如权利要求1所述的除锈执行机构,其特征在于,所述大臂组件(10)的一端设有安装座(11),所述大臂组件(10)在竖直方向转动连接于所述安装座(11),所述安装座(11)在水平方向转动连接于车体(40)。
3.如权利要求1所述的除锈执行机构,其特征在于,所述大臂组件(10)呈长条状,所述大臂组件(10)另一端的端部转动连接有所述第一支架(21),所述第二支架(22)呈半环状,所述喷盘件(23)嵌入所述第二支架(22)的内环且两侧转动连接于所述第二支架(22),所述第二支架(22)转动连接于所述第一支架(21)。
4.如权利要求1所述的除锈执行机构,其特征在于,所述喷盘件(23)的顶部呈敞口设置,所述喷盘件(23)的顶部适于贴合于船壳的外壁,所述喷盘件(23)的底部中心设有进水口(232),所述喷盘件(23)底部中心设有旋转动力件,所述旋转动力件连接有所述喷头(231),所述喷头(231)与所述进水口(232)相连通,所述进水口(232)连接有水源。
5.如权利要求4所述的除锈执行机构,其特征在于,所述喷头(231)呈长条状,所述喷头(231)上排列有若干喷嘴(233),所述旋转动力件驱动所述喷头(231)转动。
6.如权利要求1所述的除锈执行机构,其特征在于,所述污水回收组件(30)还包括铰刀和过滤分离器,所述过滤分离器和所述铰刀均设于所述收集箱(31)内,所述铰刀对杂质进行粉碎,所述过滤分离器将大颗粒杂质进行过滤拦截。
7.如权利要求6所述的除锈执行机构,其特征在于,所述过滤后的水通过管路流入至所述喷盘件(23)。
8.一种自动除锈机器人,包括车体(40),其特征在于,所述车体(40)上设有权利要求1-7中任意一项所述的除锈执行机构,所述大臂组件(10)的一端铰接在所述车体(40)上,所述收集箱(31)可拆卸地设于所述车体(40)的尾端。
9.如权利要求8所述的自动除锈机器人,其特征在于,还包括激光雷达(50),至少在所述车体(40)的前端和所述车体(40)的尾端对角位置设有所述激光雷达(50),所述激光雷达(50)为室外型雷达。
10.如权利要求8所述的自动除锈机器人,其特征在于,还包括超声波雷达,所述车体(40)及所述除锈执行机构上设有若干个超声波雷达,所述车体(40)的外周设有防撞条(41)。
技术总结本发明涉及船底坞墩区域除锈的技术领域,具体涉及除锈执行机构及自动除锈机器人,除锈执行机构,包括大臂组件、喷盘执行组件和污水回收组件,大臂组件一端铰接于车体上,且能够沿水平方向和竖直方向转动;喷盘执行组件包括第一支架、第二支架和喷盘件,大臂组件、第一支架和第二支架依次连接,喷盘件设置在第二支架上且转动连接于第二支架,喷盘件呈凹槽状,喷盘件上设有喷头;污水回收组件包括收集箱和抽吸动力件,收集箱与喷盘件通过管路连接,喷盘件贴合船壳的外壁,抽吸动力件使得喷盘件产生负压吸力,喷盘件将承接的污水抽吸至收集箱内。污水回收组件可以直接将废水和杂质进行收集,避免散落在地面上导致后续清理和污染。技术研发人员:舒泓文,陈远刚,刘鹤,张专,周庆伟,钟立雄,董航受保护的技术使用者:友联船厂(蛇口)有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240619/10769.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表