一种长隧洞水下检测清理机器人的制作方法
- 国知局
- 2024-07-17 12:44:45
本技术涉及水下检测清理,具体为一种长隧洞水下检测清理机器人。
背景技术:
1、随着世界水利工程的不断发展,建成的水利水电、核电等长大引水隧洞工程众多,这些隧洞都普遍口径大、洞线长等特点,常年运行洞中势必会出现裂缝、坍塌、生物附着等缺陷,不及时检测清理会严重影响到设备的正常运行,造成难以挽回的损失。
2、常规的处理方法一般是放空检测和清理,但是存在成本高,效率低下等问题。有些隧洞甚至不能放空检测清理,满水隧洞存在水压高、流速快、弱光等现象,复杂水下条件对人工清理存在安全隐患。随着科技发展,人们对安全意识的不断提高,用机器代替人力工作已经发展为一种趋势,水下机器人在此等条件作业具有得天独厚的优势,但是长距离的隧洞检测和清理仍然是目前急需突破的方向。
技术实现思路
1、本实用新型的目的在于提供一种长隧洞水下检测清理机器人,以解决上述背景技术中提出的问题。
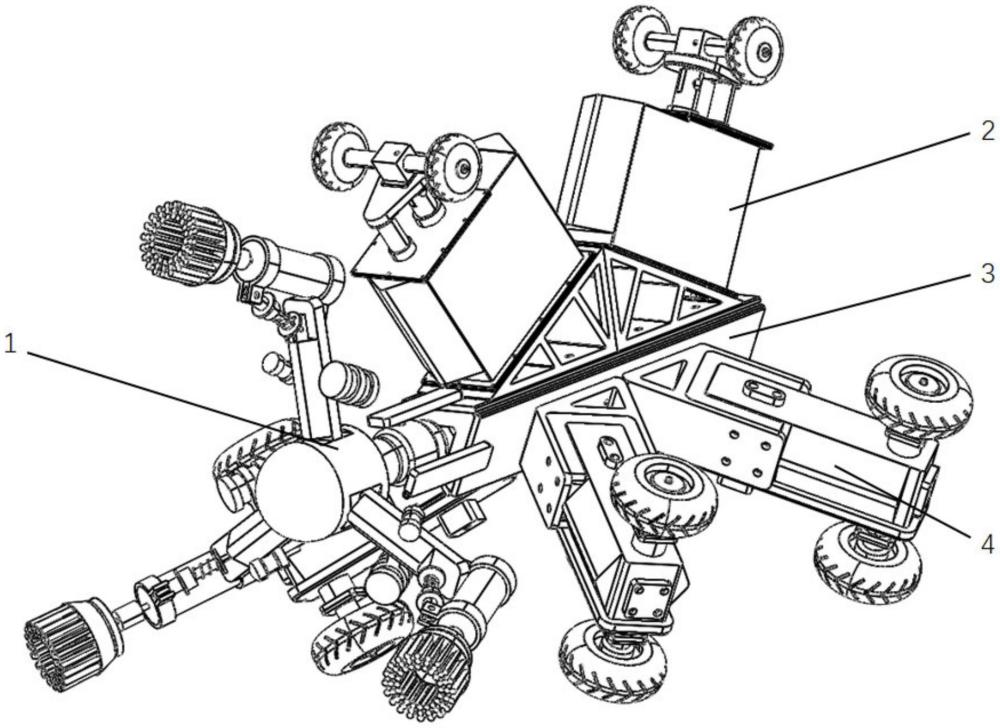
2、为实现上述目的,本实用新型提供如下技术方案:一种长隧洞水下检测清理机器人,包括旋转清理部件、辅助支撑部件、控制舱和动力源部件,所述旋转清理部件设置在控制舱的一端,辅助支撑部件、动力源部件均安装在控制舱的侧面;所述旋转清理部件上设置有由电机驱动的打磨刷以及摄像头,所述辅助支撑部件包括辅助支撑轮以及辅助升降杆,所述辅助支撑轮安装在辅助升降杆上,并由辅助升降杆带动移动;所述动力源部件包括动力源连接座、双轴减速电机、尼龙轮,所述动力源连接座与控制舱相连,所述双轴减速电机安装在动力源连接座上,所述尼龙轮安装在双轴减速电机的输出端。
3、优选的,所述控制舱整体呈条形结构,所述辅助支撑部件设置有一组,所述动力源部件设置有两组,两组动力源部件和一组辅助支撑部件绕着控制舱的中轴线在其侧面呈三叉式分布,且三叉之间的夹角设置为120°;所述控制舱的中轴线与隧洞本体的中轴线相互重合。
4、优选的,所述旋转清理部件包括连接件以及大功率旋转电机,所述连接件与控制舱的端部相连,所述大功率旋转电机安装在连接件上;所述连接件上设置有光电滑环,旋转清理部件上的电机、摄像头工作所用的线缆通过光电滑环连接至控制舱。
5、优选的,所述大功率旋转电机的输出端设置有三条呈三叉式分布的连接臂,且三条连接臂之间的夹角为120°;在连接臂的端部安装有水下电机,所述水下电机的输出端安装有打磨刷;所述连接臂上设置有减震弹簧,所述减震弹簧与水下电机侧面相连。
6、优选的,所述连接臂上安装有水下照明灯辅助摄像工作,所述摄像头分为两种,一种为主摄像头,另外一种为辅助摄像头;其中所述主摄像头安装在大功率旋转电机输出端上,所述辅助摄像头与连接臂配套安装;所述连接臂背向控制舱的一侧设置有第一抗水阻鳍片。
7、优选的,所述辅助升降杆设置在水密外壳中,所述水密外壳通过安装底座与控制舱相连;所述水密外壳内设置有电动推杆,所述辅助升降杆由电动推杆驱动;所述水密外壳两侧设置有第二抗水阻鳍片。
8、优选的,所述辅助支撑部件中设置有两组辅助升降杆,两组辅助升降杆关于控制舱的中间面对称设置,且辅助升降杆整体倾斜设置,两组辅助升降杆之间的夹角设置为60°。
9、优选的,所述双轴减速电机设置在安装架中,所述安装架与动力源连接座相互固定;在安装架的两侧设置有第三抗水阻鳍片。
10、优选的,所述动力源部件中设置有两组动力源连接座,两组动力源连接座关于控制舱的中间面对称设置,且动力源连接座整体倾斜设置,两组动力源连接座之间的夹角设置为60°。
11、与现有技术相比,本实用新型的有益效果是:本实用新型所提供的机器人克服了隧洞长、直径大、水压高、弱光等恶劣条件,即使在隧洞设备不停机、不放空的状态下,仍然可以完成检测清理任务,此举减少了电站因停机检修带来的经济损失;避免了人工检修带来的安全隐患;提高了隧洞检测清理的效率;保存了检测清理过程中的数字文档,使得电站向数字化转型迈出了关键一步。
技术特征:1.一种长隧洞水下检测清理机器人,其特征在于:包括旋转清理部件(1)、辅助支撑部件(2)、控制舱(3)和动力源部件(4),所述旋转清理部件(1)设置在控制舱(3)的一端,辅助支撑部件(2)、动力源部件(4)均安装在控制舱(3)的侧面;所述旋转清理部件(1)上设置有由电机驱动的打磨刷(101)以及摄像头,所述辅助支撑部件(2)包括辅助支撑轮(201)以及辅助升降杆(202),所述辅助支撑轮(201)安装在辅助升降杆(202)上,并由辅助升降杆(202)带动移动;所述动力源部件(4)包括动力源连接座(401)、双轴减速电机(402)、尼龙轮(403),所述动力源连接座(401)与控制舱(3)相连,所述双轴减速电机(402)安装在动力源连接座(401)上,所述尼龙轮(403)安装在双轴减速电机(402)的输出端。
2.根据权利要求1所述的一种长隧洞水下检测清理机器人,其特征在于:所述控制舱(3)整体呈条形结构,所述辅助支撑部件(2)设置有一组,所述动力源部件(4)设置有两组,两组动力源部件(4)和一组辅助支撑部件(2)绕着控制舱(3)的中轴线在其侧面呈三叉式分布,且三叉之间的夹角设置为120°;所述控制舱(3)的中轴线与隧洞本体(5)的中轴线相互重合。
3.根据权利要求1所述的一种长隧洞水下检测清理机器人,其特征在于:所述旋转清理部件(1)包括连接件(104)以及大功率旋转电机(106),所述连接件(104)与控制舱(3)的端部相连,所述大功率旋转电机(106)安装在连接件(104)上;所述连接件(104)上设置有光电滑环(105),旋转清理部件(1)上的电机、摄像头工作所用的线缆通过光电滑环(105)连接至控制舱(3)。
4.根据权利要求3所述的一种长隧洞水下检测清理机器人,其特征在于:所述大功率旋转电机(106)的输出端设置有三条呈三叉式分布的连接臂,且三条连接臂之间的夹角为120°;在连接臂的端部安装有水下电机(102),所述水下电机(102)的输出端安装有打磨刷(101);所述连接臂上设置有减震弹簧(103),所述减震弹簧(103)与水下电机(102)侧面相连。
5.根据权利要求4所述的一种长隧洞水下检测清理机器人,其特征在于:所述连接臂上安装有水下照明灯(107)辅助摄像工作,所述摄像头分为两种,一种为主摄像头(1010),另外一种为辅助摄像头(108);其中所述主摄像头(1010)安装在大功率旋转电机(106)输出端上,所述辅助摄像头(108)与连接臂配套安装;所述连接臂背向控制舱(3)的一侧设置有第一抗水阻鳍片(109)。
6.根据权利要求1所述的一种长隧洞水下检测清理机器人,其特征在于:所述辅助升降杆(202)设置在水密外壳中,所述水密外壳通过安装底座(204)与控制舱(3)相连;所述水密外壳内设置有电动推杆(205),所述辅助升降杆(202)由电动推杆(205)驱动;所述水密外壳两侧设置有第二抗水阻鳍片(203)。
7.根据权利要求1所述的一种长隧洞水下检测清理机器人,其特征在于:所述辅助支撑部件(2)中设置有两组辅助升降杆(202),两组辅助升降杆(202)关于控制舱(3)的中间面对称设置,且辅助升降杆(202)整体倾斜设置,两组辅助升降杆(202)之间的夹角设置为60°。
8.根据权利要求1所述的一种长隧洞水下检测清理机器人,其特征在于:所述双轴减速电机(402)设置在安装架中,所述安装架与动力源连接座(401)相互固定;在安装架的两侧设置有第三抗水阻鳍片(404)。
9.根据权利要求1所述的一种长隧洞水下检测清理机器人,其特征在于:所述动力源部件(4)中设置有两组动力源连接座(401),两组动力源连接座(401)关于控制舱(3)的中间面对称设置,且动力源连接座(401)整体倾斜设置,两组动力源连接座(401)之间的夹角设置为60°。
技术总结本技术涉及水下检测清理技术领域,具体公开了一种长隧洞水下检测清理机器人,由旋转清理部件、辅助支撑部件、控制舱和动力源部件构成,所述旋转清理部件设置在控制舱的一端,辅助支撑部件、动力源部件均安装在控制舱的侧面;所述旋转清理部件上设置有由电机驱动的打磨刷以及摄像头,所述辅助支撑部件包括辅助支撑轮以及辅助升降杆,所述辅助支撑轮安装在辅助升降杆上,并由辅助升降杆带动移动;所述动力源部件包括动力源连接座、双轴减速电机、尼龙轮,所述动力源连接座与控制舱相连,所述双轴减速电机安装在动力源连接座上,所述尼龙轮安装在双轴减速电机的输出端。技术研发人员:金国龙,张永来,徐康迪,胡世南,陈懿,李鸿桥,康靖宇受保护的技术使用者:中船第九设计研究院工程有限公司技术研发日:20231122技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/106036.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表