一种列车折返轨无人驾驶精确停车方法与流程
- 国知局
- 2024-08-01 08:49:42
本发明涉及轨道交通通信,具体涉及一种列车折返轨无人驾驶精确停车方法。
背景技术:
1、城际铁路是维系城市社会快速发展的重要纽带,其编组灵活、公交化运营的特点成为人们中短途出行的首选交通方式。基于城际铁路的运营速度区间,目前其主要的信号制式是ctcs-2+ato。
2、ctcs-2级列控系统在提供高安全性和经济性的同时,较相对于cbtc列控系统也存在一些运营效率上的固有短板。在自动折返场景中,相同的站场规模、相同列车加减速能力的情况下,ctcs2+ato信号系统无人自动折返能力明显低于cbtc。ctcs2+ato列车在折返时,列车在折返股道的运行距离目前取决于根据最大编组列车长度而设定的股道信号机位置。如图1所示,由于列车折返时的运营停车点信息缺失,导致列车需要运行到行车许可末端停车,这对于短编组列车或者非典型折返站场(折返轨较长)来说降低了运营效率同时增加了能耗。
技术实现思路
1、本发明的目的是为了提供一种列车折返轨无人驾驶精确停车方法,能够降低列车折返作业时间,从而提升运营效率,降低能耗。
2、为达到上述目的,本发明通过以下技术方案实现:
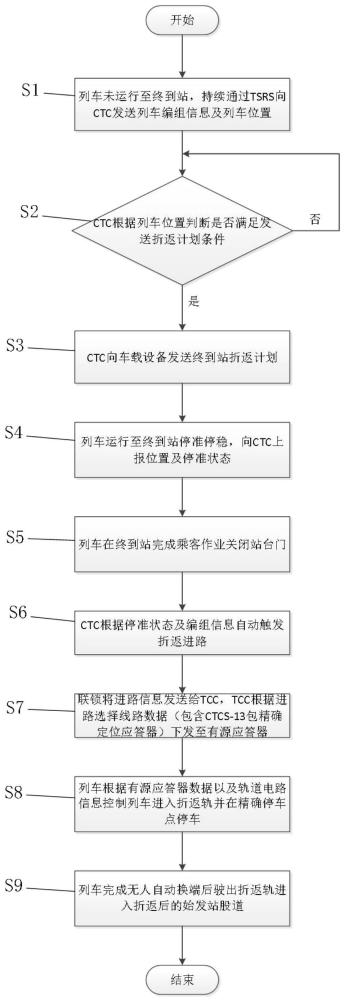
3、一种列车折返轨无人驾驶精确停车方法,包括:列车集中调度系统根据列车停准状态及编组信息触发折返进路;联锁系统将进路信息发送给列控中心,列控中心根据进路信息选择线路数据并下发至设于折返轨上的有源应答器;列车根据有源应答器中的线路数据以及轨道电路信息,进入折返轨并在精确停车点停车。
4、优选地,所述折返轨上设有分隔信号机,将所述折返轨分隔开,用于短编组列车的停车点。
5、进一步地,所述折返轨岔前处设置发车进路信号机,中间设置分隔信号机,末端设有阻挡信号机。
6、再进一步地,所示编组信息包括四编组、八编组、四加四重连编组,所述列车集中调度系统根据列车编组信息触发折返进路,包括:列车集中调度系统将四编组列车折返进路的终点设置在分隔信号机处,将八编组或者四加四重连编组列车的折返进路终点设置在阻挡信号机处。
7、再进一步地,在所述发车进路信号机处、分隔信号机处以及阻挡信号机或停车标志牌处均设置一个有源一个无源组成的应答器组。
8、更进一步地,所述列控中心根据进路信息选择线路数据并下发至设于折返轨上的有源应答器,包括:列控中心根据不同进路信息向有源应答器中配置适用于不同编组长度列车的数据包描述折返作业精确停车点位置。
9、更进一步地,所述列车根据有源应答器中的线路数据以及轨道电路信息,进入折返轨并在精确停车点停车,包括:列车自动驾驶系统根据所述数据包描述的折返作业精确停车点位置,控制列车在折返线上的走行距离,确保停车时车尾端完全进入折返轨道。
10、优选地,所述方法还包括:列车未运行至终到站,持续通过临时限速子系统向列车集中调度系统发送列车编组信息及列车位置。
11、进一步地,所述方法还包括:列车运行至距离终到站小于等于两个车站时,列车集中调度系统向车载设备发送终到站折返计划。
12、更进一步地,所述方法包括:列车运行至终到站停准停稳,向列车集中调度系统上报位置及停准状态。
13、优选地,所述方法还包括:列车完成无人自动换端后驶出折返轨,并进入折返后的始发站股道。
14、采用本发明的列车折返轨无人驾驶精确停车方法,首先列车集中调度系统根据列车停准状态及编组信息触发折返进路;然后联锁系统将进路信息发送给列控中心,列控中心根据进路信息选择线路数据并下发至设于折返轨上的有源应答器;最后列车根据有源应答器中的线路数据以及轨道电路信息,进入折返轨并在精确停车点停车。本发明通过在折返轨上设置有源应答器,使得列车折返时的运营停车点信息能够被获取,从而控制列车在精确停车点停车,而不必运行到折返轨末端停车,降低了列车折返作业时间,提升了运营效率,降低了能耗。
15、本发明中的折返轨设置信号机后,列车集中调度系统根据列车编组信息触发折返进路,降低了短编组列车折返股运行距离,提高了折返效率,并且实现了短编列车一线两列位,在特殊运营场景下可以做存车线使用,增加了运营的机动性。
16、本发明中的列控中心根据不同进路信息向有源应答器中配置适用于不同编组长度列车的数据包描述折返作业精确停车点位置,为列车自动驾驶系统控制列车在折返轨高效运行、准确停车提供了条件,对整体折返作业效率有明显提升作用。
技术特征:1.一种列车折返轨无人驾驶精确停车方法,其特征在于,包括:
2.如权利要求1所述的列车折返轨无人驾驶精确停车方法,其特征在于,所述折返轨上设有分隔信号机,将所述折返轨分隔开,用于短编组列车的停车点。
3.如权利要求2所述的列车折返轨无人驾驶精确停车方法,其特征在于,所述折返轨岔前处设置发车进路信号机,中间设置分隔信号机,末端设有阻挡信号机。
4.如权利要求3所述的列车折返轨无人驾驶精确停车方法,其特征在于,所示编组信息包括四编组、八编组、四加四重连编组,所述列车集中调度系统根据列车编组信息触发折返进路,包括:列车集中调度系统将四编组列车折返进路的终点设置在分隔信号机处,将八编组或者四加四重连编组列车的折返进路终点设置在阻挡信号机处。
5.如权利要求3所述的列车折返轨无人驾驶精确停车方法,其特征在于,在所述发车进路信号机处、分隔信号机处以及阻挡信号机或停车标志牌处均设置一个有源一个无源组成的应答器组。
6.如权利要求5所述的列车折返轨无人驾驶精确停车方法,其特征在于,所述列控中心根据进路信息选择线路数据并下发至设于折返轨上的有源应答器,包括:列控中心根据不同进路信息向有源应答器中配置适用于不同编组长度列车的数据包描述折返作业精确停车点位置。
7.如权利要求6所述的列车折返轨无人驾驶精确停车方法,其特征在于,所述列车根据有源应答器中的线路数据以及轨道电路信息,进入折返轨并在精确停车点停车,包括:列车自动驾驶系统根据所述数据包描述的折返作业精确停车点位置,控制列车在折返线上的走行距离,确保停车时车尾端完全进入折返轨道。
8.如权利要求1所述的列车折返轨无人驾驶精确停车方法,其特征在于,还包括:列车未运行至终到站,持续通过临时限速子系统向列车集中调度系统发送列车编组信息及列车位置。
9.如权利要求8所述的列车折返轨无人驾驶精确停车方法,其特征在于,还包括:列车运行至距离终到站小于等于两个车站时,列车集中调度系统向车载设备发送终到站折返计划。
10.如权利要求9所述的列车折返轨无人驾驶精确停车方法,其特征在于,包括:列车运行至终到站停准停稳,向列车集中调度系统上报位置及停准状态。
11.如权利要求1所述的列车折返轨无人驾驶精确停车方法,其特征在于,还包括:列车完成无人自动换端后驶出折返轨,并进入折返后的始发站股道。
技术总结本发明公开了一种列车折返轨无人驾驶精确停车方法,包括:列车集中调度系统根据列车停准状态及编组信息触发折返进路;联锁系统将进路信息发送给列控中心,列控中心根据进路信息选择线路数据并下发至设于折返轨上的有源应答器;列车根据有源应答器中的线路数据以及轨道电路信息,进入折返轨并在精确停车点停车。本发明通过在折返轨上设置有源应答器,使得列车折返时的运营停车点信息能够被获取,从而控制列车在精确停车点停车,而不必运行到折返轨末端停车,降低了列车折返作业时间,提升了运营效率,降低了能耗。技术研发人员:原野,周欣,杨奉伟,李登,闫琪,李紫薇,崔君晓,欧国恩受保护的技术使用者:卡斯柯信号有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240718/233516.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表