基于速度调节的钢轨波磨抑制方法及系统
- 国知局
- 2024-08-01 08:50:46
本发明涉及轮轨系统速度调节领域,尤其涉及基于速度调节的钢轨波磨抑制方法及系统。
背景技术:
1、钢轨波形磨耗(corrugation of rail)是指钢轨顶面纵向规律性的起伏不平的磨耗现象,按波长分为波纹形和波浪形两种。钢轨波磨一直是一个广泛存在的问题,不仅导致了基础设施的损坏,还会增加维护成本。列车速度越高,轨道受到的动态载荷越大,从而加速波磨的发展。为了抑制和消除钢轨波磨,目前主要的治理方法有打磨、润滑、调整扣件刚度及阻尼和添加减振器,此外学者也在通过控制列车速度的角度来减缓钢轨波磨。
2、地铁线路多由不同运行条件下的路段组成,一般情况下,地铁在不同区段内保持速度不变,而一些支撑刚度和阻尼较低的线路,速度不宜保持过高。因此有必要针对不同路况的路段合理地进行速度控制,从而减缓波磨的产生。
技术实现思路
1、本发明主要目的在于提供一种可以有效减缓列车波磨的基于速度调节的钢轨波磨抑制方法及系统。
2、本发明所采用的技术方案是:
3、提供一种基于速度调节的钢轨波磨抑制方法,包括以下步骤:
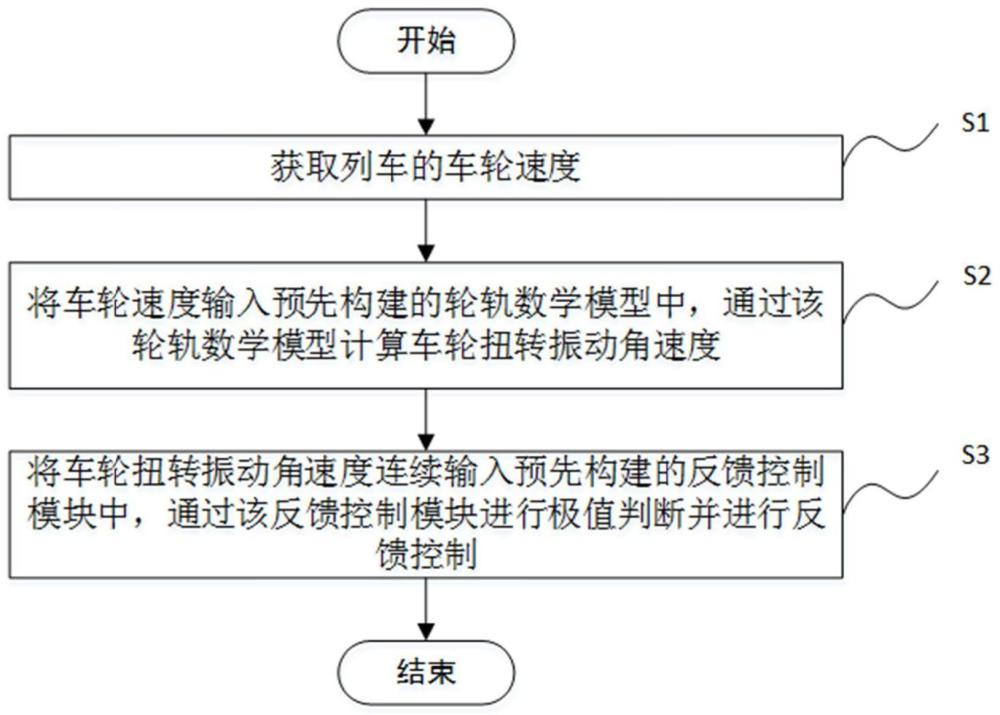
4、获取列车的车轮速度;
5、将车轮速度输入预先构建的轮轨数学模型中,通过该轮轨数学模型计算车轮扭转振动角速度;
6、将车轮扭转振动角速度连续输入预先构建的反馈控制模块中,通过该反馈控制模块进行极值判断,具体为:找到预设时间内车轮扭转振动角速度的极大值和极小值,判断极大值和极小值之和是否大于预设阈值,若是,则输出控制车轮速度减小预设值的指令给列车,以使列车减少波磨;若否,则继续进行极值判断。
7、接上述技术方案,轮轨数学模型表示为:
8、该轮轨数学模型具体为:
9、
10、式中,mw,jw,mr分别为车轮的质量,车轮轴的转动惯量,轨道的质量;c1,c2,c3分别为一系悬挂的阻尼,车轮轴的扭转阻尼,扣件系统的阻尼;k1,k2,k3分别为一系悬挂的刚度,车轮轴的扭转刚度,扣件系统的刚度;yw分别为车轮的垂向振动加速度,垂向振动速度,垂向位移;θw分别为车轮的扭转振动角加速度,扭转振动角速度,扭转振动角位移;yr分别为车轮的垂向振动加速度,垂向振动速度,垂向位移;p0为车轮上的静态作用力;fn,ft分别为轮轨间的法向力和纵向蠕变力。
11、接上述技术方案,其中:
12、
13、式中,kh为轮轨间的接触刚度,μ(ξ)为轮轨滚动接触中与纵向附着力比相关的黏着系数,表示为:
14、
15、其中,μk(ξ)是由kraft定义的相对摩擦特征,表示为:
16、
17、其中,μ0为静摩擦系数μ0;ξ’是标准化纵向蠕变参数。
18、接上述技术方案,ξ’表示为:
19、
20、式中,g为轮对材料弹性模量,g=e/2(1+υ),υ为泊松比;c11纵向蠕变系数,根据kalker线性理论所列的常数;a、b赫兹接触椭圆在滚动和横向方向的半长轴长度。
21、接上述技术方案,a、b值的计算采用确定轮轨接触椭圆的直接方法,通过引入参数:
22、
23、式中,r为车轮的名义滚动半径,rw为车轮踏面横断面外形的半径,rt为轨顶横断面外形的半径,ρ表示轮轨接触椭圆的曲率;
24、根据参数ρ/r得到中间变量ae、be,进而确定接触椭圆的半长轴:
25、
26、当ρ/r≤2时,
27、
28、当ρ/r>2时,
29、
30、式中mh和nh表示为赫兹理论中由下式所确定的β角有关的系数:
31、
32、接上述技术方案,在不断进行极值判断的过程中,每次均对极大值和极小值进行迭代更新并存储。
33、接上述技术方案,极值判断过程中,比较连续采样中相邻的三个值,若满足极值条件,则将其输出,否则输出0;找到极大值和极小值随时间变化的结果后,将结果导入到极值存储器;如果极值不为0,则将该值替代之前的极值并存储,若传入的数据为0,则用之前存储的极值。
34、接上述技术方案,初始一段时间列车处于不稳定运行阶段,获取的列车的车轮速度不进行极值判断。
35、本发明还提供一种基于速度调节的钢轨波磨抑制系统,包括:
36、数据获取模块,用于获取列车的车轮速度;
37、车轮扭转振动角速度计算模块,用于将车轮速度输入预先构建的轮轨数学模型中,通过该轮轨数学模型计算车轮扭转振动角速度;
38、反馈控制模块,用于将车轮扭转振动角速度连续输入预先构建的反馈控制模块中,通过该反馈控制模块进行极值判断并进行反馈控制,具体为:找到预设时间内车轮扭转振动角速度的极大值和极小值,判断极大值和极小值之和是否大于预设阈值,若是,则输出控制车轮速度减小预设值的指令给列车,以使列车减少波磨;若否,则继续进行极值判断并进行反馈控制。
39、接上述技术方案,轮轨数学模型表示为:
40、该轮轨数学模型具体为:
41、
42、式中,mw,jw,mr分别为车轮的质量,车轮轴的转动惯量,轨道的质量;c1,c2,c3分别为一系悬挂的阻尼,车轮轴的扭转阻尼,扣件系统的阻尼;k1,k2,k3分别为一系悬挂的刚度,车轮轴的扭转刚度,扣件系统的刚度;yw分别为车轮的垂向振动加速度,垂向振动速度,垂向位移;θw分别为车轮的扭转振动角加速度,扭转振动角速度,扭转振动角位移;yr分别为车轮的垂向振动加速度,垂向振动速度,垂向位移;p0为车轮上的静态作用力;fn,ft分别为轮轨间的法向力和纵向蠕变力。
43、本发明还提供一种计算机存储介质,其内存储有可被处理器执行的计算机程序,该计算机程序执行上述技术方案中任一项所述的基于速度调节的钢轨波磨抑制方法。
44、本发明产生的有益效果是:本发明基于摩擦自激扭振引起钢轨波磨构建了轮轨数学模型,利用该模型计算车轮扭转振动角速度,不断找到内轮扭转振动角速度的极大值和极小值,将两个极值求和,若相加结果大于预设值,则控制减小车轮速度,从而通过调节车轮速度来控制纵向蠕滑力,进而控制扭转振动的幅值的大小,达到有效减缓波磨的目的。
45、进一步地,构建的轮轨数学模型涉及车轮、轨道和扣件系统,且包含了纵向蠕变与黏附比之间的非线性关系,并将现场调查获得的垂向阻尼、刚度等参数导入到数学模型中,以此模拟地铁线路中的不同路况,使得计算的车轮扭转振动角速度更准确。
46、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:1.一种基于速度调节的钢轨波磨抑制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于速度调节的钢轨波磨抑制方法,其特征在于,轮轨数学模型表示为:
3.根据权利要求2所述的基于速度调节的钢轨波磨抑制方法,其特征在于其中:
4.根据权利要求3所述的基于速度调节的钢轨波磨抑制方法,其特征在于,ξ’表示为:
5.根据权利要求4所述的基于速度调节的钢轨波磨抑制方法,其特征在于,a、b值的计算采用确定轮轨接触椭圆的直接方法,通过引入参数:
6.根据权利要求1所述的基于速度调节的钢轨波磨抑制方法,其特征在于,在不断进行极值判断的过程中,每次均对极大值和极小值进行迭代更新并存储。
7.根据权利要求1所述的基于速度调节的钢轨波磨抑制方法,其特征在于,极值判断过程中,比较连续采样中相邻的三个值,若满足极值条件,则将其输出,否则输出0;找到极大值和极小值随时间变化的结果后,将结果导入到极值存储器;如果极值不为0,则将该值替代之前的极值并存储,若传入的数据为0,则用之前存储的极值。
8.根据权利要求1所述的基于速度调节的钢轨波磨抑制方法,其特征在于,初始一段时间列车处于不稳定运行阶段,获取的列车的车轮速度不进行极值判断。
9.一种基于速度调节的钢轨波磨抑制系统,其特征在于,包括:
10.根据权利要求9所述的基于速度调节的钢轨波磨抑制系统,其特征在于,轮轨数学模型表示为:
技术总结本发明公开了一种基于速度调节的钢轨波磨抑制方法,包括以下步骤:获取列车的车轮速度;将车轮速度输入预先构建的轮轨数学模型中,通过该轮轨数学模型计算车轮扭转振动角速度;将车轮扭转振动角速度连续输入预先构建的反馈控制模块中,通过该反馈控制模块进行极值判断并进行反馈控制,具体为:找到预设时间内车轮扭转振动角速度的极大值和极小值,判断极大值和极小值之和是否大于预设阈值,若是,则输出控制车轮速度减小预设值的指令给列车,以使列车减少波磨;若否,则继续进行极值判断。本发明可有效减缓波磨。技术研发人员:刘晓刚,张毅,徐劲力受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240718/233609.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种城市轨道用液压转辙机
下一篇
返回列表