一种基于线结构激光的快速连续廓形检测方法与流程
- 国知局
- 2024-08-01 08:48:56
本发明属于钢轨保护领域,涉及一种基于线结构激光的快速连续廓形检测方法。
背景技术:
1、铁路的安全问题一直是交通运输需要解决的首要问题,在铁路迅速发展的时代,需要及时发现铁路存在的问题并将其解决。
2、在铁路运输系统中,钢轨廓形的准确性对于确保列车运行的安全性、舒适性和效率至关重要。铁路轨道是列车行驶的基础设施,其几何形状和表面状态直接影响列车的稳定性、能耗以及运输效率。因此,对钢轨廓形进行精确、实时的检测和监测具有重要的意义。
3、首先,精确的廓形检测可以帮助预防和识别潜在的问题:如轨道变形、磨损或裂缝等。通过及时发现这些问题,铁路运营方提前采取有效的维护和修复措施,防范可能导致事故的隐患,确保铁路系统的安全性。
4、其次,准确的廓形信息对于铁路列车的运行平稳性和能效至关重要。不规则的轨道几何形状可能导致列车在行驶过程中产生振动、颠簸等不良影响,甚至引起列车和设备的损坏。通过监测廓形,铁路运营者可以调整和优化轨道结构,提高列车的平稳性,降低能耗,提升整个铁路系统的运输效率。
5、目前已有的钢轨廓形检测主要是使用接触式物理设备,人工选择位置后使用检测设备进行廓形检测,这种检测方式存在作业效率底,作业周期长。
6、如何更精准,更快速的实现连续廓形检测并将成果快速输出成为了亟需解决的问题。
技术实现思路
1、针对上述问题,本发明提出了一种基于线结构激光的快速连续廓形检测方法,通过线结构激光采集铁路钢轨廓形,以轨道小车为车载平台,设备搭载里程计,搭配激光扫描仪,高清相机,数据传输模块,多传感器同步控制单元,嵌入式计算机及各种供电设备等;通过预设位置安装,保证左右两边线结构激光的传感器数据覆盖整个钢轨;可实现高速连续检测,存储每个位置的精准廓形。
2、所述基于线结构激光的快速连续廓形检测方法,具体步骤如下:
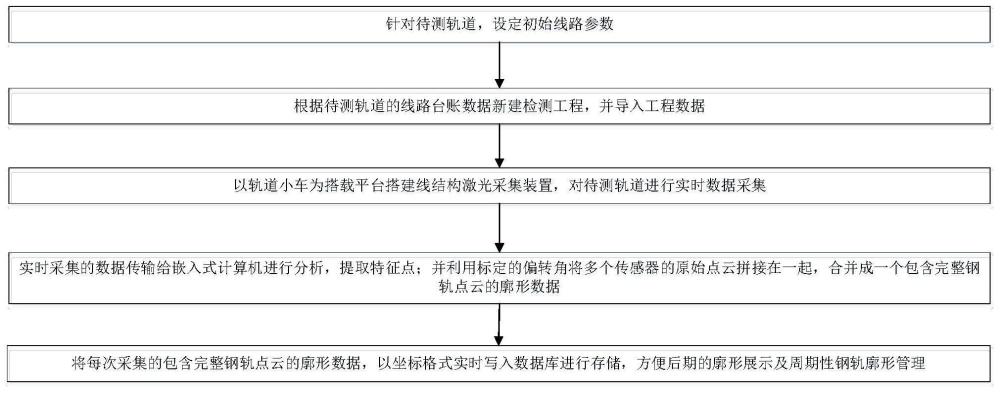
3、步骤一、针对待测轨道,设定初始线路参数;
4、初始参数包括起始里程、终止里程、铁路类型、线行、正线/站线、轨枕类型以及线路类型等。
5、步骤二、根据待测轨道的线路台账数据新建检测工程,并导入工程数据;
6、步骤三、以轨道小车为搭载平台搭建线结构激光采集装置,对待测轨道进行实时数据采集;
7、具体为:将各种供电设备安装在轨道小车上,轨道小车的下梁为竖直放置垂直于钢轨轨顶面的平面,下梁的底部安装线结构激光扫描仪,激光扫描仪的若干传感器分布在左右钢轨的两侧上方,对准钢轨保证线结构激光覆盖整个钢轨轨头、轨腰和轨底。里程计、多传感器同步控制单元、高清相机、数据传输模块和嵌入式计算机均位于激光扫描仪上方,同样安装在车下梁平面上。
8、里程计用于记录测量数据的里程位置;高清相机用于记录作业现场钢轨表面状态;通过多传感器同步控制单元协调实现各个传感器时间的时空同步,实现测量的传感器数据和钢轨里程一一对应;激光扫描仪在采集过程中通过搭载的编码器进行触发,实时存储对应的线结构传感器数据和里程计数据,并通过数据传输模块进入嵌入式计算机进行存储,同时实时显示。
9、步骤四:实时采集的数据传输给嵌入式计算机进行分析,提取特征点;并利用标定的偏转角将多个传感器的原始点云拼接在一起,合并成一个包含完整钢轨点云的廓形数据。
10、具体过程如下:
11、步骤401、计算标定的偏转角;具体为:
12、针对新的待测钢轨,实时采集其数据,并划分为与标准钢轨相同的区域,对每个区域均做如下处理:
13、首先,针对当前区域内的每帧二维点云,通过点拟合平面来计算每个点云的法向量,通过对每个点云计算其曲率,找出该点云所在区域的法向量起伏变化,起伏变化超出阈值的点,作为当前区域的特征点;
14、然后,按照该特征点对应的标准钢轨中的点云位置,人工对当前该特征点所在的区域进行旋转和平移,使其与标准钢轨的点云区域重合,并记录旋转和平移的偏转角作为标定的偏转角。
15、步骤402、对线结构激光采集装置采集的实时数据,同理,提取每个区域的特征点,并按照标定的角度进行旋转和平移,即得到原始点云,并将其拼接;
16、步骤403、从拼接的原始点云中,对激光传感器的噪声产生的影响点云进行滤波;
17、具体为:将原始点云划分维度,按照维度逐层遍历点云,剔除不在维度范围内的点,遍历结束后得到的点即滤波后的点云;
18、步骤404、将滤波后的每帧点云均采用高斯滤波法,将高斯噪声剔除,得到的即为最后实际采集的包含完整钢轨点云的廓形数据。
19、步骤五:将每次采集的包含完整钢轨点云的廓形数据,以坐标格式实时写入数据库进行存储,方便后期的廓形展示及周期性钢轨廓形管理。
20、本发明的优点在于:
21、1、一种基于线结构激光的快速连续廓形检测方法,相比现有的接触式物理设备采集钢轨廓形只能由人工操作进行单点测量,作业效率低,且人工操作过程中容易产生误差;本发明可以实现以80-120km/h的速度进行连续检测,检测效率高,且测量过程中由设备自行检测,测量误差相对较小。
22、2、一种基于线结构激光的快速连续廓形检测方法,线结构光可实现非接触测量,对沿线全断面点云数据和图像数据进行采集,如果存在点云扫描有误,可通过图像数据确认是否为真实环境导致。
23、3、一种基于线结构激光的快速连续廓形检测方法,线结构激光扫描仪精度较高,扫描数据损失精度较低,加上其他传感器的配合,因此输出的检测廓形精度非常高。
24、4、一种基于线结构激光的快速连续廓形检测方法,检测环境适应能力强;利用线结构激光传感器,gnss,编码器以及同步模块传感器组成一种连续廓形检测装置,此装置可搭载在轨道车及检测车辆,在车辆对轨道进行检查时即可对钢轨廓形数据进行采集,可以适应高速和低速的环境,并且使用编码器进行信号触发,提高数据的可靠性和稳定性。
25、5、一种基于线结构激光的快速连续廓形检测方法,降低人工成本与安全隐患。目前大部分还采用人工取点测量,人工测量周期过长且长时间上道作业存在大量安全隐患。线结构激光连续测量方式以80-120km/h的速度进行检测,检测效率高,可有效降低检测人员数量和上道时间,从而降低人工成本和安全生产隐患。
技术特征:1.一种基于线结构激光的快速连续廓形检测方法,其特征在于,具体步骤如下:
2.如权利要求1所述的一种基于线结构激光的快速连续廓形检测方法,其特征在于,所述初始参数包括起始里程、终止里程、铁路类型、线行、正线/站线、轨枕类型以及线路类型。
3.如权利要求1所述的一种基于线结构激光的快速连续廓形检测方法,其特征在于,所述步骤二中,里程计用于记录测量数据的里程位置;高清相机用于记录作业现场钢轨表面状态;通过多传感器同步控制单元协调实现各个传感器时间的时空同步,实现测量的传感器数据和钢轨里程一一对应;激光扫描仪在采集过程中通过搭载的编码器进行触发,实时存储对应的线结构传感器数据和里程计数据,并通过数据传输模块进入嵌入式计算机进行存储,同时实时显示。
4.如权利要求1所述的一种基于线结构激光的快速连续廓形检测方法,其特征在于,所述步骤403具体为:将原始点云划分维度,按照维度逐层遍历点云,剔除不在维度范围内的点,遍历结束后得到的点即滤波后的点云。
技术总结本发明公开了一种基于线结构激光的快速连续廓形检测方法,属于钢轨保护领域;具体为:首先,针对待测轨道,设定初始线路参数;根据待测轨道的线路台账数据新建检测工程,并导入工程数据;然后,以轨道小车为搭载平台搭建线结构激光采集装置,对待测轨道进行实时数据采集;并传输给嵌入式计算机进行分析,提取特征点;利用标定的偏转角将多个传感器的原始点云拼接在一起,合并成包含完整钢轨点云的廓形数据;最后,将每次采集的廓形数据,以坐标格式实时写入数据库,方便后期的廓形展示及周期性钢轨廓形管理。本发明可搭载在轨道车及检测车辆,可适应高低速的环境,并且使用编码器进行信号触发,提高数据的可靠性和稳定性;检测效率高。技术研发人员:蒋俊,赵冠闯,侯银庆,刘永乾,王军平,许海龙受保护的技术使用者:中铁物总运维科技有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240718/233450.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。