基于5G通信的无人巡检系统
- 国知局
- 2024-08-01 08:50:05
本发明涉及到轨道交通巡检,尤其涉及到的基于5g通信的无人巡检系统。
背景技术:
1、轨道用于列车行驶,然而在列车行驶过程中会发生较大振动,所以经常会发生用于对扣件进行固定的螺母松动后脱出,进而导致扣件丢失,然而扣件是将轨道进行固定的重要零件,如丢失后不及时进行修补,容易在列车在行驶过程中发生安全事故,然而目前一般是通过巡检车进行人工巡检,以通过人工观察检查出扣件丢失情况,当出现丢失时人工将扣件进行安装,此种方式由于需要人工在轨道上巡检和维修,使得在检修过程中存在一定的危险性(可能发生列车经过),同时人工劳动强度较大。
技术实现思路
1、为解决上述技术问题,本发明所设计了一种基于5g通信的无人巡检系统,具体如下。
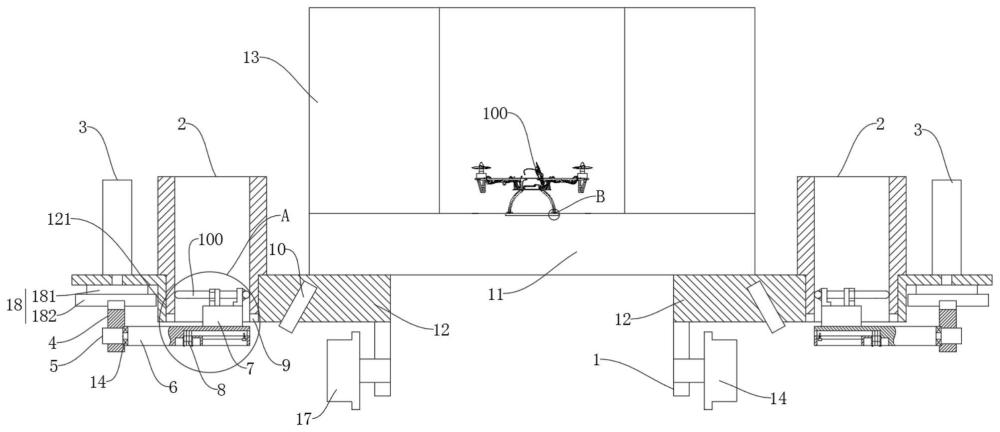
2、一种基于5g通信的无人巡检系统,包括无人飞机、以及可在轨道上行走的自动巡航车,自动巡航车的相对两侧板上设置有输送通道、以及位于各输送通道旁侧的升降装置,各输送通道内安装有用于定位扣件的定位筒,各定位筒的下端口下方分别设置有横向设置的旋转轴,各升降装置的下方分别设置有xy轴位移滑台,xy轴位移滑台的驱动部安装有滑动块,滑动块上安装有旋转装置,旋转装置的旋转部与旋转轴的端部对接,旋转轴上定位筒位置对应的部位相对上下两侧分别安装有用于扣件抓取的机械手和用于螺母安装的螺母安装的自动安装机构;各定位筒的下端部分别安装有照明环,照明环的旁侧设置有倾斜设置视觉摄像头;自动巡航车上还设置有用于无人飞机停放的停放平台、以及安装于停放平台的控制盒,控制盒内设置有控制器和5g通信模块,控制器通过5g通信模块与无人飞机通信,无人飞机上设置有巡检摄像头和gps定位模块,机械手和自动安装机构的中心轴线分别与旋转轴的中心轴线位置对应设置;无人飞机沿轨道飞行过程中,巡检摄像头工作进行实时录取轨道上的扣件安装位情况,并将录取的扣件安装位信息以及扣件安装位的定位信息一并通过5g通信模块回传至控制器,控制器分析回传的信息并判别扣件安装位是否具有扣件,若扣件正常,控制器则不发送驱动巡航车运行的控制指令,若扣件丢失,控制器则发送驱动巡航车运行的控制指令,自动巡航车根据该控制指令中的定位信息制定行走距离及路线、并驱使至定位信息的位置处,此时视觉摄像头录取扣件安装位位置信息、并传送至控制器,控制器根据扣件安装位图像确定扣件安装位中心、以及扣件安装位中心与旋转轴的轴心轴线之间的偏移量,然后根据偏移量作出位置微调以使中心对应,机械手将扣件抓取后安装至扣件安装位,旋转轴旋转180°、使得自动安装机构朝向扣件安装位,xy轴位移滑台驱动旋转轴横向平移,使得自动安装机构的螺母安装部中心与扣件安装位处的螺栓中心相互对应,最后自动安装机构将螺母安装在扣件安装位处的螺栓上、并压制扣件。
3、根据以上所述的基于5g通信的无人巡检系统,机械手上的三个手爪外壁设置有卡块,卡块上设置有与扣件匹配的卡槽,卡块的上下两端面均为斜面。
4、根据以上所述的基于5g通信的无人巡检系统,自动安装机构包括螺母推送滑台,旋转轴上设置有螺母存储通道、第一安装槽、以及位于螺母存储通道端部的螺母输出通道和第二安装槽,第二安装槽通过螺母输出通道与螺母存储通道相互连通设置,第二安装槽上安装内转子电机,内转子电机的内转子上设置有与螺母输出通道对应的安装通道,安装通道内安装有电磁套筒,安装通道的内径与螺母输出通道的内径相等,螺母推送滑台安装于安装槽内,螺母推送滑台的滑块上设置有铰接板,铰接板上通过扭簧销轴铰接有推送板,铰接板上位于螺母存储通道的端口处一侧设置有挡板,挡板抵触在推送板上位于螺母存储通道的端口处一侧,且推送板经螺母存储通道与安装槽之间的长形通道后置于螺母存储通道内。
5、根据以上所述的基于5g通信的无人巡检系统,电磁套筒的下端部设置有多个弹性复位结构,各弹性复位结构均包括自复位板,自复位板通过扭簧销轴铰接于电磁套筒的下端面。
6、根据以上所述的基于5g通信的无人巡检系统,螺母存储通道的端部内壁设置有电磁铁。根据以上所述的基于5g通信的无人巡检系统,旋转装置与旋转轴端部之间安装平面轴承
7、根据以上所述的基于5g通信的无人巡检系统,自动巡航车的侧板内嵌入下料顶压装置,下料顶压装置的顶压部对输送通道内底部第一个扣件进行顶压,当机械手的手爪抓住底部第一个扣件后,下料顶压装置的顶压部离开底部第一个扣件,此时升降装置驱动机械手下降一个扣件厚度的距离,此时下料顶压装置的顶压部伸出并抵触在底部第二个扣件上。
8、根据以上所述的基于5g通信的无人巡检系统,停放平台的中部设置有凹槽,凹槽内安装有减震垫板。
9、根据以上所述的基于5g通信的无人巡检系统,减震垫板上设置有四个分别与无人飞机的四个支架底端位置对应的定位槽,定位槽内壁上嵌设有电磁锁,电磁锁的锁杆与无人飞机的四个支架底端凸部配合卡位。
10、根据以上所述的基于5g通信的无人巡检系统,xy轴位移滑台包括x轴驱动滑台和y轴驱动滑台,自动巡航车的侧板底面设置有沿y轴设置的固定槽,y轴驱动滑台安装于固定槽内,x轴驱动滑台安装于x轴驱动滑台的滑块上,滑动块安装于x轴驱动滑台的滑块上。
11、本发明所设计的基于5g通信的无人巡检系统,有益效果如下:
12、利用无人飞机进行巡检,以快速录取需检查段轨道的图像,并将图像通过5g通信模块回传至控制器,所回传的图像信息中包含相应定位坐标信息,控制器进行判断扣件是否丢失情况,然后控制器根据各个具有丢失情况的扣件安装位定位坐标信息指定巡航路线,以驱动自动巡航车位移至相应位置进行扣件安装和螺母安装,其实现无人化巡检及自动维修,以降低人工劳动强度,避免检修过程中发生事故。
技术特征:1.一种基于5g通信的无人巡检系统,其特征在于,包括无人飞机(100)、以及可在轨道上行走的自动巡航车(1),自动巡航车(1)的相对两侧板(12)上设置有输送通道(121)、以及位于各输送通道(121)旁侧的升降装置(3),各输送通道(121)内安装有用于定位扣件的定位筒(2),各定位筒(2)的下端口下方分别设置有横向设置的旋转轴(6),各升降装置(3)的下方分别设置有xy轴位移滑台(18),xy轴位移滑台(18)的驱动部安装有滑动块(4),滑动块(4)上安装有旋转装置(5),旋转装置(5)的旋转部与旋转轴(6)的端部对接,旋转轴(6)上定位筒(2)位置对应的部位相对上下两侧分别安装有用于扣件抓取的机械手(7)和用于螺母安装的螺母安装的自动安装机构(8);各定位筒(2)的下端部分别安装有照明环(9),照明环(9)的旁侧设置有倾斜设置视觉摄像头(10);自动巡航车(1)上还设置有用于无人飞机(100)停放的停放平台(11)、以及安装于停放平台(11)的控制盒(13),控制盒(13)内设置有控制器和5g通信模块,控制器通过5g通信模块与无人飞机(100)通信,无人飞机(100)上设置有巡检摄像头和gps定位模块,机械手(7)和自动安装机构(8)的中心轴线分别与旋转轴(6)的中心轴线位置对应设置;
2.根据权利要求1所述的基于5g通信的无人巡检系统,其特征在于,机械手(7)上的三个手爪(71)外壁设置有卡块(711),卡块(711)上设置有与扣件匹配的卡槽(712),卡块(711)的上下两端面均为斜面。
3.根据权利要求1所述的基于5g通信的无人巡检系统,其特征在于,自动安装机构(8)包括螺母推送滑台(81),旋转轴(6)上设置有螺母存储通道(61)、第一安装槽(62)、以及位于螺母存储通道(61)端部的螺母输出通道(64)和第二安装槽(63),第二安装槽(63)通过螺母输出通道(64)与螺母存储通道(61)相互连通设置,第二安装槽(63)上安装内转子电机(84),内转子电机(84)的内转子上设置有与螺母输出通道(64)对应的安装通道,安装通道内安装有电磁套筒(85),安装通道的内径与螺母输出通道(64)的内径相等,螺母推送滑台(81)安装于安装槽内,螺母推送滑台(81)的滑块上设置有铰接板(82),铰接板(82)上通过扭簧销轴铰接有推送板(83),铰接板(82)上位于螺母存储通道(61)的端口处一侧设置有挡板,挡板抵触在推送板(83)上位于螺母存储通道(61)的端口处一侧,且推送板(83)经螺母存储通道(61)与安装槽之间的长形通道(65)后置于螺母存储通道(61)内。
4.根据权利要求3所述的基于5g通信的无人巡检系统,其特征在于,电磁套筒(85)的下端部设置有多个弹性复位结构,各弹性复位结构均包括自复位板(86),自复位板(86)通过扭簧销轴铰接于电磁套筒(85)的下端面。
5.根据权利要求3所述的基于5g通信的无人巡检系统,其特征在于,螺母存储通道(61)的端部内壁设置有电磁铁(88)。
6.根据权利要求3所述的基于5g通信的无人巡检系统,其特征在于,旋转装置(5)与旋转轴(6)端部之间安装平面轴承(14)。
7.根据权利要求2所述的基于5g通信的无人巡检系统,其特征在于,自动巡航车(1)的侧板(12)内嵌入下料顶压装置(19),下料顶压装置(19)的顶压部对输送通道(121)内底部第一个扣件进行顶压,当机械手(7)的手爪(71)抓住底部第一个扣件后,下料顶压装置(19)的顶压部离开底部第一个扣件,此时升降装置(3)驱动机械手(7)下降一个扣件厚度的距离,此时下料顶压装置(19)的顶压部伸出并抵触在底部第二个扣件上。
8.根据权利要求1所述的基于5g通信的无人巡检系统,其特征在于,停放平台(11)的中部设置有凹槽,凹槽内安装有减震垫(15)板。
9.根据权利要求9所述的基于5g通信的无人巡检系统,其特征在于,减震垫(15)板上设置有四个分别与无人飞机(100)的四个支架(101)底端位置对应的定位槽(151),定位槽(151)内壁上嵌设有电磁锁(16),电磁锁(16)的锁杆与无人飞机(100)的四个支架(101)底端凸部(102)配合卡位。
10.根据权利要求1-9任一项所述的基于5g通信的无人巡检系统,其特征在于,xy轴位移滑台(18)包括x轴驱动滑台(182)和y轴驱动滑台(181),自动巡航车(1)的侧板(12)底面设置有沿y轴设置的固定槽,y轴驱动滑台(181)安装于固定槽内,x轴驱动滑台(182)安装于x轴驱动滑台(182)的滑块上,滑动块(4)安装于x轴驱动滑台(182)的滑块上。
技术总结本发明公开了基于5G通信的无人巡检系统,包括无人飞机和自动巡航车,利用无人飞机进行巡检,以快速录取需检查段轨道的图像,并将图像通过5G通信模块回传至控制器,所回传的图像信息中包含相应定位坐标信息,控制器进行判断扣件是否丢失情况,然后控制器根据各个具有丢失情况的扣件安装位定位坐标信息指定巡航路线,以驱动自动巡航车位移至相应位置进行扣件安装和螺母安装,其实现无人化巡检及自动维修,以降低人工劳动强度,避免检修过程中发生事故。技术研发人员:马彦波,张微,燕玲,曾海军,陈炜,许锡伟,王乾,杨庆欣,景亮,裘文超,陈冠麟,任志杰,赵敏,翁建群,金琦,范亚静,马驰,张艳,冯天,李阳,景荣,苏斌受保护的技术使用者:浙江大学软件学院(宁波)管理中心(宁波软件教育中心)技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240718/233545.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表