一种基于行驶稳定性的车辆横纵向联合控制方法与流程
- 国知局
- 2024-08-02 16:38:39
本发明涉及一种基于行驶稳定性的车辆横纵向联合控制方法,属于车辆自主驾驶控制领域。
背景技术:
1、目前,在汽车的adas(高级驾驶辅助系统)中,当控制器的横纵向控制功能开启时,现有的横纵向联合控制方法是利用车辆的横向位置或者横向偏航角通过特定的算法(pid控制、lqr控制等)计算出期望的eps(转向助力)转角或者eps(转向助力)转矩,存在的缺陷也非常明显。
2、在车辆自主驾驶之中,行驶在急弯道路的时候,容易侧滑偏离出车道而发生事故。在大曲率弯道上行驶之中,如果车辆速度过快,对车辆则会产生过大的侧向加速度,过大的侧向加速度会使得车辆容易失稳而偏离出车道,从而发生事故。在在雨雪天气下的低附着路面,车辆自主驾驶之中容易出现侧滑而偏离车道线。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的不足,本发明提供一种基于行驶稳定性的车辆横纵向联合控制方法,保证自车行驶在满足特定条件的车道线内,安全且高效。
2、为了解决上述技术问题,本发明的技术方案是:
3、一种基于行驶稳定性的车辆横纵向联合控制方法,它包括:
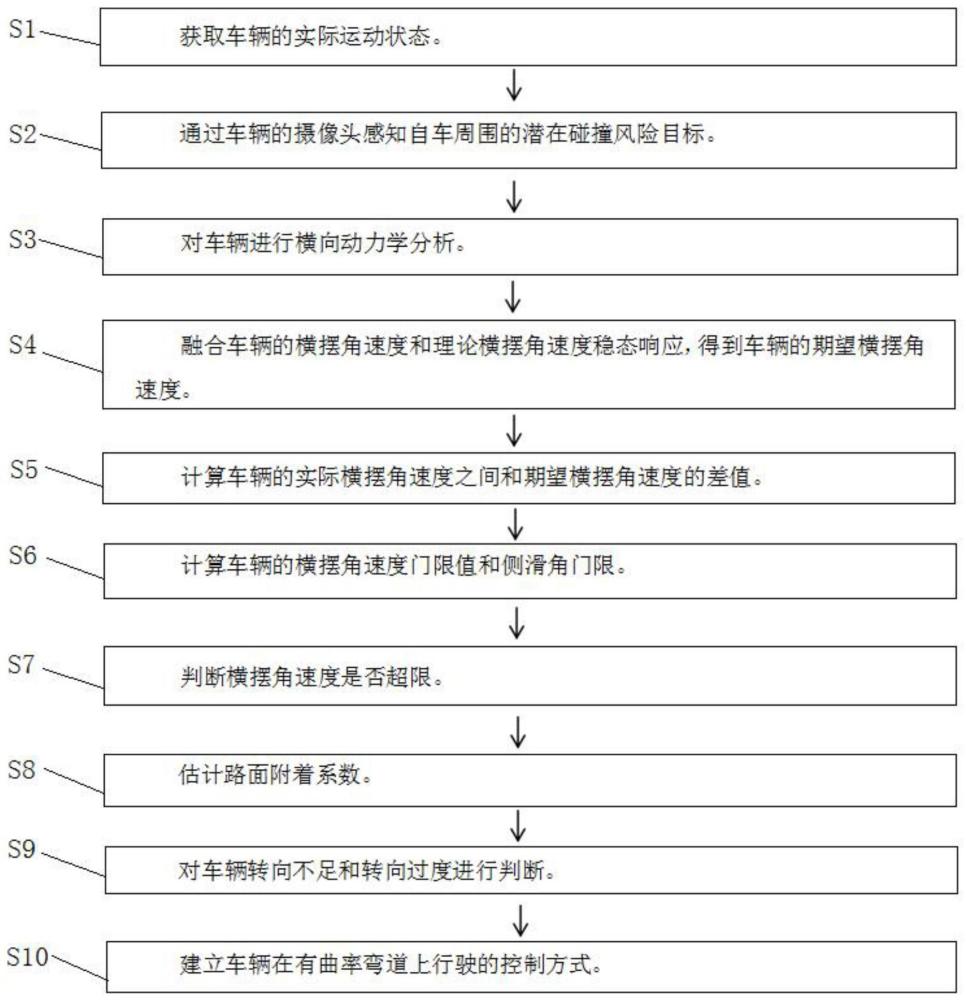
4、步骤s1、获取车辆的实际运动状态;
5、步骤s2、通过车辆的摄像头感知自车周围的潜在碰撞风险目标;
6、步骤s3、对车辆进行横向动力学分析;
7、步骤s4、融合车辆的横摆角速度和理论横摆角速度稳态响应,得到车辆的期望横摆角速度;
8、步骤s5、计算车辆的实际横摆角速度之间和期望横摆角速度的差值;
9、步骤s6、计算车辆的横摆角速度门限值和侧滑角门限;
10、步骤s7、判断横摆角速度是否超限;
11、步骤s8、估计路面附着系数;
12、步骤s9、对车辆转向不足和转向过度进行判断;
13、步骤s10、建立车辆在有曲率弯道上行驶的控制方式。
14、进一步,所述步骤s1中的运动状态包括横摆角速度rfeedback、侧向加速度ay、纵向加速度ax、车速u。
15、进一步,所述步骤s2具体包括如下步骤:
16、通过车辆的摄像头获取车道线信息,所述车道线信息包括车道线相对自车的横向距离c0、偏航角c1、车道线曲率c2以及曲率变化率c3,对车道线进行拟合,车道线拟合表达式为:
17、
18、其中,车辆坐标原点位于车辆后轴中心,x轴指向行驶方向,y轴与x轴垂直并指向车辆左侧,z轴与xy平面垂直并指向车辆正上方;
19、通过车辆的摄像头获取自车车道和相邻车道上存在的目标,所述目标的类别包括各类机动车辆、各类非机动车辆、人和动物,所述目标的的信息包括目标相对自车的横向距离和纵向距离;
20、通过车辆的摄像头获取道路情况,所述道路情况包括沥青路面、砂石路面和冰面。
21、进一步,所述步骤s3具体包括如下步骤:
22、步骤s31、建立二自由度车辆动力学模型,所述二自由度车辆动力学模型的表达式如下:
23、
24、
25、其中,k1为车辆前轴侧偏刚度;k2为车辆后轴侧偏刚度;
26、a为质心到车辆前轴的距离;b为质心到车辆后轴的距离;
27、m为整车质量;iz为车辆绕z轴的转动惯量;
28、u为车辆纵向速度;v为车辆横向速度;
29、δ为车辆前轮转角;β为车辆质心侧偏角;
30、α1为前轴轮胎侧偏角;α2为后轴轮胎侧偏角;
31、在前轮角阶跃输入下,当系统达到稳态的情况下,车辆横向速度为定值并且车辆的横摆角速度为定值将所述二自由度车辆动力学模型的表达式简化为:
32、
33、
34、对简化后的二自由度车辆动力学模型的表达式求解,得到车辆的稳态横摆角速度增益为:
35、
36、令称uchar为特征车速,称rlin为基于前轮转角的理论横摆角速度稳态响应,基于前轮转角的理论横摆角速度稳态响应rlin的表达式为:
37、
38、步骤s32、估计车辆的质心侧偏角β、前轴侧偏角α1和后轴侧偏角α2,进行受力分析,得到车辆横向动力学受力分析公式:
39、m*ay=k1*α1*cos(δ)+k2*α2;其中,ay侧向加速度;
40、对车辆进行几何学分析,得到:
41、
42、
43、将α1的表达式和α2的表达式代入车辆横向动力学受力分析公式,可以得到:
44、
45、从而估算得到车辆的质心侧偏角β、前轴侧偏角α1以及后轴侧偏角α2;
46、步骤s33、计算基于侧向加速度的理论横摆角速度ray,当车辆在有曲率的道路上行驶时,侧向加速度ay和横摆角速度ray的关系如下:
47、
48、进一步,所述步骤s4中,车辆的期望横摆角速度rref的计算公式为:
49、rref=ray*fcoeff+rlin*(1-fcoeff);
50、其中,fcoeff根据路面附着系数、车速等计算得到;
51、所述步骤s5中,车辆的实际横摆角速度之间和期望横摆角速度的差值rerr的计算公式为:
52、rerr=rfeedback-rref;
53、其中,rfeedback为车辆的实际横摆角速度,rref为车辆的期望横摆角速度。
54、进一步,所述步骤s6具体包括如下步骤:
55、根据车辆的实际状态、道路附着条件、计算得到车辆的横摆角速度门限值上限rupthresh、横摆角速度门限值下限rlowthresh;
56、根据车辆的实际状态、道路附着条件、计算得到车辆的质心侧偏角门限值βthresh、车辆的后轴侧滑门限αthresh、前后轴侧滑差值门限αf2rthresh。
57、进一步,所述步骤s7具体包括如下步骤:
58、根据横摆角速度偏差和横摆角速度门限值上限rupthresh、横摆角速度门限值下限rlowthresh,判断是否激活横摆角速度偏差过大的标记yaw_rate_error_flg;
59、当横摆角速度偏差过大,所述车辆的实际横摆角速度之间和期望横摆角速度的差值rerr的绝对值高于横摆角速度门限值上限rupthresh的时候,yaw_rate_error_flg标志置1;当横摆角速度偏差过小,所述车辆的实际横摆角速度之间和期望横摆角速度的差值rerr的绝对值低于横摆角速度门限值下限rlowthresh的时候,yaw_rate_error_flg标志置0。
60、进一步,所述步骤s8具体包括如下步骤:
61、步骤s81、通过摄像头估计路面附着系数:
62、采集车辆的摄像头感知得到的道路曲率ρ;同时,根据车辆的摄像头感知到的天气情况以及道路情况,并且融合车辆在制动或者驱动过程之中的加减速度,来估计路面的附着系数μest;
63、设adas控制器视觉感知给出的路面附着系数估计为μestcamera,则有:
64、
65、步骤s82、通过车辆动力学估计路面附着系数:
66、依据车辆的加减速度估计路面附着系数μestacc,则有:
67、
68、步骤s83、计算融合路面附着系数μest:
69、融合路面附着系数μest的计算公式如下:
70、μest=coeffkalman*μestacc+(1-coeffkalman)*μestcamera;
71、其中,滤波系数coeffkalman根据两种估计方法的置信度或估计标准差计算得到;
72、步骤s84、路面轮胎受力分析:
73、对车辆的轮胎进行受力分析,路面实际附着对于车辆的侧向和纵向加速度的限制的表达式为:
74、
75、进一步,所述步骤s9具体包括如下步骤:
76、当侧滑角不大的情况下,即|β|≤βthresh,则有:
77、车辆左转向时,转向不足和转向过度的判断方法如下:
78、若rerr≥rupthresh,则车辆转向过度,此时转向过度标志置oversteerflg=1;
79、若rerr≤-rupthresh,则车辆转向不足,此时转向不足标志置understeerflg=1;
80、车辆右转向时,转向不足和转向过度的判断方法如下:
81、若rerr≤-rupthresh,则车辆转向过度,此时转向过度标志置oversteerflg=1;
82、若rerr≥rupthresh,则车辆转向不足,此时转向不足标志置understeerflg=1;
83、当侧滑角过大的情况下,即|β|≥βthresh,此时车辆出现了侧滑,则有:
84、|α2|≥αthresh,后轴侧滑严重,车辆甩尾,则车辆转向过度,此时转向过度标志置oversteerflg=1;
85、如果|α2|<αthresh,并且|α1-α2|>αf2rthresh,则可能是前轴侧滑,此时车辆转向不足,此时转向过度标志置understeerflg=1。
86、进一步,所述步骤s10具体包括如下步骤:
87、步骤s101、在考虑道路附着系数的情况下,对车辆的横纵向的控制策略如下:
88、计算车辆的横纵向加减速度限值:
89、车辆横纵向加减速度限值的计算公式如下:
90、aylim=(ksafe*uest)*g;
91、
92、其中,aylim为车辆纵向加减速度限值,axlim为车辆横向加减速度限值,ksafe为小于1.0的安全系数;
93、方向盘转角限值的计算公式如下:
94、δswlim=f(aylim,u);
95、其中,δswlim为方向盘转角;
96、步骤s102、当车辆控制稳定,不存在转向不足以及转向过度的控制策略如下:
97、如果yaw_rate_error_flg为0,且oversteerflg=0&understeerflg=0,此时adas控制器采取如下的控制策略来提高车辆的行驶稳定性:
98、依据步骤s2中的车道线拟合表达式为计算预瞄时刻的道路曲率ρpreviewcamera,预瞄时间点的道路曲率ρpreviewcamera的计算公式如下:
99、ρpreviewcamera=c2+c3*tpreview;
100、其中,tpreview为预瞄时间;
101、依据定位和地图,提前预测得到道路曲率ρpreviewmap;
102、对预瞄时间点的道路曲率ρpreviewcamera和提前预测的道路曲率ρpreviewmap进行融合,计算公式如下:
103、ρpreview=ρpreviewmap*coeffcur+(1-coeffcur)*ρpreviewcamera;
104、其中,coeffcur为滤波系数;
105、预测出以当前车速行驶在ρpreview道路上的侧向加速度,计算公式如下:
106、aypreview=ρpreview*u2
107、如果|aypreview|>aylim,则说明车辆在前方道路行驶的情况下,容易出现失稳,此时降低车速至车辆能稳定行驶的限值ulimpreview以下,车辆能稳定行驶的限值ulimpreview的表达式如下;
108、
109、在对车辆进行加减速度的时候,不超过axlim,即:
110、|areq|≤axlim;
111、如果|aypreview|<aylim,则可以保持现有车速行驶;
112、在对车辆进行纵向加减速度的时候,不超过axlim,即:
113、|areq|≤axlim;
114、在对车辆进行横向车道线保持控制的时候,adas控制器期望的方向盘转角δswref的绝对值不超过δswlim限值,即:
115、|δswref|≤δswlim;
116、步骤s103、当车辆控制存在转向不足或转向过度情况下的控制策略如下:
117、如果yaw_rate_error_flg为1或oversteerflg=1或understeerflg=1,此时采用如下控制策略控制车辆的横纵向速度:
118、若车辆不是在换道行驶过程中:
119、若此时车辆保持在车道线内进行行驶的过程中出现了横摆角速度偏差过大的情况,此时车辆维持车道保持功能,将车辆保持车道线内的同时对车辆减速,adas控制器请求的加减速度小于一定限值axlim,即:
120、|areq|≤axlim;
121、在对车辆的行驶控制之中,对方向盘期望转角幅值δswref进行限值,方向盘期望转角幅值δswref的绝对值不超过δswlim的限值,即:
122、|δswref|≤δswlim;
123、直到车辆恢复稳定,即yaw_rate_error_flg为0;
124、若车辆处在换道行驶过程中:
125、若此时车辆换道动作过于激进,则在主动转向之中减小方向盘期望转角幅值δswref,从而减小车辆的横摆角速度;同时在换道过程之中保持匀速,直到车辆恢复稳定,即yaw_rate_error_flg为0;
126、按照以下要求对方向盘期望转角幅值δswref进行限值,方向盘期望转角幅值δswref的绝对值不超过δswlim限值,即:
127、|δswref|≤δswlim。
128、采用了上述技术方案,本发明根据车辆的方向盘转角、惯性传感器的侧向加速度以及横摆角速度等信号,及早的探测到车辆的转向不足或者过度转向,并对车辆进行早期的速度控制,从而避免车辆偏离车道的现象发生。当车辆在低附着湿滑路面、下雪结冰打滑路面、砂石路面等弯道上转弯行驶之中,防止车辆出现侧滑而偏离出车道线。当车辆行驶在急弯道路的时候,避免因侧滑偏离出车道发生的事故。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251741.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表