一种履带式陆空两栖无人机
- 国知局
- 2024-08-02 16:40:20
本技术属于陆空两栖无人机领域,一种复合对称式履带轮,多功能旋翼杆的两栖无人机领域。
背景技术:
1、传统的机器人大多通过车轮或者履带通过地面行驶,履带式机器人虽具有很好自复位和越障能力,但是其在良好路面总体速度较慢。传统无人机大多通过垂直起降进行起飞。传统陆空两栖飞行器大多需要通过良好的空中环境,在错综复杂的野外,森林等环境下飞行,很容易受干扰而破坏。
2、一种履带式陆空两栖无人机结合履带式机器人和无人机的优点,并削弱了隐蔽性差,所需飞行空间相对大、所需飞行调节高的缺点。履带式陆空两栖无人机可以满足灾害救援、资源勘探、野外侦查等复杂作业、复杂场景、复杂地形产生的特殊需求。
技术实现思路
1、本实用新型目的是解决传统履带式机器人总体行进速度慢且运行声音大,飞行机器人所受空中环境影响大且隐蔽性差、飞行系统不完善的问题,进而提供一种履带式陆空两栖无人机。
2、本实用新型为解决上述技术问题采取的技术方案是:陆空两栖无人机采用了分布式模块化升力系统,并进行了合理地冗余设计,保障了飞行的安全性和可靠性,同时提高了空飞系统的可维修性。空飞系统采用类似于四轴八桨的共轴多旋翼升力单元,在保证可靠安全飞行的同时,也保障了陆地行驶模式外廓尺寸满足高机动性的要求。
3、本实用新型为解决上述技术问题采取的技术方案是:动力系统采用了三元锂聚合物电池与无刷直流电机的组合形式,纯电动驱动,能以静默方式实现陆地行驶,便于隐身和对目标发动突然攻击。陆行系统采用履带方式,增强了各种非结构化道路的地面通过性。
4、实现本实用新型目的的技术解决方案为:一种履带式陆空两栖无人机,包括两条履带、四个复合旋翼杆、两个前支撑架总成、两个中间支撑架总成、两个后支撑架总成、四个大履带传动轮、四个小履带传动轮、一个复合车体、十二个非金属小负载轮、八个张紧轮、四个大负载轮、一个电池、八个电调、八个旋翼、八个旋翼驱动电机、两个履带驱动电机。所述旋翼、旋翼驱动电机、履带驱动电机与履带均安装在同一个支撑架总成上;所述复合车体包括一个电池、八个电感、车架主体支架、连接支架;所述连接支架通过锁夹将主体支架与复合旋翼杆连接。所述复合旋翼杆中部通过锁夹固定在复合车体,端部通过旋翼处卡箍固定并通过螺栓与旋翼驱动电机与支撑架总成连接。
5、本实用新型与现有技术相比,其显著优点为:1)将旋翼安装在履带内部,极大的节省了安装和整体空间;2)分布式模块升力系统,每个支撑架上采用两个旋翼上下安装,增加了旋翼的数量,提高了陆空两栖无人机飞行能力;3)稳定性高、整体空间利用率高、通过性强、4)保证可靠安全飞行的同时,也保障了陆地行驶模式外廓尺寸满足高机动性的要求。
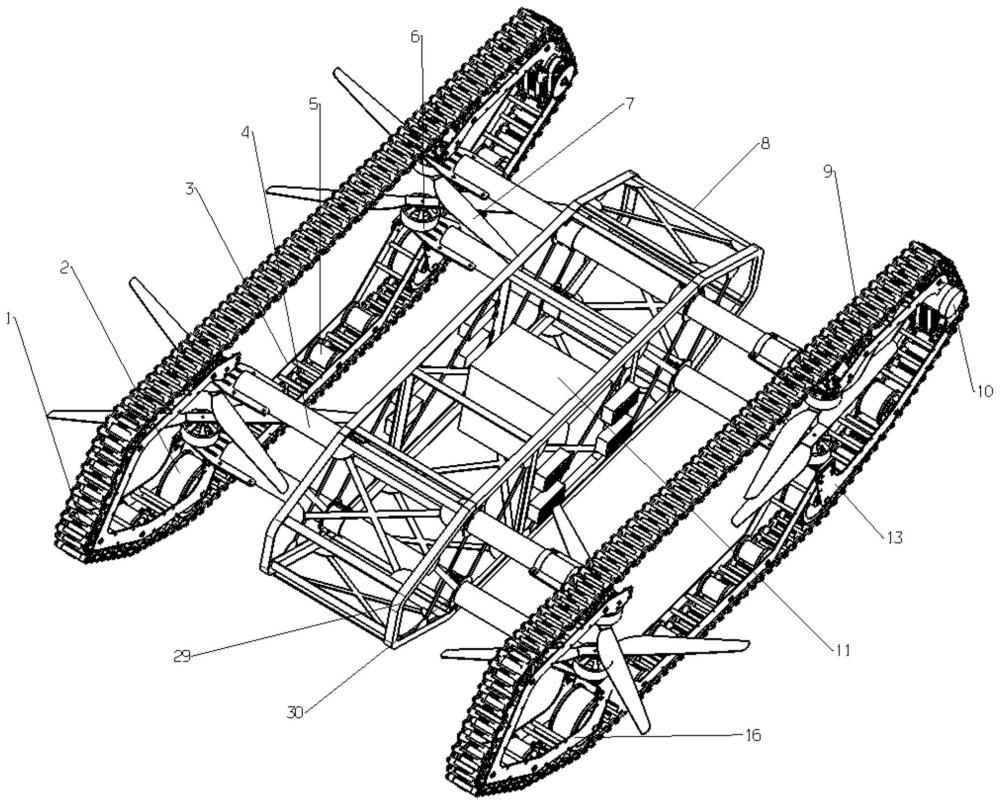
技术特征:1.一种履带式陆空两栖无人机,其特征在于:包括两条履带(1)、四个复合旋翼杆(4)、两个前支撑架总成(16)、两个中间支撑架总成(3)、两个后支撑架总成(13)、四个非金属大负重轮(2)、四个履带张紧轮(9)、一个复合车体(8)、八个旋翼(7)、八个旋翼驱动电机(6)、两个履带驱动机构(10);
2.根据权利要求1所述的一种履带式陆空两栖无人机,其特征在于:所述复合车体(8)包括一个电池(11)、八个电调(14)、两条车架主体支架(29)、车体圆盘(30)、连接支架(15);所述车架主体支架(29)上下采用连接支架(15)连接;所述车体圆盘(30)与连接支架(15)一端相连;所述复合车体(8)顶部可根据需要携带装备。
3.根据权利要求1所述的一种履带式陆空两栖无人机,其特征在于:所述复合旋翼杆(4)中部采用锁夹(27)与车体圆盘(30)固定在复合车体(8)的主体车架,端部通过旋翼处卡箍(25)固定并通过螺栓与旋翼驱动电机(6)与旋翼电机转接板(28)总成连接,旋翼驱动电机(6)采用内六角螺钉与复合旋翼杆(4)连接固定。
4.根据权利要求1所述的一种履带式陆空两栖无人机,其特征在于:所述履带驱动机构(10)固定在后支撑架总成(13)的固定支座,履带驱动电机(20)通过小带轮使用带传动将动力传递到大带轮,大带轮与小带轮同轴,小带轮通过带传动将动力传递到大带轮上,大带轮通过链轮传动将动力传递到履带。
5.根据权利要求1所述的一种履带式陆空两栖无人机,其特征在于:所述复合车体(8)内装配控制装置及信号输送传递装置。
技术总结一种履带式陆空两栖无人机属于陆空两栖无人机领域,采用前后、左右对称的模式。本装置由空中飞行系统和地面行进系统组成。地面行进系统采用两条轻质履带,左右两条履带由前、中、后三根旋翼架支撑连接,每一条履带由前后相同且对称的两个支架总成支撑。空中飞行系统采用双四旋翼的上下对翼的八旋翼,旋翼也是固定在支架总成上。空中飞行系统与地面行进系统没有像传统无人机上下分开采用卡扣等方式连接。而是空中飞行系统与地面行进系统相结合,都安装在支撑架总成上,中部车体上部可根据需要放置装备。本装置布局严密、精巧,降低整个无人机的体积,提高了路面的通过性。即减少了质量、提高了飞行能力,可用于灾害救援、资源勘探、野外侦查等。技术研发人员:么鸣涛,徐明清,李宝玉,李翔宇,王嘉伟,何晨昊受保护的技术使用者:北京化工大学技术研发日:20230921技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251890.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表