一种机器人的臂腕结构的制作方法
- 国知局
- 2024-08-05 13:28:51
本技术涉及机器人的,尤其是涉及一种机器人的臂腕结构。
背景技术:
1、随着科技的发展与人文的进步,机器人越来越普遍地运用在各行各业。其中,六轴机器人由于具有多个自由度而更受青睐。
2、现有的六轴机器人的五六轴传动结构(即臂腕结构)中通常第五轴为小臂关节,第六轴为手腕关节;其传动原理为:小臂关节内置的第一动力装置驱动手腕关节的主体旋转,手腕关节的主体内置的第二动力装置驱动手腕关节的旋转件旋转。
3、但是,在手腕关节内设置第二动力装置将导致手腕关节的体积以及质量均较大,这将增加手腕关节活动的负荷,从而将会提高手腕关节活动过程中产生的损耗;同时,也会对手腕关节活动的灵活性以及精确度产生不良影响。
4、因此,亟需对现有的六轴机器人的五六轴传动结构(即臂腕结构)进行改进。
技术实现思路
1、本技术提供一种机器人的臂腕结构,能够减小手腕关节的体积且减小手腕关节的质量,从而能够有效提高手腕关节活动的灵活性以及精确度。
2、本技术提供一种机器人的臂腕结构,采用如下的技术方案:
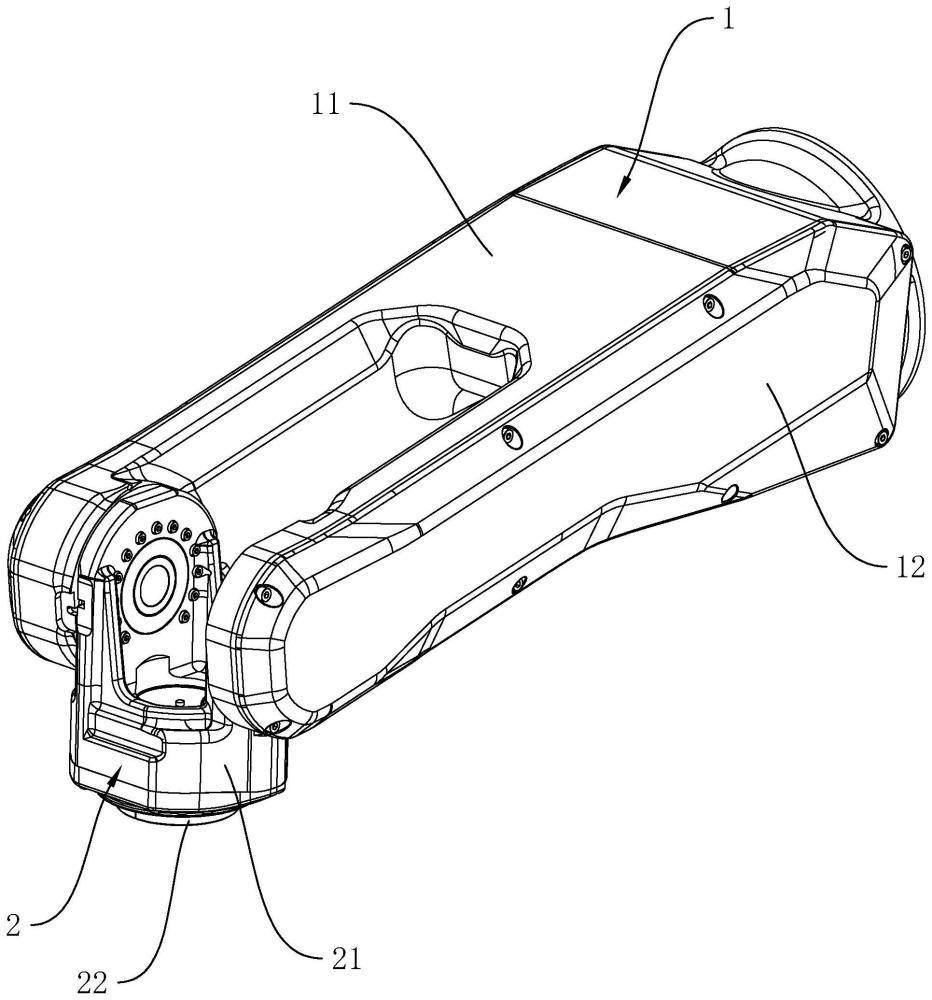
3、一种机器人的臂腕结构,包括小臂关节、手腕关节、第一动力装置以及第二动力装置,所述小臂关节包括第一壳体以及两个盖体,所述第一壳体的两侧均具有安装槽,所述第一壳体的内部具有让位空间,所述让位空间与两所述安装槽相通,所述盖体与所述第一壳体可拆卸连接且与所述第一壳体连接后覆盖所述安装槽的开口;所述第一动力装置包括第一驱动件以及第一传动组件,所述第二动力装置包括第二驱动件以及第二传动组件,所述第一驱动件以及所述第二驱动件均设置于所述让位空间中,所述第一传动组件以及所述第二传动组件分别设置于两所述安装槽中;所述手腕关节与所述小臂关节转动连接,所述手腕关节能够自转,所述手腕关节相对于所述小臂关节的转动轴线与所述手腕关节自转的转动轴线垂直;所述让位空间位于所述第一壳体远离所述手腕关节的一端;所述第一动力装置驱使所述手腕关节相对于所述小臂关节转动,且所述第二动力装置驱使所述小臂关节自转。
4、通过采用上述技术方案,第一动力装置以及第二动力装置均设置于小臂关节上,同时小臂关节上质量分布平衡,且第一驱动件以及第二驱动件的重力将集中于小臂关节远离手腕关节的位置,能够减小小臂关节与手腕关节连接处的负担,从而能够减小手腕关节的体积且减小手腕关节的质量,进而能够有效提高手腕关节活动的灵活性以及精确度。
5、可选的,所述第一传动组件包括第一同步带以及两个第一转动轮,两所述第一转动轮分别设置于所述第一驱动件上以及所述第一壳体上,两所述第一转动轮均位于同一所述安装槽中;设置于所述第一壳体上的所述第一转动轮与所述第一壳体转动连接且能够驱使所述手腕关节随之相对于所述小臂关节转动;所述第一同步带同时绕设于两所述第一转动轮上,所述第一同步带驱使两所述第一转动轮同步转动;
6、所述第一动力装置还包括连接件,所述第一驱动件与所述连接件连接,所述连接件与所述第一壳体连接,且所述连接件相对于所述第一壳体的位置可调节。
7、通过采用上述技术方案,调节连接件相对于第一壳体的位置后,能够对第一同步带的张紧程度进行调节,从而能够提高第一传动组件的传动效果,进而能够提高手腕关节活动的精确度。
8、可选的,所述连接件上具有凸起,所述第一壳体上开设有与所述凸起相适配的引导槽,所述凸起沿所述引导槽活动能够驱使所述连接件朝靠近或远离所述手腕关节的方向活动。
9、通过采用上述技术方案,能够方便使用者对连接件进行位置调节,从而进一步方便使用者对第一同步带的张紧程度进行调节。
10、可选的,所述第二传动组件包括第二同步带以及两个第二转动轮,两所述第二转动轮分别设置于所述第二驱动件上以及所述第一壳体上,两所述第二转动轮均位于同一所述安装槽中;设置于所述第一壳体上的所述第二转动轮与所述第一壳体转动连接且能够驱使所述手腕关节随之发生自转;所述第二同步带同时绕设于两所述第二转动轮上,所述第二同步带驱使两所述第二转动轮同步转动;
11、所述第二动力装置还包括调节组件,所述调节组件包括张紧轮、调节件以及定位件,所述调节件与所述第一壳体转动连接,所述张紧轮与所述调节件转动连接,且所述定位件能够固定所述调节件的位置;所述第二同步带绕设于所述张紧轮上,且所述调节件转动能够改变所述第二同步带的张紧程度;
12、所述第一壳体于所述让位空间的一端开口处具有连接板,所述第二驱动件与所述连接板连接。
13、通过采用上述技术方案,控制调节件转动后即可通过张紧轮对第二同步带进行张紧程度的调节,从而能够提高第二传动组件的传动效果,进而能够进一步提高手腕关节活动的精确度。
14、可选的,所述连接板位于所述第一驱动件背离所述第一传动组件的一侧,且所述连接板于所述让位空间的开口处留有供所述让位空间与相邻所述安装槽相通的空间。
15、通过采用上述技术方案,连接板能够同时方便第一驱动件以及第二驱动件进行安装,并且能够在控制第一壳体的质量的同时,提高第一壳体于让位空间处的结构强度。
16、可选的,所述第一壳体于所述安装槽远离自身开口的槽壁上设置有若干加强筋。
17、通过采用上述技术方案,加强筋能够提高第一壳体的结构强度,从而能够降低小臂关节活动过程中的损耗。
18、可选的,所述调节件与若干所述加强筋的交界处转动连接。
19、通过采用上述技术方案,调节件于结构强度更强的位置转动连接,能够提高调节件的位置稳定性,从而使调节组件能够稳定对第二同步带起张紧调节的作用。
20、可选的,所述加强筋上开设有用于限制所述调节件转动的限位槽,所述调节件于所述限位槽中转动。
21、通过采用上述技术方案,能够方便使用者对调节件进行转动调节,从而进一步方便使用者对第二同步带的张紧程度进行调节。
22、可选的,所述手腕关节包括第二壳体以及转动座,所述第二壳体与所述第一壳体转动连接且由所述第一动力装置驱动,所述转动座与所述第二壳体转动连接且由所述第二动力装置驱动;
23、所述手腕关节还包括由所述第二动力装置驱动的齿轮组件,所述齿轮组件被驱动后驱使所述转动座相对于所述第二壳体转动;
24、所述齿轮组件包括消隙齿轮组以及从动齿轮,所述消隙齿轮组包括固定齿轮、活动齿轮以及若干弹性件,所述固定齿轮设置于所述转动座上,所述活动齿轮与所述转动座转动连接,且所述活动齿轮的转动轴线与所述转动座的转动轴线重合;所述弹性件的两端分别与所述活动齿轮以及所述转动座连接;所述从动齿轮与所述第二壳体转动连接且由所述第二动力装置驱动,所述固定齿轮与所述从动齿轮啮合,且所述固定齿轮的齿沿一方向与所述从动齿轮的齿接触相抵;所述活动齿轮也与所述从动齿轮啮合,若干所述弹性件驱使所述活动齿轮转动,使所述活动齿轮的齿沿另一方向与所述从动齿轮的齿接触相抵。
25、通过采用上述技术方案,能够提高第二驱动件输出的动力于手腕关节上的传递效果,从而能够提高第二动力装置控制手腕关节自转的精确度。
26、可选的,所述弹性件为压簧。
27、通过采用上述技术方案,压簧所需安装空间较拉簧小,故能够减小消隙齿轮组的占用体积,从而能够减小手腕关节的体积且减小手腕关节的质量,进而能够有效提高手腕关节活动的灵活性以及精确度。
28、综上所述,本技术包括以下至少一种有益效果:
29、1.能够减小手腕关节的体积且减小手腕关节的质量,从而能够有效提高手腕关节活动的灵活性以及精确度;
30、2.具有较高的动力传递效果,从而能够进一步提高手腕关节活动的灵活性以及精确度;
31、3.小臂关节具有较高的结构强度且质量分布均匀,能够减小小臂关节活动过程中对自身以及手腕关节的损耗。
本文地址:https://www.jishuxx.com/zhuanli/20240720/267695.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表