一种机器人指尖测力传感器的制作方法
- 国知局
- 2024-08-05 13:57:33
本技术涉及机器人传感器领域,特别涉及一种机器人指尖测力传感器。
背景技术:
1、伴随着工业生产技术发展,机器人的应用愈来愈普遍,其工作效能大大提升了公司的生产量。但是,工业机械手不能够很好地检测周边环境,必须与专业仪器设备融合才能达到作用。更不用说目前正在大力开发的人形智能机器人,其工作过程中与物体的细微接触敏感度仍然是目前的主要难题。
2、马克斯普朗克智能系统研究所 (mpi-is) 的一组科学家介绍了一种名为“insight”的强大软触觉传感器,它使用计算机视觉和深度神经网络准确估计物体与传感器接触的位置以及施加的力有多大。该研究项目是朝着机器人能够像人类和动物一样准确地感知周围环境迈出的重要一步。与其天然对应物一样,指尖传感器非常灵敏、坚固且分辨率高。但是这种方式计算量非常庞大,且工作周期漫长,成本造价无比高昂,让人形机器人的大规模量程变的遥遥无期。
3、还有一部分研究方向则是在机器人指尖部分安装六维力测力传感器,机器人在与外部环境接触时受到的力和力矩等可以通过安装在指尖上的力感知传感器测量,能够为机器人提供感知力或是力矩的环境,主要包括物体外部形状跟踪、直接示教的机器人零力控制、多臂协同工作、防物体掉落的自动装卸、参与医疗外科手术、协助病人的康复锻炼等。而之前国内工程项目所使用传感器主要依靠进口,但是这种方式存在种种弊端,例如进口价格是国产价格的数倍之多、采购时间长、延误工期等等。另外,进口国外传感器在使用一年左右后会发生飘移、测量不准确,需要返回到国外重新标定,大约3个月左右,这样,既花费费用,又耽误了一段时间。
技术实现思路
1、本实用新型的目的是提供一种机器人指尖测力传感器,具有外观小巧、适应大部分机器人手部应用场合、安装简单、精度高、响应频率快、成本低、大批量生产、输出的模拟量信号可直接连接机器人控制端的优点。
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:
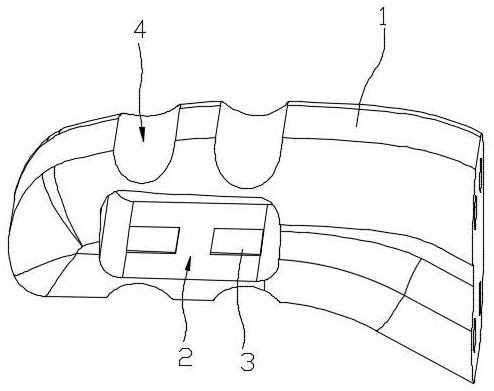
3、一种机器人指尖测力传感器,其特征在于:包括呈指尖状的弹性体,所述弹性体横向放置,所述弹性体的前侧部的左侧开设有贯穿弹性体前侧部至后侧部的方形穿孔,所述方形穿孔的内部顶壁与内部底壁均贴有应变计,所述弹性体的顶部与底部均开设有两个纵向的第一弧形槽,每个所述第一弧形槽均贯穿弹性体的前侧部与后侧部,每个所述第一弧形槽的位置均与方形穿孔的位置相对应;
4、所述弹性体的前侧部开设有第二弧形槽,所述第二弧形槽贯穿弹性体的右侧部与方形穿孔的内部右侧壁。
5、综上所述,本实用新型具有以下有益效果:
6、机器人手指的指尖部分在进行捏、抓、压等动作时,指尖的指腹承担80%的正方向力,排除掉部分特殊动作时,指腹处测量的单向力能满足大部分机器人手部应用场合。模仿手指尺寸设计了一种机器人指尖测力传感器,相对于五维力和六维力传感器成本降低数十倍。
7、仿真手指尖尺寸设计平行梁结构弹性体,以电阻应变计为转换原件,通过高温固化的方式将电阻应变计与机器人指尖测力传感器应变梁紧密贴合,当此机器人指尖测力传感器受到外力时,内部附着贴合的电阻应变计发生变形,电阻应变计再将变形转换为电阻值的变化,从而可以达到测量力值变化的目的。结合组桥过程中的温度补偿,极大降低室内外环境对测试数据的影响。
8、弹性体的原材料材料选择不锈钢,热处理硬度满足hrc42~47,这样可以保证机器人指尖测力传感器强度会更好,性能也会更稳定,贴片方式大采用4个单片,组成惠斯通电桥,对于应变计的夹紧过程需使用特质工装,避免了产品测试过程中零点较大的问题,固化箱温度调整至165℃时间持续4.5h,使应变计下的胶水完全挤压出来,应变计与弹性体充分贴合。
9、该机器人指尖测力传感器成品精度可以达到0.1%,响应频率接近3ms,直接输出模拟量信号,可直接连接机器人控制端,方便计算云端做出更快反馈。
技术特征:1.一种机器人指尖测力传感器,其特征在于:包括呈指尖状的弹性体(1),所述弹性体(1)横向放置,所述弹性体(1)的前侧部的左侧开设有贯穿弹性体(1)前侧部至后侧部的方形穿孔(2),所述方形穿孔(2)的内部顶壁与内部底壁均贴有两个应变计(3),所述弹性体(1)的顶部与底部均开设有两个纵向的第一弧形槽(4),每个所述第一弧形槽(4)均贯穿弹性体(1)的前侧部与后侧部,每个所述第一弧形槽(4)的位置均与方形穿孔(2)的位置相对应;
技术总结本技术公开了一种机器人指尖测力传感器,包括呈指尖状的弹性体,弹性体横向放置,弹性体的前侧部的左侧开设有贯穿弹性体前侧部至后侧部的方形穿孔,方形穿孔的内部顶壁与内部底壁均贴有两个应变计,弹性体的顶部与底部均开设有两个纵向的第一弧形槽,每个第一弧形槽均贯穿弹性体的前侧部与后侧部,每个第一弧形槽的位置均与方形穿孔的位置相对应;弹性体的前侧部开设有第二弧形槽,第二弧形槽贯穿弹性体的右侧部与方形穿孔的内部右侧壁。本技术具有外观小巧、适应大部分机器人手部应用场合、安装简单、精度高、响应频率快、成本低、大批量生产、输出的模拟量信号可直接连接机器人控制端的优点。技术研发人员:施文俊受保护的技术使用者:费波斯测量技术(常州)有限公司技术研发日:20231219技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240720/270089.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种智能防丢器的制作方法
下一篇
返回列表