一种无人机自动归中平台的制作方法
- 国知局
- 2024-08-01 05:25:35
本技术涉及位置校准领域,特别涉及一种无人机自动对中平台。
背景技术:
1、随着技术的不断发展,在军警执勤或执行任务时,常会配备无人机以辅助执行任务;而无人机通过gps进行位置和方向定位,在着陆时,通过视觉定位的方式进行降落,但因定位误差,无法保证无人机着落在平台的正中间;而如果停机位置偏移,平台下降至时,无人机无法顺利的进入收纳仓。每次降落均需要人工确定无人机位置,并通过人工调整无人机位置;而针对一些特种无人机,其体积大,且重量大,人工位置调整非常不便。
技术实现思路
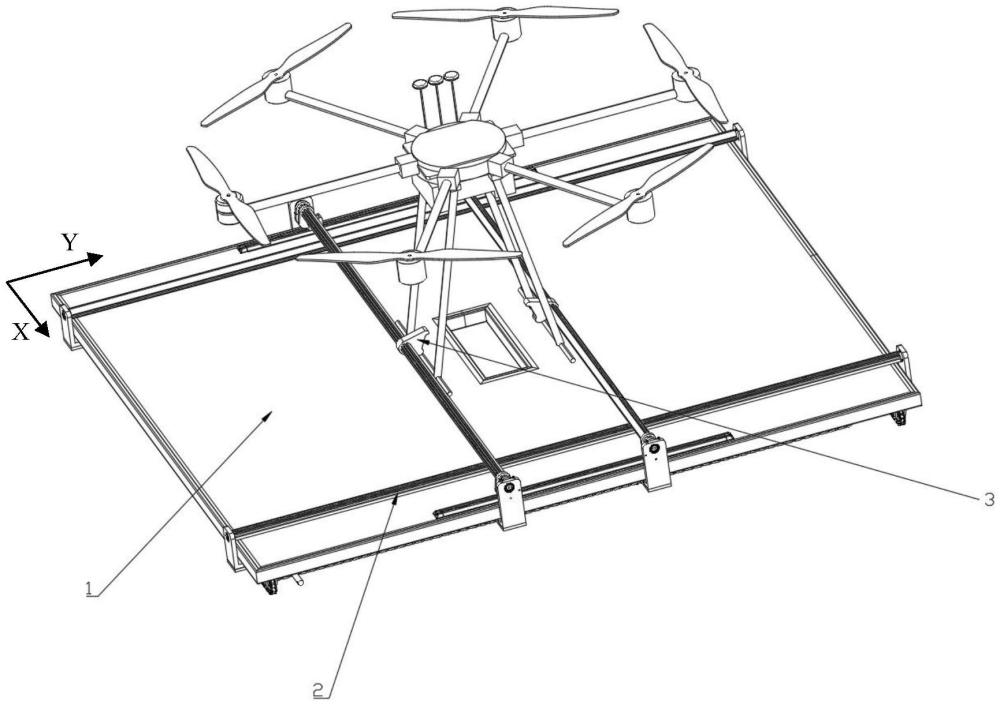
1、针对以上现有技术存在的缺陷,本实用新型的主要目的在于克服现有技术的不足之处,公开了一种无人机自动归中平台,包括停机板、设置在所述停机板上的两组归中组件;利用两组所述归中组件以调整无人机在x轴和y轴方向的位置;
2、所述归中组件包括归中杆、滑块、导轨和驱动组件,所述归中杆平行设置在所述停机板的上方,并且设置在所述停机板中线的两侧,所述停机板底部的两侧平行设置导轨,所述归中杆的两端分别通过滑块与所述导轨连接,利用所述驱动组件控制两根所述归中杆相向移动或反向移动。
3、进一步地,所述驱动组件包括两组链条组件、连杆和伺服电机,两组链条组件设置在所述停机板的底部,所述链条组件包括主动齿轮、从动齿轮和链条,所述主动齿轮和所述从动齿轮转动设置在所述停机板底部,所述链条连接所述主动齿轮和所述从动齿轮,所述连杆连接两组所述链条组件的所述主动齿轮,利用所述伺服电机驱动所述连杆转动,以带动所述链条运行;所述归中杆的同端的两个滑块分别连接所述链条的上部和下部。
4、进一步地,还包括锁定组件,利用所述锁定组件固定无人机的支撑架;
5、所述锁定组件包括压块、扭转弹簧、第一限位块、第二限位块、挡块和驱动块,所述压块设置在所述归中杆上,通过所述压块固定无人机的支撑架;所述归中杆的两端与所述滑块转动连接,所述扭转弹簧连接所述归中杆和所述滑块,利用所述扭转弹簧驱动所述归中杆转动;所述第一限位块和所述第二限位块分别设置在所述归中杆和所述滑块上,利用所述第一限位块和所述第二限位块配合限制所述归中杆转动范围;所述挡块设置在所述停机板上,所述驱动块设置在所述归中杆上;当所述驱动组件驱动所述归中杆向中心移动到达指定位置后,所述驱动块与所述挡块接触,以驱动所述归中杆转动,并同步带动所述压块转动压紧在无人机的支撑架上。
6、进一步地,所述锁定组件还包括调节组件,所述挡块通过所述调节组件安装在所述停机板上,利用所述调节组件调整所述挡块水平位置。
7、进一步地,所述调节组件包括滑轨、调节块和锁紧螺栓,所述滑轨内设置t形滑槽,所述调节块为与所述t形滑槽配合的块状结构,所述调节块置于所述t形滑槽内,所述挡块通过所述锁紧螺栓与所述调节块连接。
8、进一步地,所述第二限位块为限位螺栓。
9、本实用新型取得的有益效果:
10、本实用新型在停机板上设置归中组件,通过归中杆水平推动无人机调整位置,实现无人机归中。在归中杆上安装压块,通过转动归中杆以控制压块在打开和压紧位置之间切换,并配合挡块和驱动块,实现归中杆到位自动锁定,避免在移动途中发生不必要的碰撞。
技术特征:1.一种无人机自动归中平台,其特征在于,包括停机板、设置在所述停机板上的两组归中组件;利用两组所述归中组件以调整无人机在x轴和y轴方向的位置;
2.根据权利要求1所述的一种无人机自动归中平台,其特征在于,所述驱动组件包括两组链条组件、连杆和伺服电机,两组链条组件设置在所述停机板的底部,所述链条组件包括主动齿轮、从动齿轮和链条,所述主动齿轮和所述从动齿轮转动设置在所述停机板底部,所述链条连接所述主动齿轮和所述从动齿轮,所述连杆连接两组所述链条组件的所述主动齿轮,利用所述伺服电机驱动所述连杆转动,以带动所述链条运行;所述归中杆的同端的两个滑块分别连接所述链条的上部和下部。
3.根据权利要求1所述的一种无人机自动归中平台,其特征在于,还包括锁定组件,利用所述锁定组件固定无人机的支撑架;
4.根据权利要求3所述的一种无人机自动归中平台,其特征在于,所述锁定组件还包括调节组件,所述挡块通过所述调节组件安装在所述停机板上,利用所述调节组件调整所述挡块水平位置。
5.根据权利要求4所述的一种无人机自动归中平台,其特征在于,所述调节组件包括滑轨、调节块和锁紧螺栓,所述滑轨内设置t形滑槽,所述调节块为与所述t形滑槽配合的块状结构,所述调节块置于所述t形滑槽内,所述挡块通过所述锁紧螺栓与所述调节块连接。
6.根据权利要求3所述的一种无人机自动归中平台,其特征在于,所述第二限位块为限位螺栓。
技术总结本技术公开了一种无人机自动归中平台,包括停机板、设置在停机板上的两组归中组件;利用两组归中组件以调整无人机在X轴和Y轴方向的位置;归中组件包括归中杆、滑块、导轨和驱动组件,归中杆平行设置在停机板的上方,并且设置在停机板中线的两侧,停机板底部的两侧平行设置导轨,归中杆的两端分别通过滑块与导轨连接,利用驱动组件控制两根归中杆相向移动或反向移动。本技术在停机板上设置归中组件,通过归中杆水平推动无人机调整位置,实现无人机归中。在归中杆上安装压块,通过转动归中杆以控制压块在打开和压紧位置之间切换,并配合挡块和驱动块,实现归中杆到位自动锁定,避免在移动途中发生不必要的碰撞。技术研发人员:李东锁,鲍俊威,陈栋受保护的技术使用者:太仓东泰精密机械有限公司技术研发日:20230705技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219677.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表