一种大型水陆两栖飞机的迎角保护控制方法与流程
- 国知局
- 2024-08-01 05:26:52
本发明涉及但不限于飞行控制系统,尤指一种大型水陆两栖飞机的迎角保护控制方法。
背景技术:
1、大型水陆两栖飞机执行灭火任务时,经常在山区中以较小速度飞行,并在必要时进行跃升机动。相较于常规运输机,该类飞机进入大迎角范围的频次显著增加,对迎角保护功能进入与退出的瞬态有着更高要求,在迎角保护进入和退出时,飞机不能有明显瞬态干扰飞行员在山区中的机动,飞行员对于该功能的感受应是顺滑的。
2、传统迎角保护通过迎角保护指令与控制增稳指令取大值的方式进行指令切换,极易在取大值的过程中,因取大值所确定出的指令突变造成切换瞬态。
技术实现思路
1、本发明的目的:为了解决上述技术问题,本发明实施例提供了一种大型水陆两栖飞机的迎角保护控制方法,以解决现有迎角保护方案,由于通过迎角保护指令与控制增稳指令取大值的进行指令切换,极易在取大值的过程中因指令突变造成切换瞬态的问题。
2、本发明的技术方案:本发明实施例提供一种大型水陆两栖飞机的迎角保护控制方法,包括:
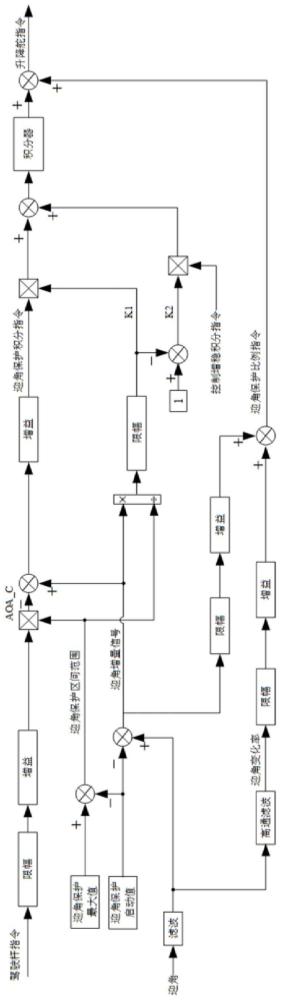
3、步骤1,对迎角保护功能所使用信号分别进行限幅以及滤波处理,所使用信号包括:迎角信号,马赫数信号,驾驶杆位移信号;
4、步骤2,根据马赫数和襟翼构型确定迎角保护最大值和迎角保护启动值;
5、步骤3,根据滤波后的迎角、迎角变化率、迎角保护启动值以及迎角保护最大值,计算出迎角保护权重系数与控制增稳权重系数;
6、步骤4,对滤波后的驾驶杆位移信号通过指令转换得到迎角增量指令;
7、步骤5,将迎角增量指令与滤波后的迎角和迎角变化率进行综合后,经过迎角保护算法计算得到迎角保护积分支路指令、迎角保护比例支路指令和迎角保护微分支路指令;
8、步骤6,将迎角保护积分支路指令、迎角保护比例支路指令、迎角保护微分支路指令与控制增稳功能指令进行综合得到迎角保护升降舵指令。
9、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤1包括:
10、将驾驶杆位移通过低通滤波器后再经过限幅得到迎角保护驾驶杆位移信号;其中,限幅上限为0,限幅下限为驾驶杆位移负方向最小值de_min;
11、将迎角经过低通滤波处理后,得到滤波后的迎角信号;将滤波后的迎角信号经过高通滤波得到迎角变化率;
12、对马赫数经过滤波处理后,得到滤波后的马赫数信号,以减少信号带来的噪声。
13、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤2包括:
14、步骤21,根据飞机在不同襟翼构型和不同马赫数下的失速特性得到迎角保护最大值aoa_max,该值根据襟翼和滤波后马赫数插值得到。
15、步骤22,根据飞机在不同襟翼构型和不同马赫数下的气动特性,确定迎角保护区间范围△aoa_zone;
16、步骤23,根据迎角保护最大值aoa_max和迎角保护区间范围△aoa_zone,得到迎角保护启动值aoa_prot。
17、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤3包括:
18、步骤31,根据滤波后的迎角、迎角变化率、迎角保护启动值aoa_prot以及迎角保护最大值aoa_max,通过加权系数算法计算得到迎角保护权重系数k1;
19、步骤32,通过迎角保护权重系数k1得到控制增稳权重系数k2=1-k1;其中,k1和k2的取值范围均在0到1之间。
20、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤31包括:
21、通过加权系数算法计算初始迎角保护权重系数k为:
22、
23、其中,α为滤波后的迎角,kd_aoa为迎角变化率增益,即为控制律的设计变量;
24、将初始迎角保护权重系数k经过限幅后得到迎角保护权限系数k1。
25、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤4包括:
26、步骤41,将滤波后的驾驶杆位移信号除以de_min,对迎角保护驾驶杆信号进行归一化处理得到归一化的驾驶杆位移信号;
27、步骤42,将归一化的驾驶杆位移信号乘以迎角保护区间范围△aoa_zone得到迎角增量指令值△aoa_cmd。
28、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤5包括:
29、步骤51,将滤波后的迎角与迎角保护启动值aoa_prot做差后经过单边正限幅后得到迎角增量信号△aoa;
30、步骤52,将迎角增量信号△aoa减去迎角增量指令值△aoa_cmd后乘以迎角保护积分增益ki_aoa后得到迎角保护积分指令aoa_i_cmd;
31、步骤53,将迎角变化率信号乘以增益kd_aoa后经过限幅后得到迎角保护微分指令aoa_d_cmd;
32、步骤54,将迎角增量信号△aoa乘以增益kp_aoa得到迎角保护比例指令aoa_p_cmd。
33、可选地,如上所述的大型水陆两栖飞机的迎角保护控制方法中,所述步骤6包括:
34、步骤61,将迎角保护积分指令aoa_i_cmd乘以迎角保护权重系数k1的值,与控制增稳积分指令cas_i_cmd乘以控制增稳权重系数k2的值叠加得到积分指令后进入积分器计算得到升降舵积分指令;
35、步骤62,将迎角保护微分指令aoa_d_cmd和迎角保护比例指令aoa_p_cmd与控制增稳功能指令进行叠加,以实现大型水陆两栖飞机迎角保护功能。
36、本发明实施例还提供一种计算机可读存储介质,包括:存储器和处理器;
37、所述存储器,被配置为保存可执行指令;
38、所述处理器,被配置为在执行所述存储器保存的所述可执行指令时实现如上述任一项所述的大型水陆两栖飞机的迎角保护控制方法。
39、本发明的有益效果:本发明实施例提供一种大型水陆两栖飞机的迎角保护控制方法,采用该迎角保护控制方法,可以实现高迎角保护功能,当迎角达到迎角保护起限值时,迎角保护功能接入,一定程度上减少迎角变大的趋势,当迎角即将到达迎角最大值时,通过迎角保护功能,将迎角一直限制在迎角最大值范围内。采用本发明实施例的技术方案,实现迎角保护功能进入与退出时飞机无明显瞬态,并在大迎角状态下,通过迎角保护算法,实现精确的驾驶杆指令迎角的控制与保护,增强飞行员对于飞机剩余机动能力控制的线性感受。本发明实施例提供的迎角保护控制方法,已经进行过多轮次的试飞员模拟器验证,一致认为本发明的高迎角保护功能对于大型水陆两栖飞机安全性和操纵特性的提高有着显著的效果。
技术特征:1.一种大型水陆两栖飞机的迎角保护控制方法,其特征在于,包括:
2.根据权利要求1所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤2包括:
4.根据权利要求3所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤3包括:
5.根据权利要求4所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤31包括:
6.根据权利要求4所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤4包括:
7.根据权利要求6所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤5包括:
8.根据权利要求7所述的大型水陆两栖飞机的迎角保护控制方法,其特征在于,所述步骤6包括:
9.一种计算机可读存储介质,其特征在于,包括:存储器和处理器;
技术总结本发明实施例公开了一种大型水陆两栖飞机的迎角保护控制方法,包括:对迎角保护功能所使用信号分别进行限幅以及滤波处理;根据马赫数和襟翼构型确定迎角保护最大值和迎角保护启动值;计算迎角保护权重系数与控制增稳权重系数;对滤波后的驾驶杆位移信号通过指令转换得到迎角增量指令;计算得到迎角保护积分支路指令、迎角保护比例支路指令和迎角保护微分支路指令;将迎角保护积分支路指令、迎角保护比例支路指令、迎角保护微分支路指令与控制增稳功能指令进行综合得到迎角保护升降舵指令。本发明实施例提供的技术方案解决了现有迎角保护方案,极易在取大值的过程中因指令突变造成切换瞬态的问题。技术研发人员:骞恒浩,占正勇,孟杨,王敏文,牛尔卓,杨江受保护的技术使用者:中国航空工业集团公司西安飞行自动控制研究所技术研发日:技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219803.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表