一种适用于强扰动环境的全驱型塔型特种旋翼无人机
- 国知局
- 2024-08-01 05:28:06
本发明属于无人机,具体涉及一种适用于强扰动环境的全驱型塔型特种旋翼无人机。
背景技术:
1、悬停式无人机具有定点起降、高空悬停等优点,被广泛应用于各种领域,其中,多旋翼无人机具有研发成本低、系统架构简单等特点,成为众多领域应用的首选,比如用于巡检和悬停任务的多旋翼无人机、用于长航时悬停的系留无人机等。传统的多旋翼无人机普遍采用半驱动控制架构,通过分解动力系统输出纵向升力和横向调姿力。该架构能够以较少的硬件设备(尤其是动力电机)实现稳定悬停。
2、然而,传统的多旋翼无人机受到气流/系留线缆等外力因素产生的强扰动时,容易出现姿态失稳的情况,主要原因是该无人机姿态调节和高度调节方面采用同一动力电机实现,导致纵向和横向输出具有天然的耦合效应。虽然控制算法层面将姿态控制和高度控制算法进行解耦,但最终输出力会耦合在同一设备中。因此,当无人机受到突发的强外力扰动所产生的荷载时,无人机难以及时并且快速地稳定姿态角度和悬停高度,严重时无人机会产生姿态紊乱,无法通过控制系统使其收敛而导致坠毁。
3、因此,传统多旋翼无人机的抗强扰动能力相对较弱,难以应用于复杂气流环境或复杂海况环境等特种应用环境中,更难以应用在高度较高的系留无人机系统中,因为其调姿力难以克服长系留线缆施加给无人机的强扰动力。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种适用于强扰动环境的全驱型塔型特种旋翼无人机。本发明要解决的技术问题通过以下技术方案实现:
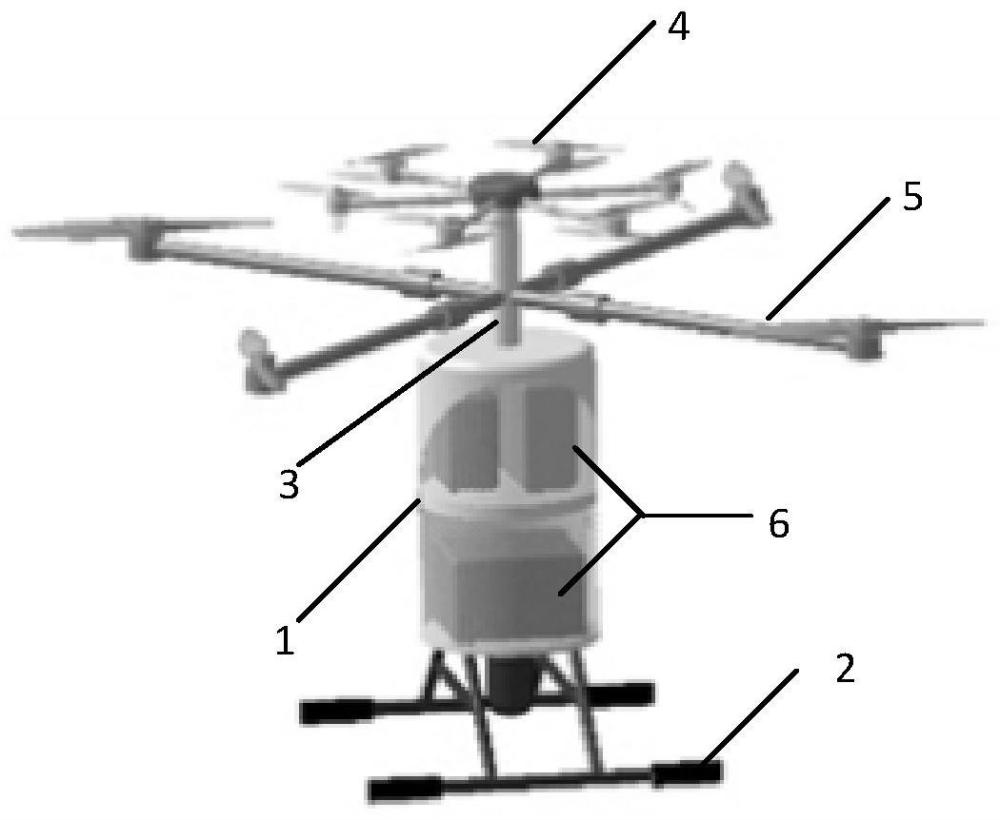
2、本发明提供了一种适用于强扰动环境的全驱型塔型特种旋翼无人机,包括机舱、起落架、安装支架、升力电机组、调姿电机组和航电分系统,其中,
3、所述起落架固定在所述机舱下端,所述安装支架垂直设置在机舱上端;
4、所述升力电机组包括多个升力电机安装轴,所述多个升力电机安装轴的一端水平间隔固定至所述安装支架的侧壁,另一端分别设置有一个升力螺旋桨,每个所述升力螺旋桨的下连接有一个升力电机,每个升力电机均设置在对应的升力电机安装轴上并电连接所述航电分系统,所述升力电机组用于在所述航电分系统的控制下输出克服无人机重力的升力;
5、所述调姿电机组包括多个调姿电机安装轴,所述多个调姿电机安装轴的一端水平间隔固定至所述安装支架的侧壁,另一端分别设置有一个调姿螺旋桨,每个所述调姿螺旋桨的下连接有一个调姿电机,每个调姿电机均设置在对应的调姿电机安装轴上并电连接所述航电分系统,所述调姿电机组用于在所述航电分系统的控制下输出稳定无人机姿态的调姿力。
6、在本发明的一个实施例中,所述升力电机安装轴均设置在所述调姿电机安装轴的上方,并且所述升力电机安装轴的长度大于所述调姿电机安装轴的长度。
7、在本发明的一个实施例中,所述升力电机和所述调姿电机为不同功率的电机,所述升力螺旋桨和所述调姿螺旋桨为不同桨距的螺旋桨。
8、在本发明的一个实施例中,所述升力电机组中每个升力电机和每个升力螺旋桨的规格相同,位于同一直线上的升力电机安装轴上的升力电机转向互逆;
9、所述调姿电机组中每个调姿电机和每个调姿螺旋桨规格相同,位于同一直线上的调姿电机安装轴上的调姿电机转向互逆。
10、在本发明的一个实施例中,所述航电分系统包括飞控计算机、传感器和电源模块,其中,
11、所述传感器用于采集无人机的实时姿态参数,所述实时姿态参数包括无人机的实时俯仰角、实时滚转角和实时航向角;
12、所述飞控计算机连接所述升力电机、所述调姿电机和所述传感器,所述飞控计算机用于控制所述升力电机输出克服无人机重力的升力;
13、所述飞控计算机还用于接收无人机的实时姿态参数,并根据所述实时姿态参数和目标姿态参数控制所述调姿电机组输出稳定无人机姿态的调姿力,所述目标姿态参数包括无人机的目标俯仰角、目标滚转角和目标航向角;
14、所述电源模块用于为所述飞控计算机、所述传感器、所述升力电机和所述调姿电机供电。
15、在本发明的一个实施例中,所述适用于强扰动环境的全驱型塔型特种旋翼无人机还包括无线通信模块,所述无线通信模块能够连接地面站或远程控制模块,以接收来自所述连接地面站或远程控制模块的飞行指令并发送至所述飞控计算机,所述飞行指令包括目标俯仰角指令、目标滚转角指令和目标航向角指令。
16、在本发明的一个实施例中,所述飞控计算机包括实际控制指令获取单元和调姿电机参数获取模块,其中,
17、所述实际控制指令获取单元用于对来自所述连接地面站或远程控制模块的目标俯仰角指令v(t)与所述传感器采集的无人机的实时俯仰角y(t)进行处理,获得当前的实际控制俯仰角指令;
18、所述调姿电机参数获取模块用于根据当前的实际控制俯仰角指令,控制所述升力电机和所述调姿电机转动,以获得所需的俯仰角、滚转角和航向角。
19、在本发明的一个实施例中,所述实际控制指令获取单元具体用于:
20、接收来自所述连接地面站或远程控制模块的目标俯仰角指令v(t);利用微分器计算获得所述目标俯仰角指令v(t)对应的角速度指令v1(t)和角加速度指令v2(t);
21、将角速度指令v1(t)和角加速度指令v2(t)与无人机的实时俯仰角y(t)的多阶反馈值z1(t)和z2(t)进行比对,并计算出对应的偏差e1(t)和e2(t);
22、利用偏差e1(t)和e2(t)通过多阶反馈器计算出俯仰通道的理论控制值u(t),并与系统干扰r(t)耦合后,获得当前的实际控制俯仰角指令;
23、对应获得当前的实际控制滚转角指令和实际控制航向角指令。
24、在本发明的一个实施例中,所述调姿电机参数获取模块具体用于:
25、根据所述实际控制俯仰角指令、实际控制滚转角指令和实际控制航向角指令,获得三个输出力矩值,所述三个输出力矩值按照控制测量分配至调姿电机和升力电机,以控制所述调姿电机和所述升力电机转动,使得无人机达到相应的姿态。
26、在本发明的一个实施例中,所述电源模块为锂电池或系留电缆。
27、与现有技术相比,本发明的有益效果有:
28、1、本发明提出一种适用于强扰动环境的全驱型塔型特种旋翼无人机,该旋翼无人机使用不同动力机组输出非复用的纵向升力和横向调姿力。从外观上看,该无人机呈现塔型多层旋翼架构。该架构使无人机姿态调节和高度调节的执行电机天然地实现了解耦,因此动力系统可独立输出正交的横向调姿力和纵向牵引力,具有全驱动的特性。相比于传统半驱动旋翼无人机,本发明具有良好的抗扰动性能,可满足在复杂气象/海况环境、高空系留悬停、悬吊天线等特种应用领域的需求。
29、2、本发明的全驱型塔型特种旋翼无人机,在输出动力方面,采用不同动力组输出纵向动力和横向动力,使动力系统所需的两种力在硬件层面完全解耦,为无人机实现全驱动型控制架构打下基础;在姿态稳定性方面,具有更快的调姿时间和更小的超调量,横向动力输出用于输出调资力矩,该力矩可通过调姿电机组轴长进行调节,轴长越长输出力矩越大,调姿效率越高;在应用方面,本发明使无人机更高的姿态稳定性能,具有良好的抗风性和抗强外力扰动性,可应用于复杂气象环境或复杂海况环境中;在特种应用层,该架构能够支持斜悬停功能,测控应用领域,斜悬停技术主要用于架设柔性悬索线,为悬索线提供足够大的横向动力,增强悬链线抗风荷载的能力。本发明具有天然的解耦特点,因此可使用调资电机独立输出横向拉力,胜任该特种应用环境。
30、以下将结合附图及实施例对本发明做进一步详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240722/219908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表