一种基于被动铰接的升力机身飞行器
- 国知局
- 2024-08-01 05:34:18
本发明涉及无人机,具体涉及一种基于被动铰接的升力机身飞行器。
背景技术:
1、普通旋翼机位置改变需通过姿态改变进行,其位置与姿态耦合。此特性限制了其机动能力以及一些特殊任务上的应用。为了解决此问题,可产生矢量推力的倾转旋翼机应运而生。目前的倾转旋翼机多使用倾转舵机来实现推力器的倾转,而倾转舵机本身及其安装结构造成了重量冗余,舵机的行程限制导致了倾转角度的有限,给控制方案带来额外约束,极端条件下易发生失稳。
技术实现思路
1、本发明要解决的技术问题是提供一种基于被动铰接的升力机身飞行器,其不使用倾转舵机即可实现倾转旋翼的功能,实现了更高的机动性,且无行程范围限制。
2、为解决上述问题,本发明采用如下技术方案:
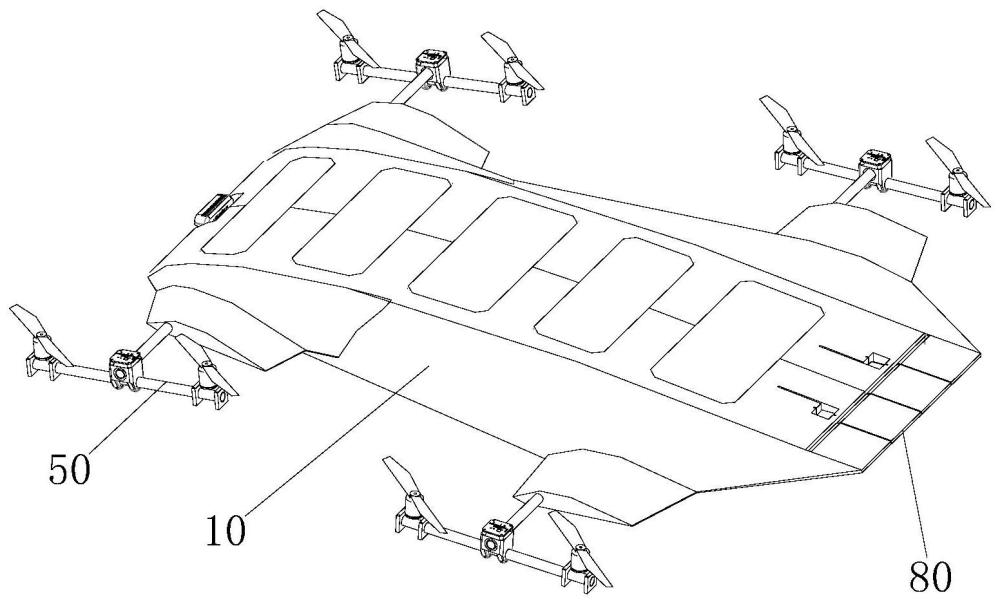
3、一种基于被动铰接的升力机身飞行器,包括升力机身、电源、主控制器、子控制器和多个动力组件。
4、所述升力机身具有机臂,所述动力组件可转动地配置在所述机臂端部。
5、所述动力组件包含有悬臂、连接件和两个推进器。
6、两个所述推进器分别设置在所述悬臂的两端,且两个所述推进器的中轴线与所述悬臂的中轴线垂直。
7、所述连接件固定地配置在所述悬臂的中部。
8、所述连接件配置为与所述机臂转动连接,所述悬臂的中轴线配置为与所述机臂的中轴线垂直。
9、所述推进器配置为与所述子控制器电性连接,所述子控制器配置为与所述主控制器连接。
10、所述子控制器用于根据所述主控制器发布的拉力大小和方向信息控制所述推进器。
11、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,还包括:深度相机和惯性测量单元。
12、所述深度相机和惯性测量单元均与所述主控制器电性连接。
13、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述升力机身尾端设置有尾舵组件。
14、所述尾舵组件配置为与所述主控制器电性连接。
15、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述子控制器和动力组件均设置有四个,且四个所述子控制器与四个所述动力组件一一对应。
16、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述机臂与悬臂均为管状设置。
17、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述连接件包含有:壳体和多个轴承。
18、多个所述轴承均与所述壳体固定连接,且多个所述轴承的中轴线重合。
19、所述机臂配置为通过多个所述轴承与所述壳体转动连接。
20、所述悬臂与所述壳体固定连接,所述子控制器固定地配置在所述壳体上。
21、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述升力机身还具有多个起落架。
22、所述起落架一端配置为与所述升力机身固定连接,所述起落架另一端设置有吸附装置。
23、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述起落架靠近所述升力机身的一端设置有吸能孔。
24、本公开至少一实施例提供的基于被动铰接的升力机身飞行器中,所述升力机身设置有货仓和舱门。
25、所述货仓配置为与所述升力机身铰接连接。
26、本发明的有益效果为:
27、1、对比能够在街道等复杂狭小环境降落起飞的小型旋翼机,本公开具有较大的货仓容积与载重能力,可运载更大体积重量的货物。
28、2、对比拥有较大运载能力的垂直起降固定翼无人机,本公开对起飞降落条件更宽松,无需设置起飞点。同时,本公开可变化自身的姿态,从水平转换到垂直姿态,通过自己较小的截面积顺利通过狭窄的可飞行空域,从复杂的地面环境中起飞,通过位姿解耦的方式解决了大载重与大起降空间的矛盾。
技术特征:1.一种基于被动铰接的升力机身飞行器,其特征在于,包括:升力机身、电源、主控制器、子控制器和多个动力组件;
2.根据权利要求1所述的一种基于被动铰接的升力机身飞行器,其特征在于,还包括:深度相机和惯性测量单元;
3.根据权利要求1所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述升力机身尾端设置有尾舵组件;
4.根据权利要求1所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述子控制器和动力组件均设置有四个,且四个所述子控制器与四个所述动力组件一一对应。
5.根据权利要求1所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述机臂与悬臂均为管状设置。
6.根据权利要求1所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述连接件包含有:壳体和多个轴承;
7.根据权利要求1所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述升力机身还具有多个起落架;
8.根据权利要求7所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述起落架靠近所述升力机身的一端设置有吸能孔。
9.根据权利要求8所述的一种基于被动铰接的升力机身飞行器,其特征在于,所述升力机身设置有货仓和舱门;
技术总结本发明涉及无人机技术领域,具体公开一种基于被动铰接的升力机身飞行器,包括升力机身、电源、主控制器、子控制器和多个动力组件;升力机身具有机臂,动力组件可转动地配置在机臂端部;动力组件包含有悬臂、连接件和两个推进器;两个推进器分别设置在悬臂的两端,且两个推进器的中轴线与悬臂的中轴线垂直;连接件固定地配置在悬臂的中部;连接件配置为与机臂转动连接,悬臂的中轴线配置为与机臂的中轴线垂直;推进器配置为与子控制器电性连接,子控制器配置为与主控制器连接;子控制器用于根据主控制器发布的信息控制推进器;该基于被动铰接的升力机身飞行器不使用倾转舵机即可实现倾转旋翼的功能,机动性高。技术研发人员:刘昆,秦梓杰,曹明志,李昕亮,李开心,魏静波,刘美,王春强,胡嘉豪,俞潇斌,陈伟健受保护的技术使用者:中山大学技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/220450.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表