阻力帆飞行器姿态控制二维平移执行机构
- 国知局
- 2024-08-01 05:34:01
本发明属于航天器离轨领域,具体涉及一种阻力帆飞行器姿态控制执行机构。
背景技术:
1、随着航天技术的不断发展,大规模低轨星座发射计划层出不穷,自从人类发射第一颗人造卫星以来,人类已向太空发射了4000多颗卫星,除去800颗左右还在工作和少数已经离轨的低轨道卫星,大多数卫星已经形成为太空垃圾。目前部分巨星星座计划发射,包括由42000颗卫星组成的spacex星链计划,到2023年2月,星链卫星总量已达4200颗。中国的卫星互联网计划在2021年4月也正式拉开帷幕。综合国际上其他各类大小星座计划,未来数年内在轨运行的小卫星数量将增到50000多颗。
2、由于卫星数量巨大,星座自身受空间碎片的撞击概率较大;其次,小卫星突发故障或者寿命末期后将长期滞留太空成为空间碎片,使得在轨运行卫星的碰撞概率不断增大,甚至导致链式反应,给空间高价值航天器和正常的航天活动带来极为不利的影响。卫星在突发故障或者寿命末期实施高效可靠离轨是解决这一问题的重要途经。目前大多数卫星没有自带有效离轨系统,导致地球轨道上的空间碎片数量也日益增多,成为有效在轨航天器的潜在危险。目前人类技术还无法大范围对已经失效成为空间碎片的航天器进行有效离轨。因此,为今后的卫星配备离轨系统是减缓空间碎片的增长的主要措施。
3、阻力帆离轨方式具有可靠性高,成本低,适用性好等优势,目前已在国内外多个微纳卫星型号上进行了在轨演示验证,未来大规模应用前景广泛。
4、nasa所设计的制动帆离轨装置nanosail-d(22ndannual aiaa/usu)是目前公开报道的制动帆装置中唯一实现了在轨演示验证。该装置占用了星内2u(20cm×10cm×10cm)的空间。
5、加拿大多伦多大学研制了针对20kg级以下的微纳卫星制动帆离轨装置。其主体结构采用3d打印技术,材料为一种新型的碳纤维复合材料(windformxt 2.0),采用这种分块组装设计,不仅使离轨装置安装灵活,同时还降低了离轨装置失效的可能性。当该装置在立方星上应用时,需要占用了星内0.5u(5cm×10cm×10cm)的空间。
6、阻力帆离轨的原理是通过增大气动阻力达到轨道高度衰减的目的,目前多数设计的阻力帆离轨属于被动离轨手段,离轨时间达数年之久,配备离轨帆的航天器在轨道钝化过程中通常采用被动姿态稳定的方式,导致离轨路径不受控制。在成百上千的微纳卫星使用阻力帆减速离轨,离轨过程会无控制穿越多个正常工作的星座层,极大增加碰撞概率。研究表明,非控制离轨阶段的碰撞概率是正常工作阶段的数百倍。
7、质量矩技术非常适用于气动外力作用下的姿态控制,其基于原理是利用飞行器内部若干活动质量块的移动来改变飞行器的质心位置,从而调整飞行器的气动阻力矩来实现姿态机动控制。最早公开报道质量矩控制技术在1984年的再入弹头领域,美国海军水面战研究中心的科学家regan等人为了提高再入弹头的末制导精度,设计出一种单自由度活动质量体配平控制器,能够在接近目标时对轴对称弹道式导弹弹道做适度的修正。2000年美国海军水面战研究中心的科学家chadwich等人最早将质量矩技术用于反导系统动能拦截的制导控制。
8、综上所述,常规阻力帆航天器离轨不受控制,存在巨大安全隐患,质量矩技术引入后可解决阻力帆面航天器难以进行姿态调整的问题。
技术实现思路
1、本发明的目的在于提供一种阻力帆飞行器姿态控制执行机构,适用于8u、中型卫星的离轨,不仅能够解决帮助解决卫星在完成任务后无法在规定时间内脱离轨道从而成为空间碎片的问题,解决卫星未发射阶段完成初步质心调节,而且最重要是解决了一直以来阻力帆航天器姿态控制的问题。
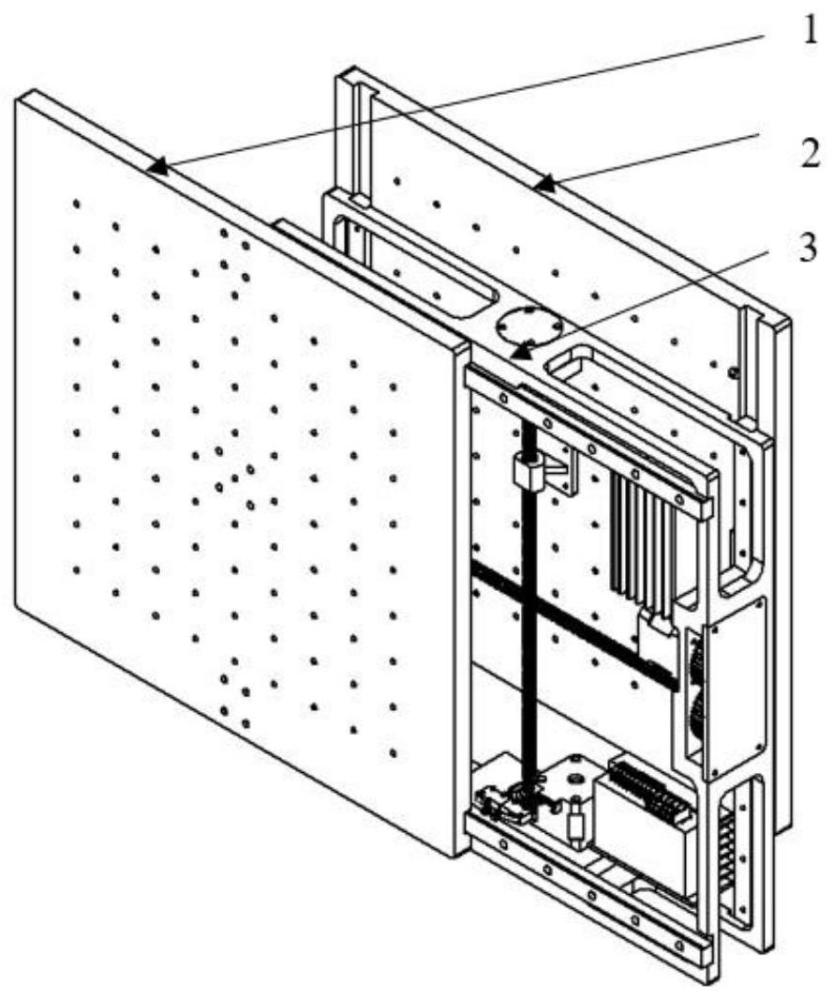
2、实现本发明目的的技术解决方案为:一种阻力帆飞行器姿态控制执行机构,包括xy位移平台框架、第一移动板、第二移动板、梯形丝杠机构、齿轮机构、步进电机、行程限制开关和驱动部件,步进电机以及驱动器安装在平台框架内侧,上第二移动板与运动块固连,运动块安装在两根夹角为90°的丝杠,每根丝杠安装在平台框架两侧内的两个轴承上,框架上下安装两个平行导轨,滑块固定在上第二移动板,齿轮机构安装在步进电机以及丝杠一端,行程限制开关固定在框架内侧;通过齿轮机构将电机动力转达给丝杠,梯形丝杠机构将实现丝杠的转动变成运动块的直线运动,固定在运动块上的第一移动板和第二移动板将通过导轨滑块实现x方向和y方向直线运动,从而实现调整阻力帆相对位置。
3、本发明与现有技术相比,其显著优点在于:
4、(1)本发明体积小、质量轻,完全符合卫星中小型化、轻量化要求,减少对其他系统质量和空间的限制,提高卫星的功能密度。
5、(2)本发明适用范围广,可适用于任何中小型卫星平台,其外形设计充分利用卫星分离机构内的空间,安装在卫星外部,不占用星内空间,即插即用,对卫星内部布局不产生任何影响。
6、(3)本发明在阻力帆壳体与卫星主结构的安装口处引入二维移动,可以调整阻力帆的相对位置,同时形成质量矩控制构型,可实现阻力帆卫星的姿态主动控制,进而使得阻力帆航天器受控离轨成为可能。
7、(4)本发明在第一移动板设计了阵列安装孔,在卫星未发射阶段可以利用阻力帆装置自身重量来对卫星进行初步质心调节。
8、(5)本发明是一套单独的系统,不会增加其他系统的寿命要求,也不会受其他系统是否正常的影响,在不干扰其他系统的同时也保障离轨系统的可靠性。
9、(6)本发明的主框架结构完整性好,整体抗冲击抗振动能力强,确保有效的控制制动帆装置的正常工作。
10、(7)本发明工作原理简单,利用常见的步进电机、齿轮、梯形丝杠、滑块导轨结构即可实现。
11、(8)本发明结构简单,可靠性好,加工成本低,实用性强,非常适用于快速响应、任务周期短的中小型卫星。
技术特征:1.一种阻力帆飞行器姿态控制执行机构,其特征在于:包括第一移动板(1)、第二移动板(2)、平台框架(3)、x方向丝杠(8)、y方向丝杠(11)、第一主动齿轮(12)、第二主动齿轮(20)、第一从动齿轮(13)、第二从动齿轮(21)、第一步进电机(14)、第二步进电机(18)、第一驱动器(15)、第二驱动器(19)、第一运动块(9)、第二运动块(10)、x方向行程限制开关(16)、x方向激光位移传感器(17)、y方向行程限制开关(22)、y方向激光位移传感器(23)、两个x方向轴承(24)、两个y方向轴承(25)、两条x方向导轨(4)、两条y方向导轨(6);x方向导轨(4)上带有一对x方向滑块(5),y方向导轨(6)上带有一对y方向滑块(7);第一运动块(9)设置于x方向丝杠(8)上,x方向行程限制开关(16)、x方向激光位移传感器(17)设置于框架内x方向丝杠(8)一端,通过行程限制开关(16)控制第一运动块(9)的行程,第一运动块(9)与第一移动板(1)固连;第二运动块(10)设置于y方向丝杠(11)上,y方向行程限制开关(22)、y方向激光位移传感器(23)设置于框架内y方向丝杠(11)一端,通过y方向行程限制开关(22)控制第二运动块(10)的行程,第二运动块(10)与第二移动板(2)固连;
2.根据权利要求1所述的阻力帆飞行器姿态控制执行机构,其特征在于:同一个面上的运动块和滑块的运动轨迹必须一致。
3.根据权利要求2所述的阻力帆飞行器姿态控制执行机构,其特征在于:第一移动板(1)上开有阵列安装孔,在卫星未发射阶段可通过调整第一移动板(1)安装位置来对整个卫星进行质心调节;工作状态时,运动块与一组啮合的主动齿轮、从动齿轮构成梯形丝杠机构,梯形丝杠结构将第一步进电机(14)与第二步进电机(18)的转动变为直线运动,由于第一移动板(1)固定在第一运动块(9)上导致第一移动板(1)在x方向滑块(5)和x方向导轨(4)的约束下做直线运动,从而改变阻力帆装置与卫星的相对位置,进一步改变压力中心位置;同理第二移动板(2)固定在第二运动块(10)上控制整个移动平台以及阻力帆装置与卫星的相对位置,从而扩大可控空间,更好的利用气动阻力形成的力矩;同时在第一移动板(1)和第二移动板(2)的行程末端设计了x方向行程限制开关(16)与y方向行程限制开关(22),在控制过程中,当第一移动板(1)或第二移动板(2)移动至最远行程时,会与安装在平台框架(3)内侧的x方向行程限制开关(16)或y方向行程限制开关(22)触碰,之后将阻止第一移动板(1)或第二移动板(2)继续向前运动。
4.根据权利要求3所述的阻力帆飞行器姿态控制执行机构,其特征在于:一组啮合的主动齿轮、从动齿轮构成齿轮机构,齿轮机构采用一对1:1齿轮传动系数;在x方向,第一主动齿轮(12)通过键槽与第一步进电机(14)固定,第一从动齿轮(13)通过键槽与第一丝杠(8)固定;安装在平台内的第一步进电机(14)将通过第一主动齿轮(12)、第一从动齿轮(13)将传动1:1的传给第一丝杠(8)。
5.根据权利要求1所述的阻力帆飞行器姿态控制执行机构,其特征在于:将卫星本体质心为本体坐标系原点,卫星与阻力帆均视为刚体,oe点为地心惯性系原点,om为卫星本体质心;其中矢量rb与rs在惯性系描述,矢量p在卫星本体系描述,阻力帆卫星系统模型为:
技术总结本发明公开了一种阻力帆飞行器姿态控制执行机构,包括平台框架、移动板、步进电机等,固定在框架内部的步进电机驱动移动板实现X、Y方向直线运动;移动板设计阵列安装孔,用于将其安装于卫星背风面上,不占用星内空间,并且可以初步调节卫星质心。本发明的控制机理为,在离轨装置完全展开之后通过调节XY两个方向的移动板来调节离轨装置与卫星本体的相对位置,从而改变卫星质心与气动压心的位置,由此可产生期望气动力矩控制卫星姿态。本发明引入质量矩技术打破了传统帆面航天器难以进行姿态调整的局限,使得配备阻力帆的卫星在离轨处置过程中能进行姿态控制,从而降低离轨碰撞概率。技术研发人员:胡远东,谢昊东,沈海军,孙杰,徐毅,陆正亮受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/220439.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表