身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法
- 国知局
- 2024-07-30 11:02:10
本发明涉及身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,属于仿生水下机器鱼动力测量。
背景技术:
1、目前,身体尾鳍模式仿生水下机器鱼游动推力的实验测量方法有两种,一种是基于高精度力传感器的推力测量方法,一种是基于数字式粒子图像测速设备(digitalparticle image velocimetry,dpiv)的推力计算方法。
2、基于力传感器的推力测量方法,属于直接测量法,需要把被测物体固结或系留于力传感器上,一般只能用于静态推力测量。结合拖曳设备或者水洞也可测量稳态游动时的推力和阻力。然而,由于游动物体的推力和阻力是同时产生的,不易分离,所以这种方法很难用于自由游动物体以及动态推力测量。基于dpiv的推力计算方法,属于间接测量法,首先通过dpiv设备获得游动物体周围流体的速度场信息,然后结合流体力学相关知识通过计算获得推力信息。以上两种推力测量方法都需要配备复杂且昂贵的流场或力的测量设备,程序繁杂耗时。
技术实现思路
1、针对身体尾鳍模式仿生水下机器鱼需要配置测量设备测量推力和阻力,设备复杂并且推力与阻力无法准确分离的问题,本发明提供一种身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法。
2、本发明的一种身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,包括,
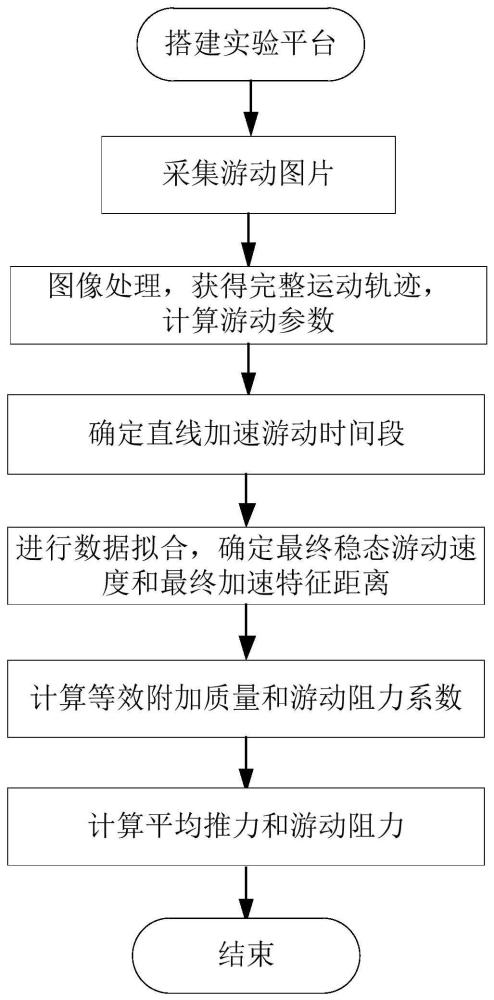
3、搭建水下机器鱼直线加速游动实验平台,按预设驱动信号的频率和幅值控制水下机器鱼由静止开始进行直线加速游动,直到达到稳态游动;采用摄像机连续拍摄水下机器鱼游动全过程的游动图片;
4、对所有游动图片进行图像处理,提取每张游动图片中鱼体中性线的原始鱼体波曲线,并由所有原始鱼体波曲线组成鱼体中性线的完整运动轨迹;对鱼体中性线的完整运动轨迹采用鱼体波重构方法获得水下机器鱼两个摆动周期的实际时均速度、实际尾尖摆幅和实际尾尖处的鱼体波轮廓线斜率;同时采用复模态分解方法确定实际鱼体波波速;
5、对所述实际时均速度进行数据分割,确定直线加速游动的起始时刻和终止时刻,获得直线加速游动时间段;
6、根据时均速度的计算公式,通过调整稳态游动速度和加速特征距离计算直线加速游动时间段内的时均速度估计值,直到时均速度估计值与实际时均速度的比较结果达到设定拟合优度,得到最终稳态游动速度和最终加速特征距离;
7、根据最终稳态游动速度和最终加速特征距离,并结合实际尾尖摆幅计算得到尾尖处的等效附加质量;再根据尾尖处的等效附加质量、实际尾尖处的鱼体波轮廓线斜率和实际鱼体波波速计算得到平均推力和游动阻力。
8、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,所述水下机器鱼直线加速游动实验平台包括水池,水池的长度至少满足水下机器鱼由静止开始直到达到稳态游动需要的距离;水下机器鱼处于水池中心线上游动。
9、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,所述水下机器鱼直线加速游动实验平台还包括摄像机,摄像机的帧速率设置为在水下机器鱼一个摆动周期内至少获得10帧游动图片,且分辨率为每帧游动图片的鱼体中性线上至少存在30个像素点;摄像机为线性模式。
10、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,水下机器鱼的摆动驱动信号为正弦信号,使水下机器鱼游动全过程的摆动频率和摆幅保持恒定,并且水下机器鱼的尾部相对于鱼体中性线对称。
11、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,原始鱼体波曲线的提取方法为:
12、将游动图片由rgb模式图片转换为灰度图片,对灰度图片基于设定的阈值进行二值化处理转换为黑白图片;对黑白图片采用边缘检测算法识别得到水下机器鱼游动的轮廓曲线,提取轮廓曲线位置信息,通过坐标运算得到鱼体中性线的原始鱼体波曲线。
13、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,尾尖处的等效附加质量的计算方法为:
14、
15、式中m(l)为尾尖处的等效附加质量,mfish为水下机器鱼的质量,u∞为最终稳态游动速度,k′为最终加速特征距离,为水下机器鱼身体摆动频率,h(l)为实际尾尖摆幅。
16、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,将尾尖处的等效附加质量m(l)表示为加速时间常数的形式:
17、
18、式中τ为加速时间常数,τ=k′/u∞。
19、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,平均推力的计算方法为:
20、
21、式中<t>为平均推力,u(t)为实际时均速度,t为时间,v为实际鱼体波波速,h′(l)为实际尾尖处的鱼体波轮廓线斜率。
22、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,游动阻力的计算方法为:
23、
24、式中d为游动阻力,ρ为液体密度,cd为游动阻力系数,a为水下机器鱼身体润湿面积,u(t)为实际时均速度,t为时间;
25、
26、式中v为实际鱼体波波速,h′(l)为实际尾尖处的鱼体波轮廓线斜率。
27、根据本发明的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,时均速度的计算公式为:
28、
29、式中u0(t)为时均速度,u0∞为稳态游动速度,k0′为加速特征距离,t为时间;
30、将时均速度u0(t)表示为加速时间常数的形式:
31、
32、式中τ为加速时间常数,
33、本发明的有益效果:本发明方法利用“等幅等频直线加速游动的时均速度是时间的双曲正切函数”原理,进行直线加速游动时推力与阻力的估计。本发明方法适用于鳗鲡科、鲹科和鲔科模式,提供了一种有效且易于实现的游动推力与阻力的估计方法,它通过直线加速游动实验来估计游动的推力和阻力,不需要复杂而昂贵的流场和力测量设备,并且可直接获得推力与阻力的估计值。
34、本发明方法通过处理直线加速游动实验中游动个体的轨迹数据,即可估计计时均推力和阻力,计算方法简单灵活,为传统的推力和阻力测量方法提供了有益的补充。在直线加速游动实验中,只要实验数据满足双曲正切规律,即可以采用本发明方法估计游动参数,获得的游动参数有助于理解机器鱼不同游动模式下的运动特性。
技术特征:1.一种身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于包括,
2.根据权利要求1所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,
3.根据权利要求2所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,所述水下机器鱼直线加速游动实验平台还包括摄像机,摄像机的帧速率设置为在水下机器鱼一个摆动周期内至少获得10帧游动图片,且分辨率为每帧游动图片的鱼体中性线上至少存在30个像素点;摄像机为线性模式。
4.根据权利要求3所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,水下机器鱼的摆动驱动信号为正弦信号,使水下机器鱼游动全过程的摆动频率和摆幅保持恒定,并且水下机器鱼的尾部相对于鱼体中性线对称。
5.根据权利要求4所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,原始鱼体波曲线的提取方法为:
6.根据权利要求5所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,尾尖处的等效附加质量的计算方法为:
7.根据权利要求6所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,
8.根据权利要求7所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,平均推力的计算方法为:
9.根据权利要求7所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,游动阻力的计算方法为:
10.根据权利要求1所述的身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,其特征在于,时均速度的计算公式为:
技术总结一种身体尾鳍模式仿生水下机器鱼直线加速游动的推力与阻力估计方法,属于仿生水下机器鱼动力测量技术领域。本发明针对身体尾鳍模式仿生水下机器鱼需要配置测量设备测量推力和阻力,设备复杂并且推力与阻力无法准确分离的问题。包括搭建水下机器鱼直线加速游动实验平台,控制水下机器鱼由静止开始进行直线加速游动,采集游动图片;进行图像处理,获得原始鱼体波曲线进而得到完整运动轨迹;采用重构方法获得游动参数;在直线加速游动时间段内,进行游动参数的拟合,获得最终稳态游动速度和最终加速特征距离;计算得到等效附加质量和游动阻力系数,进而计算得到平均推力和游动阻力。本发明用于水下机器鱼在直线加速游动时推力与阻力的估计。技术研发人员:姜洪洲受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155175.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表