一种无电流传感器的翼伞伺服控制方法与流程
- 国知局
- 2024-08-01 05:34:32
本发明涉及一种无电流传感器的翼伞伺服控制方法,属于航空航天翼伞智能回收控制技术。
背景技术:
1、随着国内火箭回收专业的逐步发展,当下进入了智能回收火箭的助推器和整流罩的历史阶段,通过智能回收系统控制翼伞进行落区的精密控制,使得火箭发射过程中脱落的助推器和整流罩设备能够自主回收,使其通过翼伞的控制降落到指定区域,完成助推器和整流罩设备的重复利用,同时避免了过去无法主动控制回收区域而对地面建筑和人员财产造成的破坏的问题。
2、在智能回收领域的控制对象主要是翼伞承载的顿级设备。对于大型的翼伞绳拉力需要达到1300公斤,转速6000rpm,输出力矩180nm,伞绳控制精度0.01°,落区控制精度≤20m。高压大功率精密伺服控制器,需解算翼伞的姿态、高度、gps信号后,根据翼伞动力学模型,算出伞绳的长度,改变飞行方向,实现精准的落区控制,回收设备。
3、以永磁同步力矩电机作为驱动机构的伺服系统闭环控制,电流环是能否实现高转速、大力矩输出的关键,在无电流传感器控制中,电阻抗检测控制基于电阻抗测量原理,使用频率调制的技术,通过检测电机绕组端点的电流和电压信号的相位差和幅值变化,实现对电机电流的估计和控制,此方法的运算量大,电流的估计数值噪声较大。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出了一种无电流传感器的翼伞伺服控制方法,建立电流估计器作为电流环的反馈,将不同位置的伞绳的拉力矩补偿条件引入三环控制中,解决在无电流传感器下的高速、大负载翼伞的高精度伺服控制。
2、本发明的技术解决方案是:
3、一种无电流传感器的翼伞伺服控制方法,包括:
4、开展航天器落入大气层后通过翼伞控制回收的地面模拟试验,测量在翼伞伞绳行程范围内,伞绳在不同位置对应负载拉力的力矩特性;
5、建立永磁同步力矩电机模型,根据得到的伞绳在不同位置对应负载拉力的力矩特性,计算伞绳在相应位置时,电机输出的补偿力矩电流;
6、基于电机输出的补偿力矩电流,建立永磁同步电机的磁链方程和电压方程,对两个方程进行拉普拉斯变换、离散化处理后得到电流估计器方程;
7、根据永磁同步力矩电机的直流电机数学模型,设计电流环控制器;
8、将翼伞伞绳的位置信息及对应负载拉力的力矩特性作为电流估计器的力矩补偿输入,将电流估计器的输出作为传感器,将传感器估算的电流与电流环控制器的输入指令做差,作为电流环控制器的输入,通过电流环控制器实现电流环的闭环控制。
9、优选的,建立永磁同步力矩电机模型,根据得到的伞绳在不同位置对应负载拉力的力矩特性,计算伞绳在相应位置时,电机输出的补偿力矩电流,包括:
10、建立永磁同步力矩电机模型:
11、
12、其中,θ表示电机的电角度,ia,ib,ic表示电机的电流三相变量,id,iq表示经过dq变换后的电机直轴、交轴变量电机的电流两相变量;
13、计电机伺服在各位置的输出力矩关系te:
14、te=1.5pλi=-k·x·l
15、其中,p表示电机的极对数,λ表示电机的永磁磁链,l表示拉力到驱动机构轴心的力臂长度,i表示翼伞伞绳在相应位置堵转的电流;
16、对于电机补偿翼伞负载拉力,电机输出的补偿转矩只与交轴电流iq有关,得到翼伞伞绳处于不同位置的补偿力矩电流:
17、
18、优选的,建立永磁同步电机的磁链方程和电压方程:
19、
20、其中,lq,ld表示交直轴电感,ωr表示机械角速度,r表示绕线电阻,ud,uq表示电机直轴、交轴变量电机的电压两相变量。
21、优选的,绕线电阻r采用电桥测取;交直轴电感lq,ld用电压方程在已经绕线电阻和永磁磁链的情况下,通过测试不同负载下的电机转速和交直轴电压电流量,计算得到。
22、优选的,电流估计器方程为:
23、
24、其中,ts表示采样时间,idp、iqp表示估算电流。
25、优选的,基于交直轴之间的耦合影响,对电机直轴、交轴变量电机的电压两相变量进行电动势补偿,将补偿后的电压两项变量作为电流估计器计算的输入值;
26、电机直轴、交轴变量电机的电压两相变量的补偿量为:
27、
28、其中,udr,uqr表示电机直轴、交轴变量电机的电压两相变量的补偿量。
29、优选的,设计电流环控制器,包括:
30、根据永磁同步力矩电机的直流电机数学模型,得到驱动器的传递函数为:
31、
32、其中,l,r表示永磁同步力矩电机的直流电机模型的线圈电感和线圈电阻;s表示拉普拉斯变量;
33、根据传递函数,得到电流环控制器为:
34、
35、其中,τ为可调参数,lq、ld表示交直轴电感。
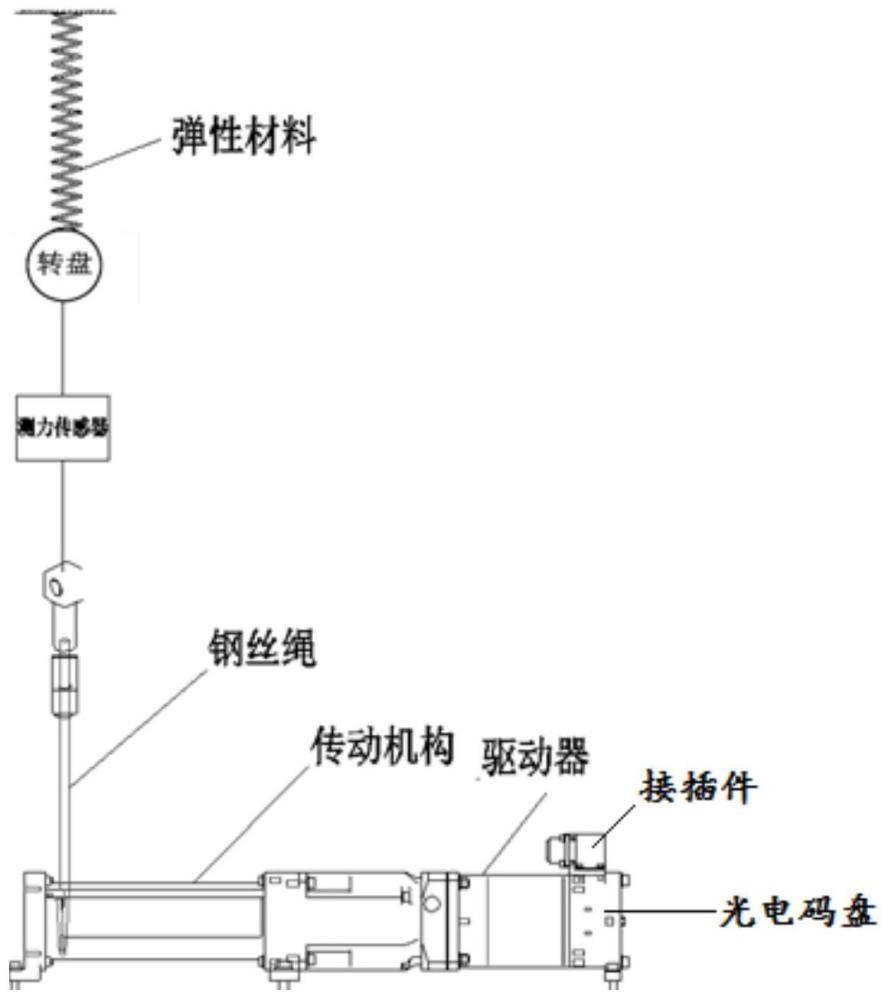
36、优选的,设计翼伞模拟负载试验装置,将翼伞装在所述翼伞模拟负载试验装置下进行所述地面模拟试验;
37、所述翼伞模拟负载试验装置包括驱动器、光电码盘、传动机构、抱闸器、弹性结构、转盘;驱动器的末端连接光电码盘作为位置反馈的传感器,驱动器的前端轴承连接传动机构;传动机构连接转盘,装盘连接一端固定的弹性材料;弹性结构连接转盘形成的组合体用来模拟翼伞的拉力特性;抱闸器位于驱动器内部,作为锁定机构。
38、优选的,所述电流环控制器结合航天器中的位置环控制器、速度环控制器,共同构成三环的闭环控制;将已经闭环的电流环视为常数k,设计速度环控制器,采用频率响应法,将速度环路的开环相角裕度>60°,控制带宽小于伺服控制器的最高控制周期/100,采用pi控制器形式,调教速度环控制器,完成速度环路闭环;设计的位置环控制器,满足速度环路的带宽不大于伺服控制器的最高控制周期/1000。
39、本发明与现有技术相比的优点在于:
40、(1)本发明通过翼伞的模拟负载装置,通过力传感器得到了翼伞的负载特性,作为电流估计的初值,减少了电流整定的时间,消除了电机震荡造成机构损伤的风险。
41、(2)本发明的电流估计方法简单实用,实现了在不应用电流传感器的情况下获取电流信息,且计算过程不繁琐,电流估计值准确,系统稳定高。
技术特征:1.一种无电流传感器的翼伞伺服控制方法,其特征在于,包括:
2.根据权利要求1所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,建立永磁同步力矩电机模型,根据得到的伞绳在不同位置对应负载拉力的力矩特性,计算伞绳在相应位置时,电机输出的补偿力矩电流,包括:
3.根据权利要求2所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,建立永磁同步电机的磁链方程和电压方程:
4.根据权利要求3所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,绕线电阻r采用电桥测取;交直轴电感lq,ld用电压方程在已经绕线电阻和永磁磁链的情况下,通过测试不同负载下的电机转速和交直轴电压电流量,计算得到。
5.根据权利要求3所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,电流估计器方程为:
6.根据权利要求5所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,基于交直轴之间的耦合影响,对电机直轴、交轴变量电机的电压两相变量进行电动势补偿,将补偿后的电压两项变量作为电流估计器计算的输入值;
7.根据权利要求1所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,设计电流环控制器,包括:
8.根据权利要求1所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,设计翼伞模拟负载试验装置,将翼伞装在所述翼伞模拟负载试验装置下进行所述地面模拟试验;
9.根据权利要求1所述的一种无电流传感器的翼伞伺服控制方法,其特征在于,所述电流环控制器结合航天器中的位置环控制器、速度环控制器,共同构成三环的闭环控制;将已经闭环的电流环视为常数k,设计速度环控制器,采用频率响应法,将速度环路的开环相角裕度>60°,控制带宽小于伺服控制器的最高控制周期/100,采用pi控制器形式,调教速度环控制器,完成速度环路闭环;设计的位置环控制器,满足速度环路的带宽不大于伺服控制器的最高控制周期/1000。
技术总结本发明公开了一种无电流传感器的翼伞伺服控制方法,解决在翼伞大拉力负载、高速伺服的工况下的三环控制无法闭环的问题,建立电流估计器作为电流环的反馈,完成电流环的闭环,通过对翼伞的动力学仿真计算得到不同位置的伞绳的拉力矩补偿的条件引入三环控制中,从而解决在无电流传感器下的高速、大负载翼伞的高精度伺服控制,适用于航空、航天的智能回收领域。技术研发人员:鄢南兴,张晗,刘志宏,康建兵,于婷婷,张雅琳,石志成,廖春晖,刘强受保护的技术使用者:北京空间机电研究所技术研发日:技术公布日:2024/5/9本文地址:https://www.jishuxx.com/zhuanli/20240722/220474.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表