一种积木式多栖eVTOL以及其运行方法与流程
- 国知局
- 2024-08-01 05:39:27
本发明涉及无人驾驶飞行器,特别涉及一种积木式多栖evtol以及其运行方法。
背景技术:
1、2023年10月13日亿航智能自主研发的eh216-s无人驾驶载人航空器系统获得中国民用航空局正式颁发的型号合格证(tc),作为全球首个获得tc证的无人驾驶电动垂直起降航空器(evtol),为中国乃至全球创新型evtol的适航认证树立重要标杆,起到领先示范作用,更是开启城市空中交通商业运行的划时代里程碑。
2、然而目前的evtol大多只能在局部场景中进行运行,没有比较完备、可行的常态化商业运行方式,而且受限于电池容量问题,航程受限,无法真正意义上实现没有限制的点对点交通。
3、发明人对evtol实现常态化商业运行存在的问题进行分析,最终,借鉴地面道路运行理念,提出一种evtol运行模式;基于积木思维,设计一款积木式多栖evtol飞行汽车,有效实现地面常规通勤以及空中走廊快速通勤,从而实现点到点的通勤。
技术实现思路
1、本发明要解决的技术问题是提供一种积木式多栖evtol,以解决上述背景技术中的技术问题。
2、为了解决上述技术问题,本发明的技术方案为:
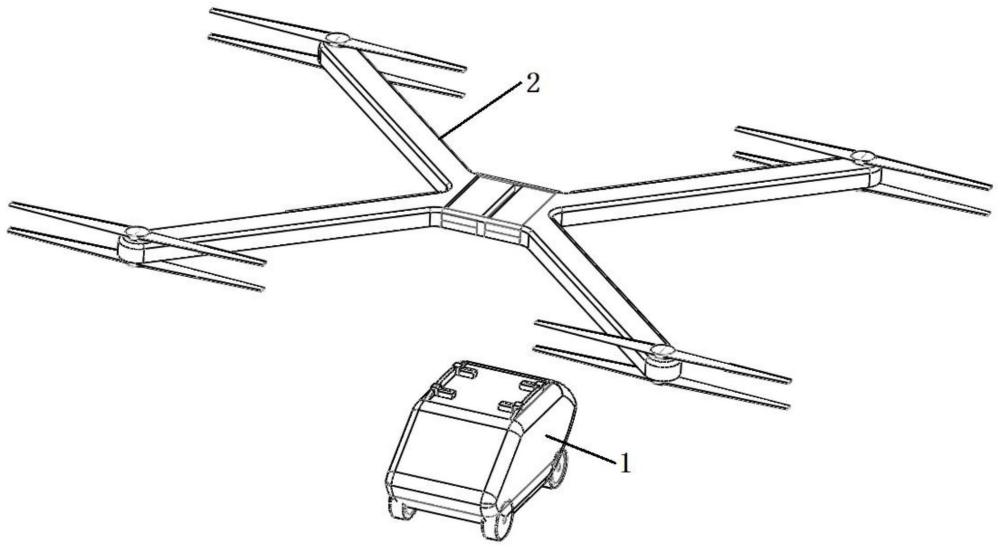
3、一种积木式多栖evtol,包括地面模块以及飞行模块,所述地面模块为车体,保留座舱、座椅、电源系统及操控系统主要部件;所述飞行模块主要实现飞行功能,其有独立的电源系统以及飞控系统,与地面模块采用机械连接的方式集成,其中飞行模块的电源系统中的动力电池为可拆卸更换的设计。
4、进一步的,飞行模块包括多旋翼型,固定翼型、旋翼混合型以及倾转旋翼型。
5、进一步的,地面模块与飞行模块均设置标准机械及电子接口,用于相互集成连接。
6、进一步的,积木式多栖evtol在换电站电池从飞行器的上、下两部分进行更换,地面模块底部所载为常规电池,飞行模块顶部所载为动力电池。
7、本发明还提供了一种积木式多栖evtol的运行方法,包括以下步骤:
8、(1)运行线路设计:包括每个城市设置的一个城市主节点以及若干的区域集散中心;
9、其中出发地或者目的地与区域集散中心的通勤通过地面公路交通实现;载体利用现有公路交通系统,或基于积木式多栖evtol产品的地面模块功能;
10、同城市的若干区域集散中心到城市主节点的通勤通过积木式多栖evtol无人驾驶实现,到达区域集散中心后,地面模块在区域集散中心装载飞行模块,按照统一规划的空中走廊飞行;
11、不同的城市主节点之间通过低空高速走廊实现积木式多栖evtol快速飞行;
12、(2)低空高速走廊设计:沿用现有高铁线路设置低空高速走廊,所述积木式多栖evtol按照规划的低空高速走廊飞行,并于高铁站或者沿高铁沿线布置换电站;
13、(3)网络连接;将积木式多栖evtol运行线路与现有高铁网络相连,增加出行方式的可选择性,提高通勤容量。
14、进一步的,飞行模块在通勤低谷时段通过地面运输、空中自主飞行等方式,实现飞行模块在各个集散中心的调配,以满足预约需求。
15、本发明的优点:
16、本发明借鉴积木思维,采用各功能部件搭积木的方式,设计一款积木式evtol,兼顾地面通勤以及空中通勤,且地面运行时将不再受evtol飞行部件尺寸较大的限制,可以实现自由通勤。同时基于本产品,设计一种具有一定可行性的运行模式,可以有效解决空域容量有限、电池容量有限等问题,实现较长航程的点到点通勤,实现真正意义上没有限制的点对点未来立体交通系统。
技术特征:1.一种积木式多栖evtol,其特征在于:包括地面模块以及飞行模块,所述地面模块为车体,保留座舱、座椅、电源系统及操控系统主要部件;所述飞行模块主要实现飞行功能,其有独立的电源系统以及飞控系统,与地面模块采用机械连接的方式集成,其中飞行模块的电源系统中的动力电池为可拆卸更换的设计。
2.根据权利要求1所述的积木式多栖evtol,其特征在于:所述飞行模块包括多旋翼型,固定翼型、旋翼混合型以及倾转旋翼型。
3.根据权利要求2所述的积木式多栖evtol,其特征在于:所述地面模块与飞行模块均设置标准机械及电子接口,用于相互集成连接。
4.根据权利要求1所述的积木式多栖evtol,其特征在于:所述积木式多栖evtol在换电站电池从飞行器的上、下两部分进行更换,地面模块底部所载为常规电池,飞行模块顶部所载为动力电池。
5.一种如权利要求1-4任一项所述的积木式多栖evtol的运行方法,其特征在于:包括以下步骤:
6.根据权利要求5所述的积木式多栖evtol的运行方法,其特征在于:所述飞行模块在通勤低谷时段通过地面运输、空中自主飞行等方式,实现飞行模块在各个集散中心的调配,以满足预约需求。
技术总结本发明公开了一种积木式多栖eVTOL以及其运行方法,本发明借鉴积木思维,采用各功能部件搭积木的方式,设计一款积木式eVTOL,兼顾地面通勤以及空中通勤,且地面运行时将不再受eVTOL飞行部件尺寸较大的限制,可以实现自由通勤。同时基于本产品,设计一种具有一定可行性的运行模式,可以有效解决空域容量有限、电池容量有限等问题,实现较长航程的点到点通勤,实现真正意义上没有限制的点对点未来立体交通系统。技术研发人员:周宸宇受保护的技术使用者:周宸宇技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/220874.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表