一种无人机自动降落定位装置的制作方法
- 国知局
- 2024-08-01 05:42:14
本技术涉及无人机降落定位,具体为一种无人机自动降落定位装置。
背景技术:
1、无人机归中装置,用于在无人机降落后,进行无人机位置回中操作,包括无人机的充电和无人机状态检测等。
2、由于现有的无人机归中装置无法使无人机和归中平台的充电口进行点对点的精准对接,在充电过程中还需要人员来更换电池或将无人机连接到电源,这意味着高技能的操作员必须出现在充电位置,这显然增加了响应时间和成本,并且这种方式下该系统不能自主地进行操作。
技术实现思路
1、本实用新型要解决的技术问题是克服现有技术的不足,提供一种无人机自动降落定位装置,通过多个支撑臂与四棱锥腔的相互配合,使无人机在缓慢降落的过程中,实现其自动归中的效果,使安装在无人机底部的磁吸头与基座上的磁吸口进行完全扣合,实现无人干预自动充电的效果。
2、为实现上述目的,本实用新型提供如下技术方案:
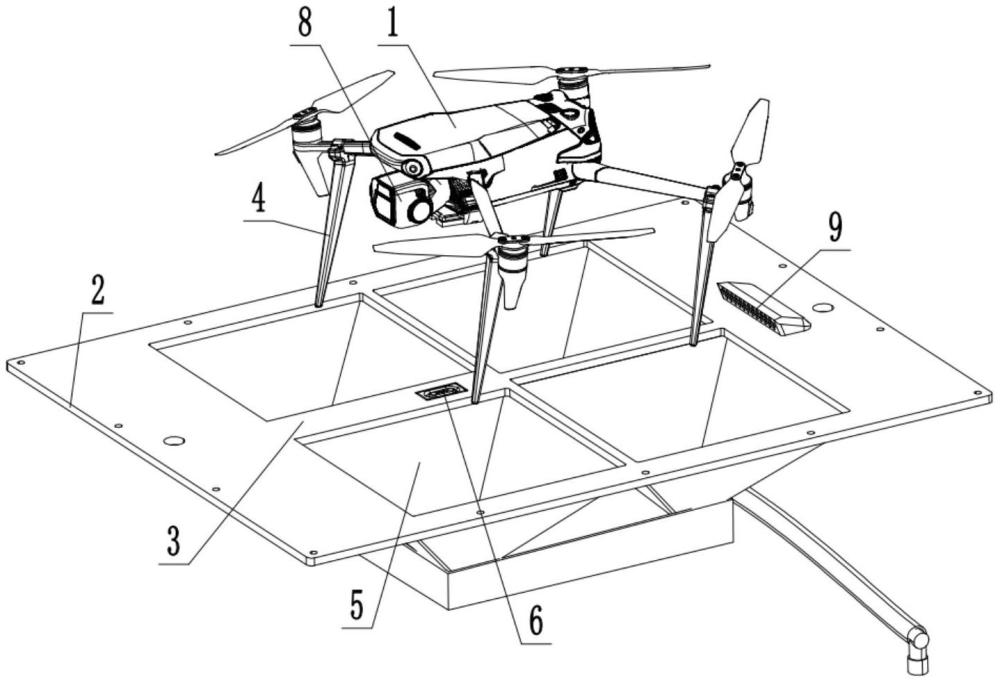
3、一种无人机自动降落定位装置,包括无人机和降落平台,所述无人机的多个悬臂上均斜向安装有支撑臂,所述降落平台包括基座,所述基座上设置有与支撑臂数量相同的四棱锥腔,所述四棱锥腔的尖锐部朝向地面,多个所述四棱锥腔的内壁设置有不同颜色,所述四棱锥腔之间的基座上设置有磁吸口,所述磁吸口与设置在无人机底部的磁吸头相扣合。
4、优选的,所述无人机的机体一端安装有摄像头,所述无人机内置rtk。
5、优选的,所述基座上表面设置有用于摄像头识别的二维码。
6、优选的,所述支撑臂的底端朝向所述四棱锥腔的尖锐部设置。
7、优选的,所述无人机内置电池,所述基座的一侧设置有朝向无人机电池的导风口。
8、优选的,所述四棱锥腔的尖锐部设置有排水孔。
9、优选的,所述四棱锥腔底部设置有集水槽,所述排水孔设置在所述集水槽内部,所述集水槽一侧安装有排水管。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型结构简单,无人机归中时,安装在无人机悬臂上的支撑臂与基座上的四棱锥腔相互配合,无人机缓慢下降的过程中由多个支撑臂与相应的四棱锥腔相互接触,对无人机持续进行位置上的微调,在无人机的自重下缓慢降落,避免人工干预,在无人机完全降落在基座上时,无人机底部的磁吸头与基座上的磁吸口完美扣合,实现自动充电的效果。
12、2、本装置设计合理,通过在四棱锥腔的内壁上涂装不同颜色,通过无人机摄像头识别颜色,调整降落位置,在通过支撑臂与四棱锥腔的相互配合进行进一步的精细位置微调,便于安装在无人机底部不同位置的磁吸头与相应的基座上的磁吸口进行匹配,便于实现无人干预,自行充电的效果。
13、3、本装置的基座上安装有导风口,可以根据天气状况,对无人机电池部分吹送冷风或者热风,对无人机电池提供温度补偿,是电池充电效果达到最佳。
14、4、本装置四棱锥腔底部设置有排水口,雨雪天气无人归中后进行充电时,无人机上的水可以通过排水口排出,避免聚集在四棱锥腔底部,长时间的使用过程中由于水无法排出的原因导致其污损,提高使用寿命。
技术特征:1.一种无人机自动降落定位装置,包括无人机(1)和降落平台(2),所述无人机(1)的多个悬臂上均斜向安装有支撑臂(4),其特征在于,所述降落平台(2)包括基座(3),所述基座(3)上设置有与支撑臂(4)数量相同的四棱锥腔(5),所述四棱锥腔(5)的尖锐部朝向地面,多个所述四棱锥腔(5)的内壁设置有不同颜色,所述四棱锥腔(5)之间的基座(3)上设置有磁吸口(6),所述磁吸口(6)与设置在无人机(1)底部的磁吸头(7)相扣合。
2.根据权利要求1所述的一种无人机自动降落定位装置,其特征在于,所述无人机(1)的机体一端安装有摄像头(8),所述无人机(1)内置rtk。
3.根据权利要求2所述的一种无人机自动降落定位装置,其特征在于,所述基座(3)上表面设置有用于摄像头(8)识别的二维码。
4.根据权利要求3所述的一种无人机自动降落定位装置,其特征在于,所述支撑臂(4)的底端朝向所述四棱锥腔(5)的尖锐部设置。
5.根据权利要求4所述的一种无人机自动降落定位装置,其特征在于,所述无人机(1)内置电池,所述基座(3)的一侧设置有朝向无人机(1)电池的导风口(9)。
6.根据权利要求5所述的一种无人机自动降落定位装置,其特征在于,所述四棱锥腔(5)的尖锐部设置有排水孔(10)。
7.根据权利要求6所述的一种无人机自动降落定位装置,其特征在于,所述四棱锥腔(5)底部设置有集水槽(11),所述排水孔(10)设置在所述集水槽(11)内部,所述集水槽(11)一侧安装有排水管(12)。
技术总结本技术涉及无人机降落定位技术领域,具体为一种无人机自动降落定位装置,包括无人机和降落平台,所述无人机的多个悬臂上均斜向安装有支撑臂,所述降落平台包括基座,所述基座上设置有与支撑臂数量相同的四棱锥腔,所述四棱锥腔的尖锐部朝向地面,多个所述四棱锥腔的内壁设置有不同颜色,所述四棱锥腔之间的基座上设置有磁吸口,所述磁吸口与设置在无人机底部的磁吸头配合充电。无人机归中时,安装在无人机悬臂上的支撑臂与基座上的四棱锥腔相互配合,无人机缓慢下降的过程中由多个支撑臂与相应的四棱锥腔相互接触,对无人机持续进行位置上的微调,在无人机的自重下缓慢降落,避免人工干预,实现自动充电的效果。技术研发人员:邓海波,李小龙,葛玉鑫,孙书明受保护的技术使用者:智洋创新科技股份有限公司技术研发日:20231018技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240722/220998.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表