高升阻比飞行器变体气动控制方法与流程
- 国知局
- 2024-08-01 05:42:51
本发明涉及飞行器气动设计,尤其涉及一种高升阻比飞行器变体气动控制方法。
背景技术:
1、对于高升阻比宽速域飞行器,尤其是需要完成水平起降、重复使用的任务需求来说,其飞行速度跨度大,传统固定外形难以始终保持良好的气动特征和操作品质。具体来说,可能存在以下困难:
2、1)从巡航性能看,飞行器从地面至临近空间、空域跨度极大,大气密度降低几个量级,同时飞行速域和马赫数范围跨越低速不可压、亚跨超至高超声速。不同速域、空域巡航对飞行器升力面面积、空间和平面形状、翼型形式的要求差异巨大,固定外形飞行器难以做到性能最优;
3、2)从作战任务的需求看,如要求临近空间高速飞行器满足地面低速短距水平起降、高空高超声速巡航突防和低空高机动格斗,固定外形将无法同时满足这些需求;
4、3)从操纵效能来看,高升阻比飞行器在面对大空域、宽速域执行不同飞行任务时,其大升力面使得压心、焦点和操纵面舵效变化巨大,传统气动舵面结合推力矢量、喷流直接力控制也无法满足飞行过程中的有效控制。
5、由此可见,传统的固定外形不能满足高升阻比飞行器的操作要求。对于飞机而言,机翼是其升力和操纵力的主要来源,是飞机设计的首要研究对象,机翼性能的优劣直接影响飞机的飞行性能好坏。研究高升阻比飞行器变体气动设计对于提高升阻比、增强飞行器宽空域宽速域适应性、优化飞行器气动性能与飞行品质,具有重要意义。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本发明的目的在于提供一种的高升阻比飞行器变体气动控制方法,可实现实时控制飞行器气动外形变体,保正飞行器全飞行阶段保持良好的气动特性。
2、为实现上述发明目的,本发明提供一种高升阻比飞行器变体气动控制方法,包括以下步骤:
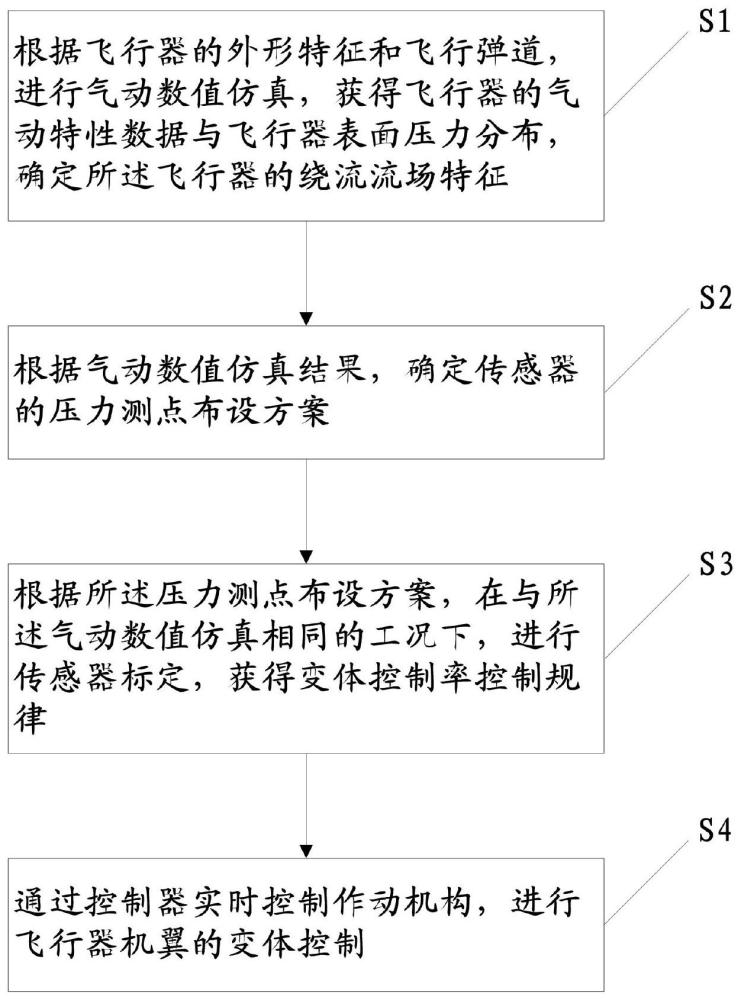
3、步骤s1、根据飞行器的外形特征和飞行弹道,进行气动数值仿真,获得所述飞行器的气动特性数据与所述飞行器表面的压力分布,确定所述飞行器的绕流流场特征;
4、步骤s2、根据气动数值仿真结果,确定传感器的压力测点布设方案;
5、步骤s3、根据所述压力测点布设方案,在与所述气动数值仿真相同的工况下,进行传感器标定,获得变体控制率控制规律;
6、步骤s4、通过控制器实时控制作动机构,进行飞行器的变体控制。
7、根据本发明的一个技术方案,在所述步骤s1中,所述气动数值仿真具体包括:
8、步骤s11、将飞行器的三维外形划分成若干子区域,对若干所述子区域分别建立六面体网格;
9、步骤s12、通过插值实现各所述子区域的解在内边界的传递;
10、步骤s13、选择数值离散方法和湍流模型,完成气动数值仿真;
11、步骤s14、根据所述气动数值仿真的结果,建立气动数据库;
12、步骤s15、根据所述气动数据库,获取所述飞行器的气动特性随所述压力测点的压力值和压力梯度值及所述飞行器的飞行速度的变化规律,获得所述飞行器的气动特性发生明显变化时所述压力测点的压力值和压力梯度值和所述飞行器的飞行速度对应的变体控制阈值,所述变体控制阈值包括高点阈值和低点阈值;所述气动特性包括所述升力、阻力和升阻比;
13、步骤s16、建立所述气动特性与所述飞行器的变体控制的映射关系。
14、根据本发明的一个技术方案,所述压力测点布置方案包括压力测点的布设位置和孔径大小的确定。
15、根据本发明的一个技术方案,所述压力测点的布设原则包括:
16、对所述飞行器的机翼的分离区域和高压区域,布置压力测点;
17、对实施变体后几何变化较大的区域,布置压力测点;
18、对于分离区域和压力梯度大的区域,进行压力测点的加密布置。
19、根据本发明的一个技术方案,在所述步骤s3中,具体包括:
20、步骤s31、选择与所述步骤s1中数值仿真相同的工况,控制所述飞行器进行变体操作,通过所述压力测点获取飞行器变体过程中的压力分布和压力变化规律;
21、步骤s32、对比所述飞行器变体过程中的压力分布和压力变化规律与所述气动数值仿真的结果,对所述气动数值仿真的结果进行标定、校正和修正;
22、步骤s33、测量所述飞行器变体后的特征几何参数,与控制器的控制预期变体外形进行对比,完成所述控制器的标定与调试。
23、根据本发明的一个技术方案,对所述飞行器的变体控制包括对所述飞行器的机翼的后掠角、安装角、弯度和前缘半径的变体控制。
24、根据本发明的一个技术方案,在所述步骤s4中,所述变体控制包括:
25、当所述压力测点的压力梯度或所述飞行器的飞行速度大于其高点阈值时,增大所述机翼的后掠角;当所述压力测点的压力梯度或所述飞行器的飞行速度小于其低点阈值时,减小所述机翼的后掠角;
26、当所述飞行器的飞行速度或实时升阻比小于其低点阈值时,增大所述机翼的安装角;当所述飞行器的飞行速度或实时升阻比大于其高点阈值时,增大所述机翼的安装角;
27、当所述压力测点的压力梯度或所述飞行器的飞行速度大于其高点阈值时,减小所述机翼的弯度和前缘半径;当所述压力测点的压力梯度或所述飞行器的飞行速度小于其低点阈值时,增大所述机翼的弯度和前缘半径。
28、本发明与现有技术相比,具有如下有益效果:
29、本发明提出了一种高升阻比飞行器变体气动控制方法,通过对飞行器进行气动数值仿真建立气动数据库,并在飞行器表面布置传感器,通过对比气动数值仿真结果和传感器的测量结果,对气动数值仿真结果和控制器进行标定、校正和修正,再根据标定后的结果以及传感器实时获取测量结果,通过控制器对飞行器机翼进行实时变体控制,确保飞行器在全飞行阶段保持有良好的气动特性。本发明,可用于实现飞行器增加升力、降低阻力及提高升阻比,增强飞行器宽空域宽速域适应性,优化飞行器气动性能与飞行品质。
技术特征:1.一种高升阻比飞行器变体气动控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的高升阻比飞行器变体气动控制方法,其特征在于,在所述步骤s1中,所述气动数值仿真具体包括:
3.根据权利要求1所述的高升阻比飞行器变体气动控制方法,其特征在于,所述压力测点布置方案包括压力测点的布设位置和孔径大小的确定。
4.根据权利要求3所述的高升阻比飞行器变体气动控制方法,其特征在于,所述压力测点的布设原则包括:
5.根据权利要求4所述的高升阻比飞行器变体气动控制方法,其特征在于,在所述步骤s3中,具体包括:
6.根据权利要求2所述的高升阻比飞行器变体气动控制方法,其特征在于,对所述飞行器的变体控制包括对所述飞行器的机翼的后掠角、安装角、弯度和前缘半径的变体控制。
7.根据权利要求6所述的高升阻比飞行器变体气动控制方法,其特征在于,在所述步骤s4中,所述变体控制包括:
技术总结本发明涉及一种高升阻比飞行器变体气动控制方法,包括以下步骤:步骤S1、根据飞行器的外形特征和飞行弹道,进行气动数值仿真,获得飞行器的气动特性数据与飞行器表面压力分布,确定所述飞行器的绕流流场特征;步骤S2、根据气动数值仿真结果,确定传感器的压力测点布设方案;步骤S3、根据所述压力测点布设方案,在与所述气动数值仿真相同的工况下,进行传感器标定,获得变体控制率控制规律;步骤S4、通过控制器实时控制作动机构,进行飞行器机翼的变体控制。本发明通过建立的气动数据库以及布置于飞行器表面的传感器,实时控制飞行器气动外形实现变体,保证飞行器全飞行阶段保持良好的气动特性。技术研发人员:杜若凡,吕凡熹,赵飞,徐艺哲,张宇佳,侯砚泽,石泳受保护的技术使用者:中国空间技术研究院技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221039.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表