一种基于蝴蝶形体结构的扑翼飞行器
- 国知局
- 2024-08-01 05:46:10
本技术涉及飞行器,尤其涉及一种基于蝴蝶形体结构的扑翼飞行器。
背景技术:
1、由于其体积小,微型无人飞行器可以进入复杂的空间执行特殊任务,在救灾、勘探、侦察等领域具有明显的优势。
2、从实际应用的角度来看,扑翼机构与传统的旋翼机构、固定翼机构等机构相比有显著灵活性、机动性和隐蔽性。并且,随着机身结构的减小,无论是旋翼还说固定翼机构产生升力的效率大大降低,从而导致无法实现较小体积的结构设计。而扑翼机构产生升力具有很强的非定常性从而具有较高的效率,扑翼模式的非定常气动机制有:weis-fogh机制、延时失速机制、尾迹捕获机制、翻转机制。自然界中昆虫扑翼是拍动和翻转两种运动的耦合,扑翼运动规律的改变对产生的升力大小有较大影响。
3、由于扑翼空气动力学尚处于研究阶段,无法指导飞行器的工程设计,难以高速化、大型化设计,对制作材料有特殊要求(质量轻、强度大),且结构复杂,尽管tod reichert研制的snowbird和festo公司的smartbird等扑翼飞行器取得了较大的成功,但是距离获得完善的扑翼机理论和高可靠性的扑翼飞行器结构还有很大距离。
4、目前对于以上两类扑翼飞行器的研究主要集中在理论分析上,且以扑翼鸟、蜻蜓和蜜蜂为主,对于蝴蝶的理论研究和结构设计都存在较大空缺,目前已知的festo公司的emotionbutterfly最为成功,但对于蝴蝶飞行机理和飞行器性能优化的研究仍不足。
技术实现思路
1、本实用新型提供了一种基于蝴蝶形体结构的扑翼飞行器,解决目前缺乏仿生蝴蝶扑翼机器人的问题。
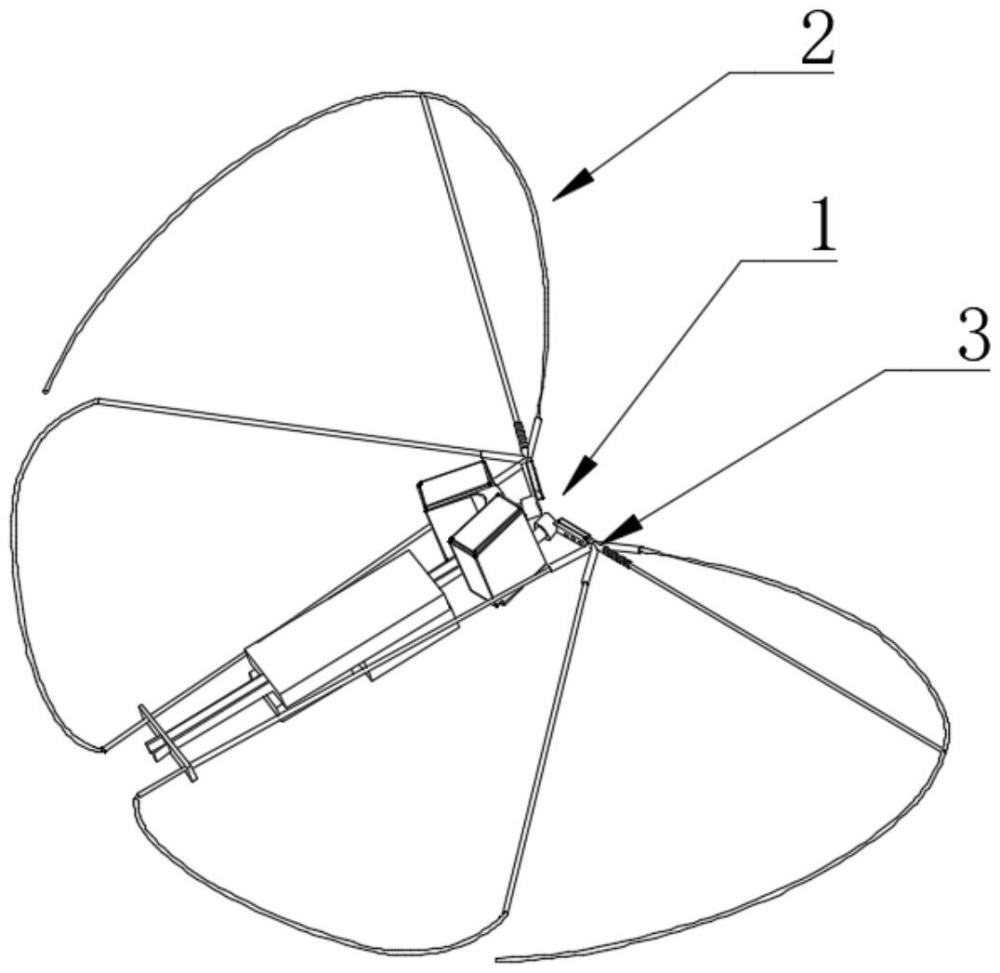
2、一种基于蝴蝶形体结构的扑翼飞行器,包括:主躯干与翅膀骨架,主躯干与翅膀骨架通过骨架连接件连接;
3、主躯干包括伺服电机、控制器、电池、接收机与连接碳片,伺服电机通过电机安装座安装在连接碳片的一端并通过承接板与骨架连接件连接,连接碳片的另一端通过后翼连接片与翅膀骨架连接,控制器、电池与接收机分别设置在连接碳片的中部;
4、翅膀骨架包括前翼杆、后翼杆与中部杆,中部杆设置在前翼杆内部,后翼杆与前翼杆为分离式结构且仅有一端相接;前翼杆所在的范围以及后翼杆所在的范围均敷设有翅膜。
5、进一步地,上述伺服电机、控制器和接收机分别与电池通电连接,接收机与控制器以及控制器与伺服电机通信连接。
6、进一步地,上述骨架连接件包括套筒与连接板,套筒与连接板为一体成型,套筒包括多根分支,翅膀骨架分别插接在多根分支上。
7、进一步地,上述中部杆插接的套筒分支设置了应力分散槽,应力分散槽呈“月牙形”且沿套筒分支外壁均匀分布。
8、进一步地,上述连接板上设有螺孔,连接板通过在螺孔中插设螺栓与承接板螺纹连接。
9、进一步地,上述电机安装座上设有可供连接碳片穿过的碳片固定孔,电机安装座上还设有可供导线穿过的通缝。
10、进一步地,上述翅膀骨架采用碳纤维制成,翅膜采用pet聚酯薄膜制成。
11、进一步地,上述翅膀骨架采用3d打印制成。
12、本实用新型具有以下有益效果:
13、(1)本实用新型的扑翼飞行器通过研究蝴蝶的外形和运动机理,采取双伺服电机直接驱动前翼做扑打动作,通过骨架连接件与后翼连接片将伺服电机输出的旋转扭矩传递至后翼,使前后翼以不同变形量产生不同步运动,实现灵活地飞行。
14、(2)本实用新型的扑翼飞行器仅靠一对前后翼翅膀上扑及下扑过程中受到的空气阻力之差产生飞行所需的升力,通过改变翅膀扑动角来改变飞行方向,通过翅膀在空气中上扑时的被动变形产生推进力,动作模式简洁、轻盈,不需要设置操纵偏航、俯仰的尾舵。
15、(3)本实用新型的扑翼飞行器最大翼展达到30cm,整机重量为20g左右,结构轻盈小巧紧凑,仿生效果明显,在自然环境飞行时具有低速高机动性的特点,且隐蔽性较高,拥有一定的军事侦察能力。
16、(4)本实用新型的扑翼飞行器仿生蝴蝶而设计,相比现有的模拟其它昆虫的仿生飞行器更美观精致,观赏性极强。
技术特征:1.一种基于蝴蝶形体结构的扑翼飞行器,其特征在于,包括:主躯干(1)与翅膀骨架(2),所述主躯干(1)与翅膀骨架(2)通过骨架连接件(3)连接;
2.根据权利要求1所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述伺服电机(10)、控制器(12)和接收机(14)分别与电池(13)通电连接,所述接收机(14)与控制器(12)以及控制器(12)与伺服电机(10)通信连接。
3.根据权利要求1所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述骨架连接件(3)包括套筒(30)与连接板(31),所述套筒(30)与连接板(31)为一体成型,所述套筒(30)包括多根分支,所述翅膀骨架(2)分别插接在多根分支上。
4.根据权利要求3所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述中部杆(22)插接的套筒(30)分支设置了应力分散槽(301),所述应力分散槽(301)呈“月牙形”且沿套筒(30)分支外壁均匀分布。
5.根据权利要求3所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述连接板(31)上设有螺孔(310),连接板(31)通过在螺孔(310)中插设螺栓与承接板(17)螺纹连接。
6.根据权利要求1所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述电机安装座(11)上设有可供所述连接碳片(15)穿过的碳片固定孔(111),所述电机安装座(11)上还设有可供导线穿过的通缝(110)。
7.根据权利要求1至6任一项所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述翅膀骨架(2)采用碳纤维制成,所述翅膜采用pet聚酯薄膜制成。
8.根据权利要求7所述的基于蝴蝶形体结构的扑翼飞行器,其特征在于:所述翅膀骨架(2)采用3d打印制成。
技术总结本技术公开了一种基于蝴蝶形体结构的扑翼飞行器,包括:主躯干与翅膀骨架,主躯干与翅膀骨架通过骨架连接件连接;主躯干包括伺服电机、控制器、电池、接收机与连接碳片,伺服电机通过电机安装座安装在连接碳片的一端并通过承接板与骨架连接件连接,连接碳片的另一端通过后翼连接片与翅膀骨架连;翅膀骨架包括前翼杆、后翼杆与中部杆,前翼杆所在的范围以及后翼杆所在的范围均敷设有翅膜。本技术的扑翼飞行器仅靠一对前后翼翅膀上扑及下扑过程中受到的空气阻力之差产生飞行所需的升力,通过改变翅膀扑动角来改变飞行方向,通过翅膀在空气中上扑时的被动变形产生推进力,动作模式简洁轻盈,不需要设置操纵偏航、俯仰的尾舵。技术研发人员:罗枭贤,李金峡,张浩川,夏慧,伍剑波,苗丕渝,陈益辉受保护的技术使用者:四川大学技术研发日:20231027技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/221335.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表