一种具备攀爬和飞行功能的复合飞行器及控制方法
- 国知局
- 2024-08-01 05:48:21
本技术涉及飞行器,尤其涉及一种具备攀爬和飞行功能的复合飞行器及控制方法。
背景技术:
1、在科技与市场的推动下,越来越多不同种类的飞行器出现在人们的视野中。目前,常规飞行器在航拍、探测、农业、物流等领域得到了广泛的应用,但是其缺点在于只能在空旷环境中飞行,对于室内或一些狭窄空间受限环境,常规飞行器往往难以操控,无法完成一些高精度的探测任务,甚至存在碰壁、坠机等风险,如何提高飞行器的环境适应能力成为了当下学术界的热点话题。
2、与此同时,我国桥梁公路总长度已达5.2万公里,隧道总长度也超过了4.2万公里,在城市中更是拥有近千座超过两百米高度的大楼。放眼国内外,针对桥梁隧道检测、高楼外壁清洗等工作,往往只能依靠蜘蛛人或者一些低效的工具进行空中作业,鲜有能用于此类高危作业场景的飞行器,难以保障工作人员的人身安全。
3、为提高空中作业效率、保障工作人员安全,以及改善飞行器环境适应能力不足的问题,兼具攀爬和飞行功能的复合飞行器逐渐成为当下的研究热点。
4、现有的攀爬装置主要采用以下几种结构:
5、1.多足仿生吸附结构;
6、2.车式磁铁吸附结构;
7、3.抽真空吸附式结构;
8、4.多螺旋桨助推式结构。
9、调研表明,采用多足仿生吸附结构和抽真空吸附式结构的爬墙装置欠缺灵活性,运动缓慢,并且对墙面光滑平整程度要求高,而车式磁铁吸附结构对墙面材料要求高,只能吸附磁性材料,不具有普遍应用价值。
10、目前具备攀爬功能的复合飞行器多数采用多螺旋桨助推式结构,在墙面爬行时竖直贴附在墙面上,依靠旋翼提供的推力施加对墙面的压力为复合飞行器在墙面栖停和爬行提供摩擦力。这种方式需要旋翼提供较大的推力才能满足飞行器与墙面之间摩擦力的需求,功耗较大,飞行器的续航时间受到了严重的限制。此外,该类复合飞行器通常只能在墙面爬行,而不能在隧道顶部、桥梁底部,或者建筑内部的天花板等爬行,应用范围有所缩减。
技术实现思路
1、本技术解决的技术问题是如何提高飞行器在墙面、建筑顶部的攀爬能力,为解决这一技术问题,本技术提供一种具备攀爬和飞行功能的复合飞行器及控制方法。
2、根据本技术的第一方面,本技术提供一种具备攀爬和飞行功能的复合飞行器,包括:
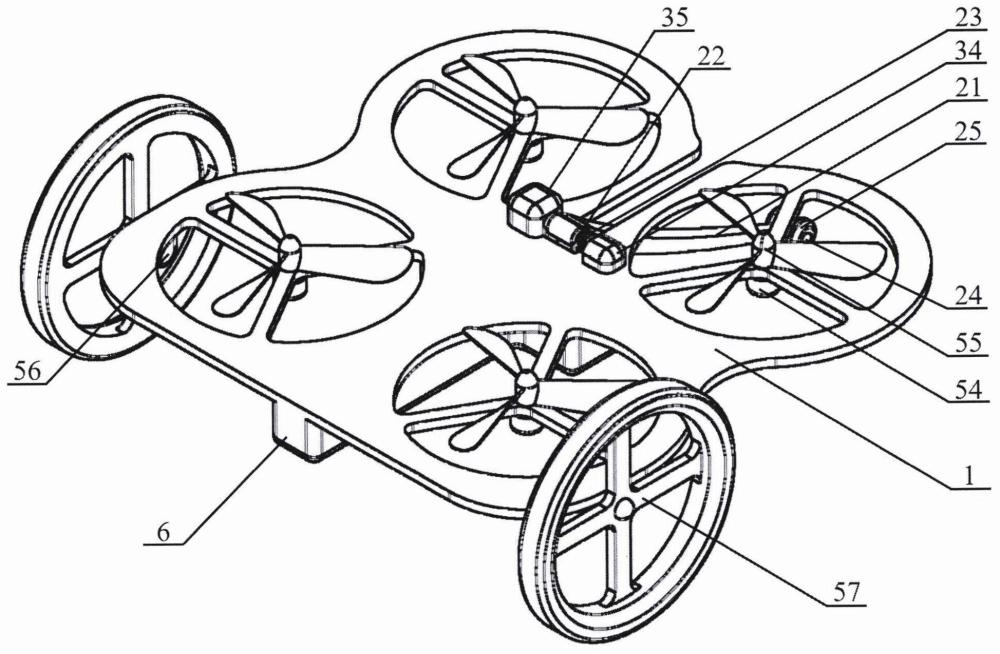
3、机身,作为所述复合飞行器的主要承力结构,用于承载多个硬件单元,所述多个硬件单元包括控制单元、飞控单元和动力单元;所述控制单元包括飞控助手模块和支撑模块,所述飞控助手模块用于配置所述复合飞行器的控制模式,并根据所述控制模式控制所述支撑模块调整所述机身的角度,使得所述复合飞行器在所述控制模式下执行攀附动作;所述飞控单元包括飞控核心模块,所述飞控核心模块用于感知所述复合飞行器的姿态并产生姿态信息;所述动力单元包括转轮模块和旋翼模块,所述转轮模块用于驱动所述机身行走,所述旋翼模块用于驱动所述机身悬停或飞行;其中,所述飞控助手模块还用于从所述飞控核心模块获取所述姿态信息,以及根据所述姿态信息和所述控制模式控制所述转轮模块驱动所述机身行走,使得所述复合飞行器在所述控制模式下执行爬行动作;其中,所述飞控核心模块还用于根据所述姿态信息和所述控制模式控制所述旋翼模块驱动所述机身悬停或飞行,使得所述复合飞行器在所述控制模式下执行飞行动作。
4、进一步的,所述控制单元还包括遥控器接收机模块;所述遥控器接收机模块用于通过无线电获取一遥控器的遥控信号并转化为遥控信息;所述飞控助手模块用于通过sbus协议通信获取所述遥控信息,从所述遥控信息中解析出所述控制模式并对所述复合飞行器进行配置。
5、进一步的,所述支撑模块包括伸缩电机、舵机和摇臂;所述机身的后侧沿中轴设置有长方形的空隙收纳仓;所述舵机安装在所述空隙收纳仓的一侧,所述舵机的输出轴与置于所述空隙收纳仓内所述摇臂连接,且末端设有旋转齿轮,所述摇臂的末端设有支撑轮以用于在支撑面上滑动;所述舵机用于驱使所述摇臂转动,在所述摇臂相对支撑面被支起时调整所述机身的角度,使得所述复合飞行器执行攀附动作;所述伸缩电机安装在所述空隙收纳仓的另一侧,所述伸缩电机的输出轴末端设有伸缩齿轮,所述伸缩电机用于驱使所述伸缩齿轮向所述旋转齿轮移动,在所述伸缩齿轮和所述旋转齿轮之间卡合时锁定所述摇臂的转动角度。
6、进一步的,所述飞控助手模块与所述舵机和所述伸缩电机分别信号连接,用于根据所述控制模式输出一路pwm控制信号至所述伸缩电机,输出另一路pwm控制信号至所述舵机。
7、进一步的,所述转轮模块包括两个驱动电机和两个转轮;两个所述驱动电机设于所述机身的相对两侧,且两个所述驱动电机的输出轴与两个所述转轮分别对应连接;所述飞控助手模块与所述飞控核心模块信号连接,用于通过mavlink协议通信从所述飞控核心模块获取所述姿态信息,根据所述姿态信息和所述控制模式产生pwm/can信号;所述飞控助手模块与两个所述驱动电机分别信号连接,所述pwm/can信号被传输至两个所述驱动电机,被用于控制两个所述驱动电机给对应的所述转轮提供转动力,使得所述复合飞行器执行爬行动作。
8、进一步的,所述旋翼模块包括四个无刷电机和四个旋翼,所述机身具有田字形结构设置的四个装配区域,四个所述装配区域中均设有支撑架,四个所述无刷电机分别固定于四个所述装配区域的支撑架上,四个所述无刷电机的输出轴与四个所述旋翼一一对应连接;所述动力单元还包括电池、电流计模块和电调模块;所述电流计模块用于将所述电池的电流分配给两个所述驱动电机和所述电调模块,以及将监测所述电池的工作电压并反馈给所述飞控核心模块;所述飞控助手模块用于根据所述姿态信息和所述控制模式解算出所述复合飞行器调整自身姿态所需的pwm控制信号,并编码为ppm信号后反馈至所述飞控核心模块;所述飞控核心模块与所述电调模块信号连接,用于根据所述ppm信号产生向所述电调模块发出的pwm信号,通过改变所述电调模块输分别输送至四个所述无刷电机的电流以调整对应所述旋翼的转速,使得所述复合飞行器执行飞行动作。
9、进一步的,所述飞控单元还包括gps模块,所述gps模块与所述飞控核心模块信号连接,用于获取所述复合飞行器的空间定位信息并发送至所述飞控核心模块。
10、进一步的,所述飞控助手模块能够将所述复合飞行器的控制模式配置为桥接模式、攀爬模式或飞檐模式;在所述桥接模式下,所述飞控助手模块使能所述支撑模块,使得所述支撑模块、所述转轮模块在支撑面上配合形成多点支撑结构,所形成的多点支撑结构能够支撑所述复合飞行器在支撑面上平稳地起飞和降落;在所述攀爬模式下,所述飞控助手模块使能所述支撑模块调整所述机身达到第一预设角度,所述飞控核心模块控制所述旋翼模块提供推力,并在所述支撑模块、所述转轮模块提供摩擦力的共同作用下使所述机身倾斜贴附于支撑面,所述飞控助手模块还控制所述转轮模块使所述机身沿支撑面行走;在所述飞檐模式下,所述飞控助手模块使能所述支撑模块调整所述机身达到第二预设角度,所述飞控核心模块控制所述旋翼模块提供推力以使所述机身平行贴附于支撑面,并由所述支撑模块、所述转轮模块在支撑面上形成保持所述机身平行的多个支撑点,所述飞控助手模块还控制所述转轮模块使所述机身沿支撑面行走。
11、根据第二方面,一种实施例提供一种用于复合飞行器的控制方法,所述复合飞行器为第一方面中所述的复合飞行器,且所述复合飞行器包括机身、控制单元、飞控单元和动力单元,所述控制方法包括:
12、所述控制单元获取为所述复合飞行器新配置的控制模式,判断新配置的控制模式相比原配置的控制模式是否发生变化,若发生变化则控制调整所述机身的角度;在新配置的控制模式下,所述控制单元获从所述飞控单元获取所述复合飞行器的姿态信息,并结合新配置的控制模式产生控制所述复合飞行器执行爬行动作的控制信号,以及执行飞行动作的初始信号;其中,执行爬行动作的控制信号被所述控制单元作用于所述动力单元,以使所述动力单元调整所述复合飞行器爬行时的姿态和/或位置;其中,执行飞行动作的初始信号被传输至所述飞控单元,由所述飞控单元产生作用于所述动力单元的控制信号, 以使所述动力单元调整所述复合飞行器飞行时的姿态和/或位置;。
13、进一步的,在新配置的控制模式下,所述控制单元还将与遥控器的遥控信号传输通道切换为驱动和飞行控制的专用信号通道,以便所述遥控器对所述复合飞行器进行爬行和飞行的远距操控。
14、本技术的有益效果是:
15、依上述实施例的具备攀爬和飞行功能的复合飞行器及控制方法,其中的复合飞行器包括机身、控制单元、飞控单元和动力单元。由于控制单元中支撑模块的支撑作用,使得机身与支撑面(如墙面、顶面)之间存在固定夹角,旋翼模块的斜向推力分解后能降低复合飞行器稳定所需摩擦力并且提供摩擦力所需压力,相较于机身垂直贴附支撑面所需旋翼推力更小,从而能降低复合飞行器功耗、延长作业时间。同时,通过调整支撑模块的角度,复合飞行器能实现在不同角度的平面攀爬,相较于普通复合飞行器扩展了应用范围,具备更强的环境适应能力。
16、此外,本技术在控制单元通过飞控助手模块可直接对遥控器接收机模块的信号进行接管和控制,无需对飞控核心模块的程序进行修改即可对复合飞行器的控制模式和姿态进行调控,降低了设计的复杂程度,有较好的兼容性,便于复合飞行器的调试和应用开发。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221509.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表