一种地空两栖侦查系统的制作方法
- 国知局
- 2024-08-01 05:48:24
本发明属于无人机及侦查,特别涉及一种地空两栖侦查系统。
背景技术:
1、近些年来,无人机依托其高灵活性、良好的环境适应性、作战能力强、成本低质量高等特点,广泛的应用在民用、军事等领域。
2、现如今,无人机执行侦查任务时,需要在飞行到一定的高度,保持良好的链路通讯,鉴于拍摄云台自身的变倍及清晰度的局限性,难于侦查远距离目标及地面隐蔽部位,例如密林、密丛、山区等;另外,无人机续航时间较短,难于长时间对大范围目标侦查及搜索;现有的一体陆空两栖虽然能够执行空中及地面侦查任务,但是其携带的地面行走工具例如驱动轮等部分会增大空中飞行的重量,缩短影响续航时间,另外地面侦查时,周围环境障碍物的遮挡会影响通讯的畅通性,进而导致系统的不稳定性。
技术实现思路
1、针对上述问题,本发明提供了一种地空两栖侦查系统,包括无人机、多光云台相机、抛投回收夹具和强越野无人小车,所述抛投回收夹具和多光云台相机安装在无人机上,所述强越野无人小车通过抛投回收夹具安装在无人机上。
2、所述抛投回收夹具包括上碳纤板,所述上碳纤板的底部安装有多组安装柱,多组所述安装柱远离上碳纤板的一端安装有下碳纤板,所述上碳纤板的顶部安装有多组挂载机构,所述下碳纤板的两侧均安装有安装块,其中两组所述安装块上铰接有左夹爪,另外两组所述安装块上铰接有右夹爪,所述下碳纤板上安装有舵机支架,所述舵机支架上安装有舵机,所述舵机的输出端上安装有曲柄,所述曲柄的两端分别铰接有右连杆和左连杆,所述右连杆远离曲柄的一端铰接在右夹爪上,所述左连杆远离曲柄的一端铰接在左夹爪上。
3、进一步的,所述下碳纤板的一端安装有前限位块,所述下碳纤板的另一端安装有两组限位块,两组所述限位块以下碳纤板的中线为中心对称设置,且两组所述限位块之间安装有上翻转块。
4、进一步的,所述上翻转块的一端安装有压缩弹簧,所述压缩弹簧远离上翻转块的一端安装在下碳纤板上,所述上翻转块的另一端铰接有下翻转块,且所述上翻转块和下翻转块之间设置有扭簧。
5、进一步的,所述强越野无人小车包括车身总成、悬架总成、四组转向轮总成和两组中间驱动轮总成,所述悬架总成安装在车身总成上,四组所述转向轮总成和两组中间驱动轮总成均安装在车身总成上。
6、进一步的,所述车身总成包含车身上盖和下车身,所述车身上盖安装在下车身上,所述下车身内安装有电池、第一控制模块、第二控制模块和数据链模块,所述车身上盖上安装有抓取块,所述抓取块上安装有gps天线。
7、进一步的,所述车身上盖的两端分别安装有三轴单光相机和后视模块,所述车身上盖靠近三轴单光相机的一端安装有三组前照灯,所述车身上盖靠近后视模块的一端安装有充电座和开关。
8、进一步的,所述悬架总成包括两组中间连杆,两组所述中间连杆的一端军安装有中间转轴,所述中间转轴远离中间连杆的一端安装有后连杆,所述中间转轴上安装有中间轴承,所述中间轴承上安装有中轴承座,两组所述中间连杆的另一端均安装有前转轴,所述前转轴上安装有第一前连杆和第二前连杆。
9、进一步的,所述悬架总成还包括悬架杆,所述悬架杆上安装有法兰轴,所述悬架杆的两端分别安装有双头螺柱,两组所述双头螺柱上均安装有鱼眼轴承,两组所述鱼眼轴承分别安装在两组中间连杆上。
10、进一步的,所述转向轮总成包括转向轮架,所述转向轮架的底部安装有电机罩,所述电机罩内安装有第一减速电机,所述第一减速电机的输出端上安装有第一驱动轮,所述转向轮架内安装有第一电机电调,所述转向轮架的顶部安装有轴向轴承座,所述轴向轴承座远离转向轮架的一端安装有舵机罩,所述舵机罩内安装有转向舵机,所述轴向轴承座与转向轮架和舵机罩的连接处均设置有轴承。
11、进一步的,所述中间驱动轮总成包括驱动轮架,所述驱动轮架上安装有第二减速电机,所述第二减速电机的输出端上安装有第二驱动轮,所述第二减速电机上安装有中间电机罩,所述驱动轮架内安装有第二电机电调。
12、本发明的有益效果是:
13、1、本发明公开的一种地空两栖侦查系统,无人机协同无人车执行任务,无人机在高空执行大范围搜索目标的同时,抛投到地面上的强越野无人车也能侦查地面上隐蔽的目标,并且能够回收无人车,大大地提升了系统的侦查能力和续航能力。
14、2.本发明公开的一种地空两栖侦查系统,无人机抛投无人车后在空中飞行,作为小车通讯的中继站,能够使地面上的无人车保持良好的通讯,避免地面上障碍物引起的通讯障碍问题,维持系统的稳定性。
15、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
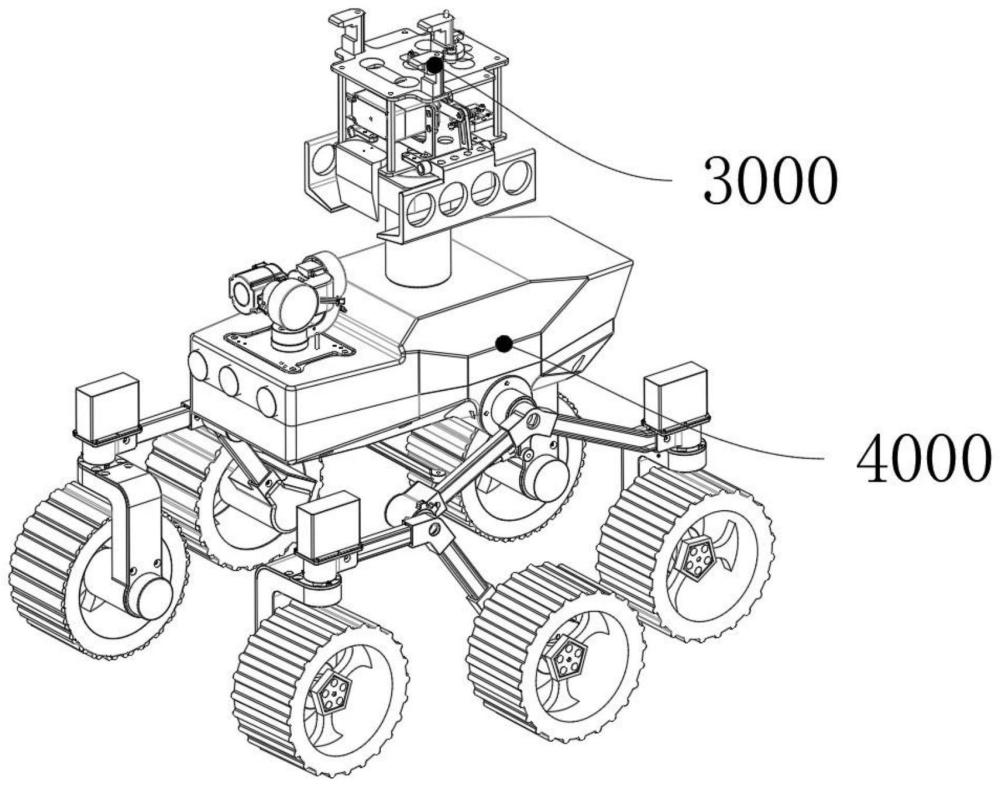
技术特征:1.一种地空两栖侦查系统,其特征在于:包括无人机(1000)、多光云台相机(2000)、抛投回收夹具(3000)和强越野无人小车(4000),所述抛投回收夹具(3000)和多光云台相机(2000)安装在无人机(1000)上,所述强越野无人小车(4000)通过抛投回收夹具(3000)安装在无人机(1000)上;
2.根据权利要求1所述的一种地空两栖侦查系统,其特征在于:所述下碳纤板(3211)的一端安装有前限位块(3217),所述下碳纤板(3211)的另一端安装有两组限位块(3206),两组所述限位块(3206)以下碳纤板(3211)的中线为中心对称设置,且两组所述限位块(3206)之间安装有上翻转块(3207)。
3.根据权利要求2所述的一种地空两栖侦查系统,其特征在于:所述上翻转块(3207)的一端安装有压缩弹簧(3210),所述压缩弹簧(3210)远离上翻转块(3207)的一端安装在下碳纤板(3211)上,所述上翻转块(3207)的另一端铰接有下翻转块(3209),且所述上翻转块(3207)和下翻转块(3209)之间设置有扭簧(3208)。
4.根据权利要求3所述的一种地空两栖侦查系统,其特征在于:所述强越野无人小车(4000)包括车身总成(4100)、悬架总成(4200)、四组转向轮总成(4300)和两组中间驱动轮总成(4400),所述悬架总成(4200)安装在车身总成(4100)上,四组所述转向轮总成(4300)和两组中间驱动轮总成(4400)均安装在车身总成(4100)上。
5.根据权利要求4所述的一种地空两栖侦查系统,其特征在于:所述车身总成(4100)包含车身上盖(4103)和下车身(4108),所述车身上盖(4103)安装在下车身(4108)上,所述下车身(4108)内安装有电池(4105)、第一控制模块(4106)、第二控制模块(4107)和数据链模块(4109),所述车身上盖(4103)上安装有抓取块(4102),所述抓取块(4102)上安装有gps天线(4101)。
6.根据权利要求5所述的一种地空两栖侦查系统,其特征在于:所述车身上盖(4103)的两端分别安装有三轴单光相机(4111)和后视模块(4104),所述车身上盖(4103)靠近三轴单光相机(4111)的一端安装有三组前照灯(4110),所述车身上盖(4103)靠近后视模块(4104)的一端安装有充电座(4112)和开关(4113)。
7.根据权利要求6所述的一种地空两栖侦查系统,其特征在于:所述悬架总成(4200)包括两组中间连杆(4205),两组所述中间连杆(4205)的一端均安装有中间转轴(4204),所述中间转轴(4204)远离中间连杆(4205)的一端安装有后连杆(4203),所述中间转轴(4204)上安装有中间轴承(4202),所述中间轴承(4202)上安装有中轴承座(4201),两组所述中间连杆(4205)的另一端均安装有前转轴(4207),所述前转轴(4207)上安装有第一前连杆(4206)和第二前连杆(4208)。
8.根据权利要求7所述的一种地空两栖侦查系统,其特征在于:所述悬架总成(4200)还包括悬架杆(4212),所述悬架杆(4212)上安装有法兰轴(4211),所述悬架杆(4212)的两端分别安装有双头螺柱(4210),两组所述双头螺柱(4210)上均安装有鱼眼轴承(4209),两组所述鱼眼轴承(4209)分别安装在两组中间连杆(4205)上。
9.根据权利要求8所述的一种地空两栖侦查系统,其特征在于:所述转向轮总成(4300)包括转向轮架(4308),所述转向轮架(4308)的底部安装有电机罩(4306),所述电机罩(4306)内安装有第一减速电机(4305),所述第一减速电机(4305)的输出端上安装有第一驱动轮(4304),所述转向轮架(4308)内安装有第一电机电调(4307),所述转向轮架(4308)的顶部安装有轴向轴承座(4303),所述轴向轴承座(4303)远离转向轮架(4308)的一端安装有舵机罩(4302),所述舵机罩(4302)内安装有转向舵机(4301),所述轴向轴承座(4303)与转向轮架(4308)和舵机罩(4302)的连接处均设置有轴承(4309)。
10.根据权利要求9所述的一种地空两栖侦查系统,其特征在于:所述中间驱动轮总成(4400)包括驱动轮架(4402),所述驱动轮架(4402)上安装有第二减速电机(4405),所述第二减速电机(4405)的输出端上安装有第二驱动轮(4401),所述第二减速电机(4405)上安装有中间电机罩(4403),所述驱动轮架(4402)内安装有第二电机电调(4404)。
技术总结本发明公开了一种地空两栖侦查系统,包括无人机、多光云台相机、抛投回收夹具和强越野无人小车,所述抛投回收夹具和多光云台相机安装在无人机上,所述强越野无人小车通过抛投回收夹具安装在无人机上;所述抛投回收夹具包括可以合并或者打开的右夹爪和左夹爪,能够夹紧和释放强越野无人小车。本发明公开的一种地空两栖侦查系统,无人机协同无人车执行任务,无人机在高空执行大范围搜索目标的同时,抛投到地面上的强越野无人车也能侦查地面上隐蔽的目标,并且能够回收无人车,大大地提升了系统的侦查能力和续航能力。技术研发人员:陈梧,丁红亮受保护的技术使用者:深圳市科卫泰实业发展有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240722/221511.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表