一种牵引车行走控制系统的制作方法
- 国知局
- 2024-08-01 05:51:18
本技术属于牵引车的行走,具体涉及一种牵引车行走控制系统。
背景技术:
1、无杆牵引车作为未来机场牵引保障设备的主要发展方向,受到越来越多的人的重视。除了外观结构和有杆牵引车有明显区别外,整体控制方式也大大不同,为了适应无杆牵引车未来的发展,现需实用新型一种无杆牵引车行走控制方法,用以完成行走、转弯、制动、急停、加速、遇障控制功能。
技术实现思路
1、本实用新型的目的是为解决上述问题,本申请提出一种牵引车行走控制系统,用于完成行走、转弯、制动、急停、加速、遇障控制。
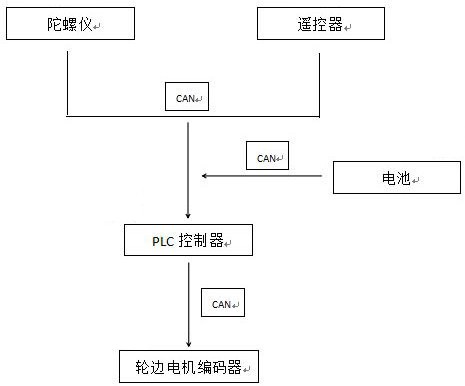
2、为实现上述目的,本实用新型提供以下技术方案:一种牵引车行走控制系统,包括驱动控制系统、雷达、电池,所述驱动控制系统包括遥控器、plc控制器、轮边电机编码器、陀螺仪,所述陀螺仪、遥控器和plc控制器之间,电池和plc控制器之间,plc控制器和轮边电机编码器之间均是通过can总线连接,所述雷达放置在牵引车的四个方位,所述陀螺仪放置在牵引车的中心位置。
3、进一步的:所述plc控制器是上层控制器,接收陀螺仪和遥控器的指令信息。
4、进一步的:所述轮边电机编码器是底层控制器,通过can总线接收plc控制器的指令。
5、进一步的:所述雷达通过can总线与plc控制器连接,并将指令传输至plc控制器的输入端。
6、进一步的:所述电池是牵引车行走控制系统的动力总成。
7、进一步的:所述遥控器包括手持遥控器和牵引车车身上的遥控界面。
8、与现有技术相比,本实用新型的有益效果在于:
9、本系统利用差速控制来完成牵引车的行走与转弯功能,并利用布置在车身的陀螺仪,实现速度闭环控制流程。
10、利用遥控器实现牵引车的行走、转弯、制动急停;通过雷达检测四个方向一定范围内的障碍物,并通过can总线通道将指令传递给plc控制器,实现牵引车的制动或急停。
技术特征:1.一种牵引车行走控制系统,包括驱动控制系统、雷达和电池,其特征在于:所述驱动控制系统包括遥控器、plc控制器、轮边电机编码器、陀螺仪,所述陀螺仪、遥控器和plc控制器之间,电池和plc控制器之间,plc控制器和轮边电机编码器之间均是通过can总线连接,所述雷达通过can总线与plc控制器连接,并将指令传输至plc控制器的输入端。
2.根据权利要求1所述的一种牵引车行走控制系统,其特征在于:所述plc控制器是上层控制器,接受陀螺仪和遥控器的指令信息。
3.根据权利要求1所述的一种牵引车行走控制系统,其特征在于:所述轮边电机编码器是底层控制器,通过can总线接收来自上层plc控制器的指令。
4.根据权利要求1所述的一种牵引车行走控制系统,其特征在于:所述雷达放置在牵引车的四个方位,所述陀螺仪放置在牵引车的中心位置。
5.根据权利要求1所述的一种牵引车行走控制系统,其特征在于:所述电池是牵引车行走控制系统的动力总成。
6.根据权利要求1所述的一种牵引车行走控制系统,其特征在于:所述遥控器包括手持遥控器和牵引车车身上的遥控界面。
技术总结本技术涉及一种牵引车行走控制系统,包括驱动控制系统、雷达和电池,所述驱动控制系统包括遥控器、PLC控制器、轮边电机编码器、陀螺仪,所述陀螺仪、遥控器和PLC控制器之间,电池和PLC控制器之间,PLC控制器和轮边电机编码器之间均是通过CAN总线连接,所述雷达放置在牵引车的四个方位,所述陀螺仪放置在牵引车的中心位置。本系统利用遥控器实现牵引车的行走、转弯、制动急停;通过雷达检测四个方向一定范围内的障碍物,实现牵引车的制动或急停;本系统利用差速控制来完成牵引车的行走与转弯功能,并利用布置在车身的陀螺仪,实现速度闭环控制流程。技术研发人员:高东,冯骥驰,肖昕翔,韦天华,贾永乐受保护的技术使用者:西安睿诺航空装备有限公司技术研发日:20230619技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/221733.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表