一种无人机挂载用快拆结构的制作方法
- 国知局
- 2024-08-01 05:52:12
本技术涉及无人机,具体为一种无人机挂载用快拆结构。
背景技术:
1、无人机是一种新型低空飞行装置,可达到通过连接不同外接组件实现多种效果的作用,可以通过远程控制装置达到便于使用者控制使用的效果,在无人机进行挂载的过程中需要使用连接杆和连接板外接挂载组件进行挂载输送,但是连接杆需要通过螺纹组件以及螺纹垫板和连接块进行连接,且连接块同样是通过若干个螺纹卡接件与连接板进行连接,从而就导致了在组装的过程中会耗费使用者大量的时间在紧固螺纹组件的过程中。
2、公开号为cn219506228u的专利公开了一种无人机挂载快速拆装结构,包括无人机、两个连接杆和连接板,两个连接杆分别位于无人机底部的左右两侧,连接杆表面的前侧和后侧均设置有压合机构。通过设置无人机、连接杆、连接板、压合机构、放置槽、定位机构和传动机构的配合使用,解决了现有连接杆需要通过螺纹组件以及螺纹垫板和连接块进行连接,且连接块同样是通过若干个螺纹卡接件与连接板进行连接,从而就导致了在组装的过程中会耗费使用者大量的时间在紧固螺纹组件的过程中,且使用无人机挂载不同物件时,所需要使用的连接板同样存在着差异,就存在着需要对连接板进行拆除更换的效果,而无法达到快速拆装的效果会影响使用者便捷的使用的问题。
3、上述现有技术在具体使用过程中,采用四个压合机构将连接杆和连接板进行连接,而连接板是通过四个定位机构分别与四个压合机构连接的,压合机构与定位机构对接时,需要使用传动机构驱动定位机构中的两个定位杆相对移动才行,这样就导致四个压合机构与四个定位机构对接时需要同时按压四个传动机构中的传动杆,也就是说至少需要两名工作人员同时按压四个传动杆,甚至还需要一名工作人员拿着无人机,以便于控制四个压合机构与四个定位结构对接,造成该无人机挂载结构在拆装时需要两至三名工作人员才能完成,单名工作人员无法实现该无人机挂载的拆装,具有很大的使用限制,鉴于此,我们提出一种无人机挂载用快拆结构。
技术实现思路
1、本实用新型的目的在于提供一种无人机挂载用快拆结构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
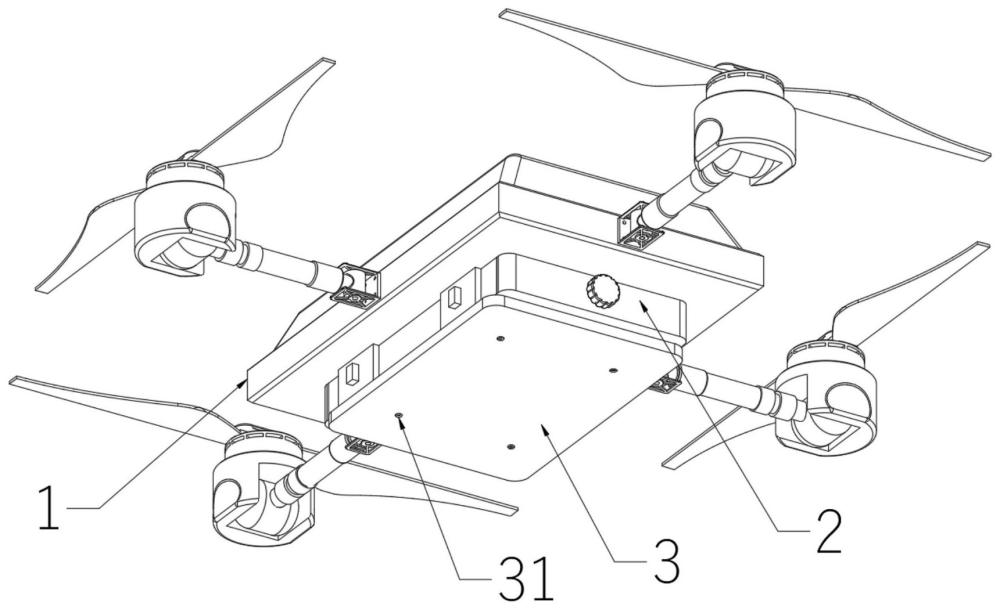
3、一种无人机挂载用快拆结构,包括无人机,所述无人机的底部设有挂载组件,所述挂载组件包括固定连接于无人机底部的框形固定座,所述框形固定座内壁左右两侧之间且位于中部的位置转动连接有双向丝杆,所述双向丝杆的两个螺纹区均螺纹连接有u形定位板,两个所述u形定位板呈左右对称设置,所述框形固定座内壁的左右两侧且靠近前后两端的位置均开设有供u形定位板端部穿过的矩形孔a,所述双向丝杆的外壁且靠近中部的位置设有从动锥齿轮,所述框形固定座内壁前侧的中部转动连接有转动轴,所述转动轴的后端同轴连接有与从动锥齿轮啮合传动的主动锥齿轮,所述框形固定座的底部可拆卸连接有用于安装挂载设备的挂载安装座,所述挂载安装座顶部的左右两侧且靠近前后两端的位置均设有矩形限位块,所述矩形限位块侧面的中部开设有矩形孔b,所述u形定位板的端部依次从矩形孔a和矩形孔b穿过;
4、通过转动轴带动主动锥齿轮转动,主动锥齿轮带动从动锥齿轮转动,从而使从动锥齿轮带动双向丝杆转动,使双向丝杆驱动两个u形定位板同步移动,当两个u形定位板反向同步移动时,左方的u形定位板的两个端部分别从左方的两个矩形孔a穿过,左方的u形定位板可以将左方的两个矩形限位块定位在框形固定座的左侧,右方的u形定位板的两个端部分别从右方的两个矩形孔a穿过,右方的u形定位板可以将右方的两个矩形限位块定位在框形固定座的右侧,从而实现挂载安装座与框形固定座的安装,该连接方式可以让使用者快速完成挂载安装座的拆装,挂载安装座的底部用于安装挂载设备,可以在经常使用的挂载设备上均安装一个挂载安装座,在更换挂载设备时,只需要将挂载安装座从挂载组件上拆卸即可,可以让使用者快速更换不同的挂载设备。
5、优选的,所述转动轴通过轴承与框形固定座连接,所述转动轴的前端穿过框形固定座内壁的前侧且固定连接有旋钮,便于使用者驱动转动轴转动。
6、优选的,所述框形固定座内壁的前侧且靠近中部的位置设有l形固定板,所述转动轴的后端从l形固定板的内侧穿过,l形固定板与转动轴的连接处靠近转动轴的后端,对转动轴起到辅助定位的作用,确保转动轴在使用过程中稳定转动。
7、优选的,所述框形固定座内壁左右两侧之间且靠近顶部的位置设有第一定位杆和第二定位杆,所述第一定位杆和第二定位杆呈前后对称设置,所述第一定位杆位于第二定位杆的正后方,对两个u形定位板的移动起到辅助定位的作用。
8、优选的,所述u形定位板的顶部且靠近后端的位置设有第一限位块,所述第一限位块滑动连接于第一定位杆的外侧,所述u形定位板的顶部且靠近前端的位置设有第二限位块,所述第二限位块滑动连接于第二定位杆的外侧,使u形定位板被双向丝杆稳定驱动,使u形定位板只能左右平移。
9、优选的,所述框形固定座的左右两侧且靠近前后两端的位置均开设有u形限位槽,四个所述矩形限位块分别位于四个u形限位槽内,使四个矩形限位块的位置初步定位,有利于四个矩形孔b分别与四个矩形孔a连通,两个u形定位板将四个矩形限位块定位后,可以使四个矩形限位块稳定固定在框形固定座的侧面。
10、优选的,所述挂载安装座的底部开设有多个供挂载设备安装用的螺纹安装槽,挂载设备通过螺栓固定在挂载安装座的底部,在更换挂载设备时连同挂载安装座一同更换,一个挂载安装座对应一种挂载设备,从而提高挂载设备的拆装效率。
11、与现有技术相比,本实用新型的有益效果是:
12、1、该无人机挂载用快拆结构,通过转动轴带动主动锥齿轮转动,主动锥齿轮带动从动锥齿轮转动,从而使从动锥齿轮带动双向丝杆转动,使双向丝杆驱动两个u形定位板同步移动,当两个u形定位板反向同步移动时,左方的u形定位板可以将左方的两个矩形限位块定位在框形固定座的左侧,右方的u形定位板可以将右方的两个矩形限位块定位在框形固定座的右侧,从而实现挂载安装座与框形固定座的安装,该连接方式可以让使用者快速完成挂载安装座的拆装。
13、2、该无人机挂载用快拆结构,挂载安装座的底部用于安装挂载设备,挂载设备通过螺栓固定在挂载安装座的底部,在更换挂载设备时连同挂载安装座一同更换,一个挂载安装座对应一种挂载设备,从而提高挂载设备的拆装效率。
技术特征:1.一种无人机挂载用快拆结构,包括无人机(1),其特征在于:所述无人机(1)的底部设有挂载组件(2),所述挂载组件(2)包括固定连接于无人机(1)底部的框形固定座(20),所述框形固定座(20)内壁左右两侧之间且位于中部的位置转动连接有双向丝杆(21),所述双向丝杆(21)的两个螺纹区均螺纹连接有u形定位板(22),两个所述u形定位板(22)呈左右对称设置,所述框形固定座(20)内壁的左右两侧且靠近前后两端的位置均开设有供u形定位板(22)端部穿过的矩形孔a(201),所述双向丝杆(21)的外壁且靠近中部的位置设有从动锥齿轮(23),所述框形固定座(20)内壁前侧的中部转动连接有转动轴(24),所述转动轴(24)的后端同轴连接有与从动锥齿轮(23)啮合传动的主动锥齿轮(25),所述框形固定座(20)的底部可拆卸连接有用于安装挂载设备的挂载安装座(3),所述挂载安装座(3)顶部的左右两侧且靠近前后两端的位置均设有矩形限位块(30),所述矩形限位块(30)侧面的中部开设有矩形孔b(300),所述u形定位板(22)的端部依次从矩形孔a(201)和矩形孔b(300)穿过。
2.根据权利要求1所述的无人机挂载用快拆结构,其特征在于:所述转动轴(24)通过轴承与框形固定座(20)连接,所述转动轴(24)的前端穿过框形固定座(20)内壁的前侧且固定连接有旋钮(26)。
3.根据权利要求1所述的无人机挂载用快拆结构,其特征在于:所述框形固定座(20)内壁的前侧且靠近中部的位置设有l形固定板(29),所述转动轴(24)的后端从l形固定板(29)的内侧穿过。
4.根据权利要求1所述的无人机挂载用快拆结构,其特征在于:所述框形固定座(20)内壁左右两侧之间且靠近顶部的位置设有第一定位杆(27)和第二定位杆(28),所述第一定位杆(27)和第二定位杆(28)呈前后对称设置,所述第一定位杆(27)位于第二定位杆(28)的正后方。
5.根据权利要求4所述的无人机挂载用快拆结构,其特征在于:所述u形定位板(22)的顶部且靠近后端的位置设有第一限位块(220),所述第一限位块(220)滑动连接于第一定位杆(27)的外侧,所述u形定位板(22)的顶部且靠近前端的位置设有第二限位块(221),所述第二限位块(221)滑动连接于第二定位杆(28)的外侧。
6.根据权利要求1所述的无人机挂载用快拆结构,其特征在于:所述框形固定座(20)的左右两侧且靠近前后两端的位置均开设有u形限位槽(200),四个所述矩形限位块(30)分别位于四个u形限位槽(200)内。
7.根据权利要求1所述的无人机挂载用快拆结构,其特征在于:所述挂载安装座(3)的底部开设有多个供挂载设备安装用的螺纹安装槽(31)。
技术总结本技术涉及无人机技术领域,具体为一种无人机挂载用快拆结构,包括无人机,无人机的底部设有挂载组件,挂载组件包括固定连接于无人机底部的框形固定座,框形固定座内转动连接有双向丝杆,双向丝杆的两个螺纹区均螺纹连接有U形定位板,框形固定座的底部可拆卸连接有用于安装挂载设备的挂载安装座,挂载安装座顶部的左右两侧且靠近前后两端的位置均设有矩形限位块。该无人机挂载用快拆结构,通过转动轴带动主动锥齿轮转动,主动锥齿轮带动从动锥齿轮转动,从而使从动锥齿轮带动双向丝杆转动,使双向丝杆驱动两个U形定位板同步移动,两个U形定位板可以将四个矩形限位块定位在框形固定座的侧面,从而实现挂载安装座与框形固定座的安装。技术研发人员:张勇受保护的技术使用者:北京中斗科技股份有限公司技术研发日:20231206技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/221814.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表