一种无人机弹射方法、设备及可读存储介质与流程
- 国知局
- 2024-08-01 05:55:42
本发明涉及无人机发射,尤其是涉及一种无人机弹射方法、设备及可读存储介质。
背景技术:
1、随着无人机技术的发展,无人机被应用于越来越多的行业与领域,所以无人机发射也面临着多样化的场景与要求。
2、无人机在崎岖的山路执行监测、搜救或数据收集任务时,通常需要从在山路上高速行驶的汽车内快速、稳定地发射,由于在部分山路内停车会导致危险,所以需要在行驶过程中发射无人机,然而汽车在崎岖的山路上行驶时会遭遇各种动态条件,且包括车身的剧烈摇晃,在这些条件下发射无人机极具挑战性。
3、目前市场上的普通无人机发射装置普遍存在以下缺陷:在剧烈摇摆中难以保持稳定的无人机发射,容易对无人机发射造成影响,导致无人机到达目标地点的准确率较低。
技术实现思路
1、本技术提供了一种无人机弹射方法、设备及可读存储介质,用于通过获取当前风速、风向和目标地点,确定发射架角度,再获取汽车行驶颠簸频率、该颠簸幅度,预测汽车行驶的相对平稳时间点,通过考虑汽车行驶颠簸的周期性特征,预测最佳的相对平稳时刻进行发射,可使无人机在汽车颠簸的条件下仍能精确、稳定地达到目标地点,提高了崎岖山路汽车行驶环境下的的无人机发射精度和成功率。
2、第一方面,本技术提供了一种无人机弹射方法,该方法包括:
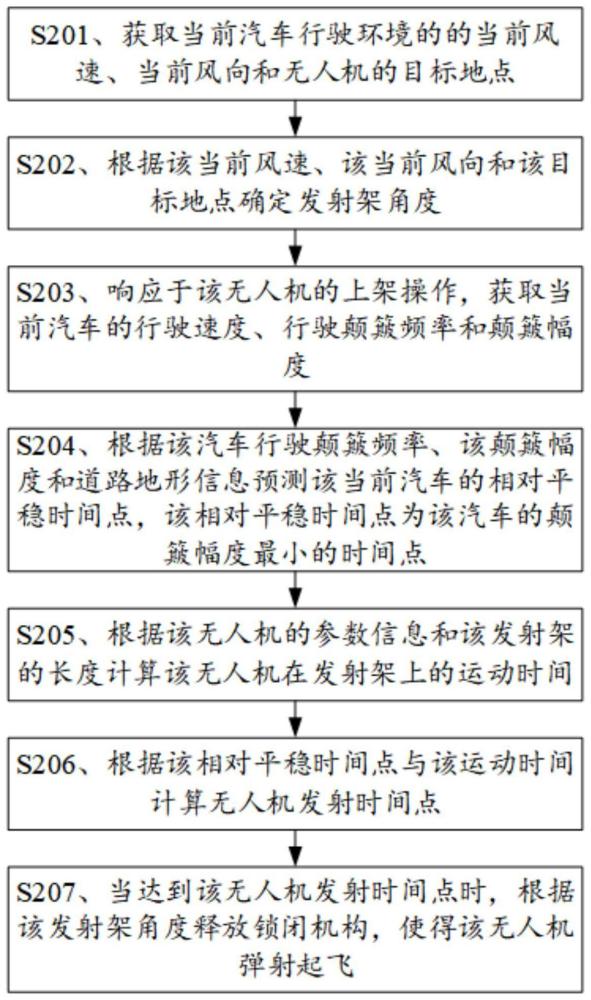
3、获取当前汽车行驶环境的的当前风速、当前风向和无人机的目标地点;
4、根据该当前风速、该当前风向和该目标地点确定发射架角度;
5、响应于该无人机的上架操作,获取当前汽车的行驶速度、行驶颠簸频率和颠簸幅度;
6、根据该汽车行驶颠簸频率、该颠簸幅度和道路地形信息预测该当前汽车的相对平稳时间点,该相对平稳时间点为该汽车的颠簸幅度最小的时间点;
7、根据该无人机的参数信息和该发射架的长度计算该无人机在发射架上的运动时间;
8、根据该相对平稳时间点与该运动时间计算无人机发射时间点,该无人机发射时间为该相对平稳时间点减去该运动时间得到的时间点;
9、当达到该无人机发射时间点时,根据该发射架角度释放锁闭机构,使得该无人机弹射起飞。
10、通过采用上述技术方案,通过获取当前风速、风向和目标地点,确定发射架角度,再获取汽车行驶颠簸频率、该颠簸幅度,预测汽车行驶的相对平稳时间点,通过考虑汽车行驶颠簸的周期性特征,预测最佳的相对平稳时刻进行发射,可使无人机在汽车颠簸的条件下仍能精确、稳定地达到目标地点,提高了崎岖山路汽车行驶环境下的的无人机发射精度和成功率。
11、结合第一方面的一些实施例,在一些实施例中,该根据该当前风速、所
12、述当前风向和该目标地点确定发射架角度的步骤,具体包括:
13、计算该目标地点与该发射架的方位角;
14、将该方位角、该当前风速和该当前风向输入至角度系数计算模型得到风速系数;
15、基于该方位角和该风速系数确定发射架角度,该发射架角度为该方位角与该风速系数的乘积。
16、通过采用上述技术方案,通过计算目标点与发射架的方位角,结合当前风速风向输入计算模型得到风速系数,再基于方位角和风速系数确定发射架角度,实现了考虑风速风向因素的发射架角度确定,提高无人机发射的精度和成功率。
17、结合第一方面的一些实施例,在一些实施例中,该根据该汽车行驶颠簸频率、该颠簸幅度和道路地形信息预测该当前汽车的相对平稳时间点的步骤,具体包括:
18、根据该汽车行驶速度建立汽车运动信号函数;
19、根据该汽车行驶颠簸频率和颠簸幅度建立颠簸信号函数;
20、确定该汽车运动信号函数与该颠簸信号函数之间的平均相位差;
21、根据该汽车运动信号函数、该颠簸信号函数、该平均相位差和道路地形信息预测出该当前汽车的相对平稳时间点。
22、通过采用上述技术方案,通过建立汽车运动信号函数和颠簸信号函数,确定两者相位差,并通过道路地形信息来精确预测汽车颠簸的相对平稳点,能够计算复杂崎岖山路上的最佳发射时机,使无人机发射更加准确可控,提升了汽车上的无人机发射的成功率。
23、结合第一方面的一些实施例,在一些实施例中,在根据该相对平稳时间点与该运动时间计算无人机发射时间点的步骤之后,该步骤还包括:
24、控制发射辅助设备进行匀速运动,该发射辅助设备用于搭载该发射架和该无人机;
25、当达到该无人机发射时间点时,对该发射辅助设备进行制动。
26、通过采用上述技术方案,通过控制发射辅助设备进行匀速运动,在计算出的发射时间对其进行制动,以将无人机精确发射出去,能够使得无人机在发射时具有一定的初速度,防止发射失败。
27、结合第一方面的一些实施例,在一些实施例中,在根据该相对平稳时间点与该运动时间计算无人机发射时间点的步骤之后,该步骤还包括:
28、获取该无人机的型号参数信息;
29、根据该型号参数信息在预设加速度数据库中确定该无人机对应的加速度曲线;
30、当达到该无人机发射时间点时,按照该加速度曲线对该无人机进行加速。
31、通过采用上述技术方案,通过获取无人机的参数,根据参数在预设数据库中确定对应的加速度曲线,并在发射时按照该加速度曲线对无人机进行加速,能够让不同型号的无人机在发射时都具有最佳的、适合自身的加速度,避免对无人机的过大冲击,提高了发射的平稳性和无人机的安全性。
32、结合第一方面的一些实施例,在一些实施例中,在获取当前汽车行驶环境的的当前风速、当前风向和无人机的目标地点的步骤之后,该步骤还包括:
33、获取目标地点的图像信息;
34、将该图像信息输入图像处理模型中,识别该图像信息内的障碍遮挡物,得到该目标地点的障碍遮挡率;
35、若该障碍遮挡率大于预设遮挡率阈值,则发出提示信息,该提示信息用于提示用户更换该目标地点。
36、通过采用上述技术方案,通过对目标地点获取图像,使用图像处理技术识别障碍物并计算遮挡率,如果遮挡率过大,提示用户更换目标地点,能够利用计算机视觉算法自动检测目标地点的适宜性,避免选择视野遮挡严重的地点进行任务,减少了无人机起飞后目标难辨识的情况,提高了任务的成功率和效率。
37、结合第一方面的一些实施例,在一些实施例中,在根据该当前风速、该当前风向和该目标地点确定发射架角度的步骤之后,该步骤还包括:
38、检测该发射架是否到达指定俯仰角度和指定旋转角度;
39、若到达该指定俯仰角度和该指定旋转角度,固定该发射架。
40、通过采用上述技术方案,通过检测后固定发射架,避免了因汽车随机颠簸导致的发射架角度改变,固定发射架的稳定角度可以确保无人机能够以精确预计的方向和姿态弹射飞出,大大提升了汽车颠簸的条件下无人机弹射的准确性和可靠性。
41、第二方面,本技术实施例提供一种无人机弹射设备,该设备包括:
42、第一获取模块,用于获取当前汽车行驶环境的的当前风速、当前风向和无人机的目标地点;
43、确定模块,用于根据该当前风速、该当前风向和该目标地点确定发射架角度;
44、第二获取模块,用于响应于该无人机的上架操作,获取当前汽车的行驶速度、行驶颠簸频率和颠簸幅度;
45、预测模块,用于根据该汽车行驶颠簸频率、该颠簸幅度和道路地形信息预测该当前汽车的相对平稳时间点,该相对平稳时间点为该汽车的颠簸幅度最小的时间点;
46、第一计算模块,用于根据该无人机的参数信息和该发射架的长度计算该无人机在发射架上的运动时间;
47、第二计算模块,用于根据该相对平稳时间点与该运动时间计算无人机发射时间点,该无人机发射时间为该相对平稳时间点减去该运动时间得到的时间点;
48、释放模块,用于当达到该无人机发射时间点时,根据该发射架角度释放锁闭机构,使得该无人机弹射起飞。
49、第三方面,本技术实施例提供了一种无人机弹射设备,该设备包括:一个或多个处理器和存储器;该存储器与该一个或多个处理器耦合,该存储器用于存储计算机程序代码,该计算机程序代码包括计算机指令,该一个或多个处理器调用该计算机指令以使得该设备执行如第一方面以及第一方面中任一可能的实现方式描述的方法。
50、第四方面,本技术实施例提供一种包含指令的计算机程序产品,当上述计算机程序产品在无人机弹射设备上运行时,使得上述无人机弹射设备执行如第一方面以及第一方面中任一可能的实现方式描述的方法。
51、第五方面,本技术实施例提供一种计算机可读存储介质,包括指令,当上述指令在无人机弹射设备上运行时,使得上述无人机弹射设备执行如第一方面以及第一方面中任一可能的实现方式描述的方法。
52、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
53、1.本技术通过获取当前风速、风向和目标地点,确定发射架角度,再获取汽车行驶颠簸频率、该颠簸幅度,预测汽车行驶的相对平稳时间点,通过考虑汽车行驶颠簸的周期性特征,预测最佳的相对平稳时刻进行发射,可使无人机在汽车颠簸的条件下仍能精确、稳定地达到目标地点,提高了崎岖山路汽车行驶环境下的的无人机发射精度和成功率。
54、2.本技术通过建立汽车运动信号函数和颠簸信号函数,确定两者相位差,并通过道路地形信息来精确预测汽车颠簸的相对平稳点,能够计算复杂崎岖山路上的最佳发射时机,使无人机发射更加准确可控,提升了汽车上的无人机发射的成功率。
55、3.本技术通过对目标地点获取图像,使用图像处理技术识别障碍物并计算遮挡率,如果遮挡率过大,提示用户更换目标地点,能够利用计算机视觉算法自动检测目标地点的适宜性,避免选择视野遮挡严重的地点进行任务,减少了无人机起飞后目标难辨识的情况,提高了任务的成功率和效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221975.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表