一种多视角采集的无人机遥感信息采集装置的制作方法
- 国知局
- 2024-08-01 05:58:34
本技术涉及信息采集,具体为一种多视角采集的无人机遥感信息采集装置。
背景技术:
1、无人机遥感,即利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、gps差分定位技术和遥感应用技术,能够实现自动化、智能化、专用化快速获取国土资源、自然环境、地震灾区等空间遥感信息,且完成遥感数据处理、建模和应用分析的应用技术。
2、公告号cn 219468051 u的一种基于无人机的遥感影像采集装置,在需要调节影像采集设备的角度时,可以通过转动丝杆使其圆周表面的丝杆螺母进行移动,并带动齿条进行移动从而带动与之啮合的齿轮进行转动,并带动转轴以及转轴上固定连接的影像采集设备进行转动,从而提高影像采集设备的采集角度,进而提高影像采集设备的采集效率。
3、该基于无人机的遥感影像采集装置,通过转动丝杆使其圆周表面的丝杆螺母进行移动,并带动齿条进行移动从而带动与之啮合的齿轮进行转动,并带动转轴以及转轴上固定连接的影像采集设备进行转动,提高影像采集设备的采集角度,该装置只能够对采集设备进行上下调节,不能够对采集设备进行左右调节,当采集设备的采集范围较小,需要进行左右调节时,该装置不能够满足这一需求,因此需要改进。
技术实现思路
1、本实用新型的目的在于提供一种多视角采集的无人机遥感信息采集装置,以解决上述背景技术中提出的问题。
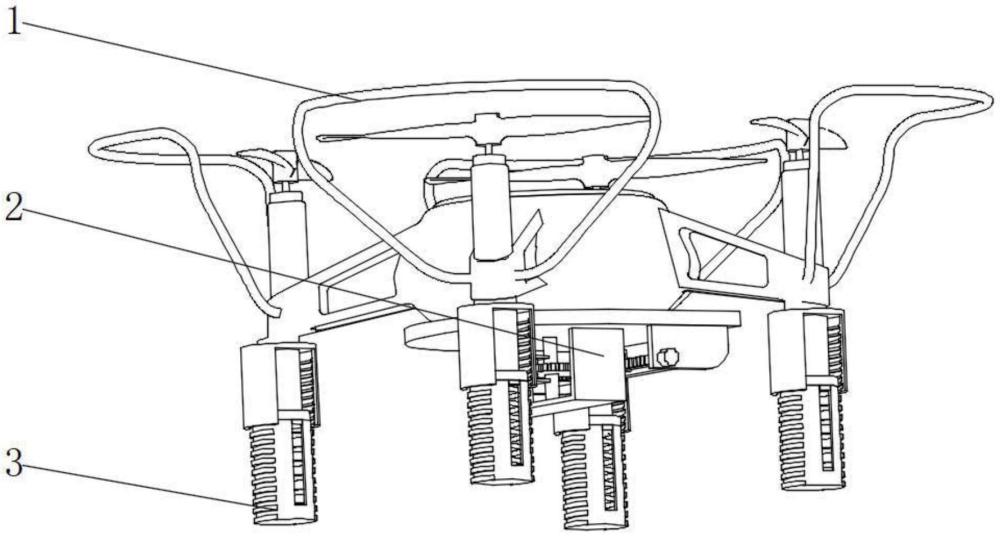
2、为实现上述目的,本实用新型提供如下技术方案:一种多视角采集的无人机遥感信息采集装置,包括无人机本体,所述无人机本体底部中间设置有转动调节机构,所述无人机本体底部固定连接有缓冲机构;
3、所述转动调节机构包括转动组件跟调节组件,所述转动组件设置于无人机本体底部,所述调节组件设置于转动组件正面。
4、优选的,所述转动组件包括连接板,所述连接板固定连接于无人机本体底部,所述连接板底部固定连接有u型板,所述u型板内底部转动连接有第二转动杆,所述第二转动杆顶部转动连接于连接板底部,所述第二转动杆外围固定连接有齿轮,所述齿轮背端啮合有齿条,所述齿条右侧固定连接有气缸,所述气缸左侧固定连接有固定板,所述固定板固定连接于连接板底部背端,所述齿条背端固定连接有联动杆,所述联动杆背端固定连接有滑板,所述滑板内部滑动连接有固定杆,所述固定杆固定连接于固定板内侧。
5、优选的,所述联动杆有三个,三个联动杆分别固定连接于齿条背端,通过设置的三个联动杆,使齿条在移动的过程中,更加稳定。
6、优选的,所述调节组件包括短杆,所述短杆固定连接有齿轮顶部和底部,所述短杆顶部固定连接有连接架,所述连接架右侧固定连接有垫板,所述垫板正面固定连接有电机,所述电机正面固定连接有蜗杆,所述蜗杆顶部啮合有蜗轮,所述蜗轮左侧固定连接有第一转动杆,所述第一转动杆左侧转动连接于连接架内左侧,所述第一转动杆外围固定连接有影像采集器。
7、优选的,所述连接架内部开设有与第一转动杆尺寸相对应的固定孔,且第一转动杆转动连接于该固定孔内部,使蜗轮转动时,能够通过第一转动杆带动影像采集器转动,使影像采集器的上下探测角度能够进行调节。
8、优选的,所述缓冲机构包括滑杆,所述滑杆固定连接于无人机本体底部,所述滑杆底部固定连接有按压盘,所述按压盘外围滑动连接有固定筒,所述固定筒左右两侧固定连接有第一阻尼,所述固定筒内底部固定连接有弹簧,所述弹簧顶部固定连接于按压盘底部,所述滑杆外围固定连接有第二阻尼。
9、优选的,所述第一阻尼设置于第二阻尼右侧,且第一阻尼左侧与第二阻尼右侧相互贴合,通过弹簧、第一阻尼跟第二阻尼相互配合使用,使固定筒能够迅速恢复原位,使无人机本体底部不易接触地面,使无人机本体不易损坏。
10、与现有技术相比,本实用新型提供了一种多视角采集的无人机遥感信息采集装置,具备以下有益效果:
11、1、该多视角采集的无人机遥感信息采集装置,通过设置的转动调节机构,当需要对影像采集器左右探测位置进行调节时,打开气缸,使气缸推动滑板移动,使滑板通过联动杆带动齿条移动,使齿条能够带动齿轮转动,使齿轮通过短杆带动连接架移动,使连接架能够带动影像采集器进行左右转动,当需要对影像采集器的上下弹出角度进行调节时,打开电机,使电机能够通过蜗杆带动蜗轮转动,使蜗轮通过第一转动杆带动影像采集器转动,使影像采集器的上下探测角度能够进行调节。
12、2、该多视角采集的无人机遥感信息采集装置,通过设置的缓冲机构,当无人机本体停止使用时,无人机向下移动,当固定筒底部接触地面时,固定筒能够向上移动,使固定筒能够对弹簧进行挤压,当固定筒向上移动时,能够带动第一阻尼向上移动,使第一阻尼能够与第二阻尼相互接触,通过弹簧、第一阻尼跟第二阻尼相互配合使用,使固定筒能够迅速恢复原位,使无人机本体底部不易接触地面,使无人机本体不易损坏。
技术特征:1.一种多视角采集的无人机遥感信息采集装置,包括无人机本体(1),其特征在于:所述无人机本体(1)底部中间设置有转动调节机构(2),所述无人机本体(1)底部固定连接有缓冲机构(3);
2.根据权利要求1所述的一种多视角采集的无人机遥感信息采集装置,其特征在于:所述转动组件(22)包括连接板(222),所述连接板(222)固定连接于无人机本体(1)底部,所述连接板(222)底部固定连接有u型板(223),所述u型板(223)内底部转动连接有第二转动杆(2291),所述第二转动杆(2291)顶部转动连接于连接板(222)底部,所述第二转动杆(2291)外围固定连接有齿轮(221),所述齿轮(221)背端啮合有齿条(228),所述齿条(228)右侧固定连接有气缸(224),所述气缸(224)左侧固定连接有固定板(225),所述固定板(225)固定连接于连接板(222)底部背端,所述齿条(228)背端固定连接有联动杆(227),所述联动杆(227)背端固定连接有滑板(226),所述滑板(226)内部滑动连接有固定杆(229),所述固定杆(229)固定连接于固定板(225)内侧。
3.根据权利要求2所述的一种多视角采集的无人机遥感信息采集装置,其特征在于:所述联动杆(227)有三个,三个联动杆(227)分别固定连接于齿条(228)背端。
4.根据权利要求1所述的一种多视角采集的无人机遥感信息采集装置,其特征在于:所述调节组件(21)包括短杆(211),所述短杆(211)固定连接有齿轮(221)顶部和底部,所述短杆(211)顶部固定连接有连接架(218),所述连接架(218)右侧固定连接有垫板(212),所述垫板(212)正面固定连接有电机(213),所述电机(213)正面固定连接有蜗杆(214),所述蜗杆(214)顶部啮合有蜗轮(215),所述蜗轮(215)左侧固定连接有第一转动杆(216),所述第一转动杆(216)左侧转动连接于连接架(218)内左侧,所述第一转动杆(216)外围固定连接有影像采集器(217)。
5.根据权利要求4所述的一种多视角采集的无人机遥感信息采集装置,其特征在于:所述连接架(218)内部开设有与第一转动杆(216)尺寸相对应的固定孔,且第一转动杆(216)转动连接于该固定孔内部。
6.根据权利要求1所述的一种多视角采集的无人机遥感信息采集装置,其特征在于:所述缓冲机构(3)包括滑杆(34),所述滑杆(34)固定连接于无人机本体(1)底部,所述滑杆(34)底部固定连接有按压盘(36),所述按压盘(36)外围滑动连接有固定筒(31),所述固定筒(31)左右两侧固定连接有第一阻尼(33),所述固定筒(31)内底部固定连接有弹簧(32),所述弹簧(32)顶部固定连接于按压盘(36)底部,所述滑杆(34)外围固定连接有第二阻尼(35)。
7.根据权利要求6所述的一种多视角采集的无人机遥感信息采集装置,其特征在于:所述第一阻尼(33)设置于第二阻尼(35)右侧,且第一阻尼(33)左侧与第二阻尼(35)右侧相互贴合。
技术总结本技术涉及信息采集技术领域,且公开了一种多视角采集的无人机遥感信息采集装置,包括无人机本体,所述无人机本体底部中间设置有转动调节机构,所述无人机本体底部固定连接有缓冲机构,所述转动调节机构包括转动组件跟调节组件,所述转动组件设置于无人机本体底部,所述调节组件设置于转动组件正面。打开气缸,使气缸推动滑板移动,使滑板通过联动杆带动齿条移动,使齿条能够带动齿轮转动,使齿轮通过短杆带动连接架移动,使连接架能够带动影像采集器进行左右转动,当需要对影像采集器的上下弹出角度进行调节时,打开电机,使电机能够通过蜗杆带动蜗轮转动,使蜗轮通过第一转动杆带动影像采集器转动,使影像采集器的上下探测角度能够进行调节。技术研发人员:赵强,杨天时,徐开敏受保护的技术使用者:陕西星辰时代科技发展有限公司技术研发日:20231219技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/222218.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。