跨介质飞行器及其降落入水、出水起飞方法与流程
- 国知局
- 2024-08-01 06:03:45
本发明涉及跨介质飞行器,具体涉及一种跨介质飞行器及其降落入水方法和出水起飞方法。
背景技术:
1、水空跨介质飞行器是一种可以在水中航行和空中飞行并能自由实现水空介质跨越的新概念航行器。跨介质飞行器结合了无人机的高机动性和水下航行器的高隐蔽性,具备传统无人机无法比拟的优势。在民用方面,跨介质飞行器可应用于海上搜救、水质检测、水下生物观测、气象预报特和特殊任务执行等使命;在军用领域,跨介质飞行器可以用于军事侦察、情报收集、通信中继、电子战等方面。
2、跨介质飞行器的主要工作模态为空中航行和水下潜行,在完成任务指令后,跨介质飞行器通常在水中漂浮待命,等待下一个任务指令。受限于动力续航因素,飞行器在动力耗尽前需要返航,难以实现长时间海洋监测等任务,航程、航时和作业时间都受到了较大限制。另外,现有的跨介质飞行器在从空中入水的过程中,通过整机倾斜增大迎角的方式入水,其存在的问题为:机翼大迎角状态下飞行会发生失速等不稳定现象。
技术实现思路
1、针对上述技术问题,本发明提供一种跨介质飞行器及其降落入水方法和出水起飞方法。
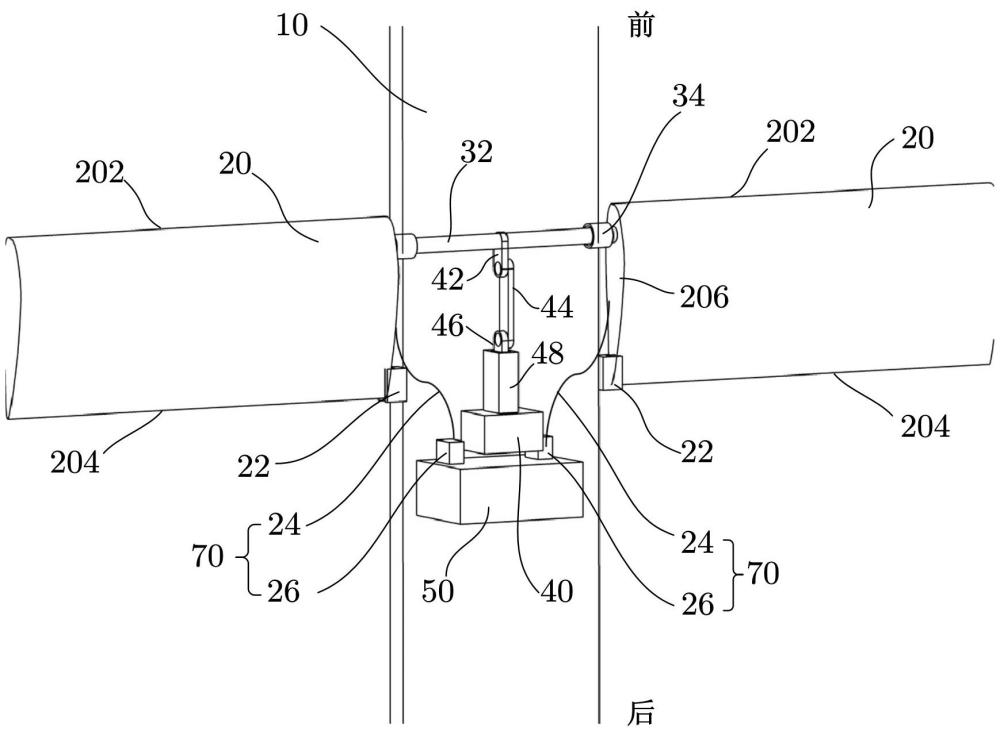
2、一种跨介质飞行器,包括机身、机翼、旋转轴、轴承、机翼固定锁和机翼复位辅助装置。旋转轴沿垂直于机翼的弦线的方向贯穿机身,机翼固定安装于旋转轴上,且旋转轴与机翼的连接部位靠近机翼的前缘。轴承固定安装在机身上,旋转轴与轴承铰接。机翼固定锁设置于机身上,机翼具有固定状态和释放状态;当机翼呈固定状态时,机翼固定锁与机翼耦接;当机翼呈释放状态时,机翼固定锁与机翼脱离耦接。机翼复位辅助装置设置于机身上,机翼复位辅助装置被构造成能够驱动处于释放状态的机翼运动以与机翼固定锁耦接。
3、在一些实施方式种,机翼复位辅助装置被构造成包括收放绳和电动收绳器;电动收绳器固定设置于机身的内部;收放绳的一端连接至机翼,另一端连接至电动收绳器。
4、进一步地,跨介质飞行器还包括设置于机身内部的电源及控制系统、发电机、固定连杆、运动连杆、活塞杆和液压缸。固定连杆固定连接于旋转轴,固定连杆、运动连杆和活塞杆依次铰接,活塞杆耦接至液压缸,液压缸耦接至发电机,发电机与电源及控制系统电连接。
5、优选地,机翼固定锁的设置位置为:当机翼处于固定状态时,机翼固定锁耦接于机翼的翼根的尾缘。优选地,机翼固定锁被构造成电磁锁。
6、在另一些实施方式种,跨介质飞行器还包括电源及控制系统;机翼复位辅助装置被构造成直驱电机,直驱电机的输出轴可伸缩地耦接至机翼,直驱电机与电源及控制系统电连接。
7、进一步地,跨介质飞行器的头部设有空气螺旋桨,尾部设有水下螺旋桨。
8、前述跨介质飞行器的降落入水方法,包括步骤:使机翼固定锁解除对机翼的固定限制,机翼从固定状态转变为释放状态;使机身绕旋转轴转动至机身的头部上扬,使得入水时机身的尾部先行着水。
9、在一些实施方式种,跨介质飞行器的重心位于旋转轴的后方,机身在重力作用下自动地绕旋转轴转动。
10、前述跨介质飞行器的出水起飞方法,出水之前的跨介质飞行器处于水面漂浮状态,机翼处于释放状态,出水起飞方法包括:启动空气螺旋桨和/或水下螺旋桨转动,为跨介质飞行器提供出水的升力;上升过程中,通过气动力和机翼复位辅助装置驱动机翼绕旋转轴转动至与机翼固定锁耦接,机翼从释放状态转变为固定状态。
11、本公开的特点及优点包括:
12、本发明的跨介质飞行器,通过设置具有释放状态的机翼,入水时可实现仅机身发生旋转,机翼的迎角不发生明显变化,可避免机翼大迎角状态下飞行发生失速等不稳定现象;通过设置具有释放状态的机翼、旋转轴和发电系统,当在水面漂浮时,可以通过波浪拍打机翼运动将波浪能转换成电能,提高飞行器的续航能力和工作时长。
13、本发明的跨介质飞行器的降落入水方法,使机翼呈释放状态仅机身旋转,机翼的迎角基本不变,避免了机翼大迎角状态下飞行发生失速等不稳定现象;机身尾部先行着水,有助于保持飞行器的稳定性和平衡性;着水部位固定,便于针对性地对机身尾部进行结构加强处理,提升整机的安全性。
14、本发明的跨介质飞行器的出水起飞方法,起飞之前机翼处于释放状态,飞行器先在水面漂浮状态下通过波浪拍打机翼运动将机械能转变成电能,再调节机翼至固定状态出水,可以提高飞行器的空中续航工作时间。跨介质飞行器在出水前处于水上漂浮状态,机头及空气螺旋桨在空中,机尾及水下螺旋桨在水下,且机体轴线方向与水面近似于垂直。在出水时,空气螺旋桨与水下螺旋桨同时旋转,推进飞行器机体垂直出水。该出水方式的有益效果包括:1)螺旋桨在适应的作业环境中转动,能发挥最佳功率,避免了空气螺旋桨近水面转动时水浪对螺旋桨带来的功率损失。2)出水姿态为垂直出水,推力与重力方向相反,且水面润湿面积低,出水效率高。
技术特征:1.一种跨介质飞行器,其特征在于,包括:机身(10)、机翼(20)、旋转轴(32)、轴承(34)、机翼固定锁(22)和机翼复位辅助装置(70);
2.根据权利要求1所述的跨介质飞行器,其特征在于,所述机翼复位辅助装置(70)被构造成包括收放绳(24)和电动收绳器(26);所述电动收绳器(26)固定设置于所述机身(10)的内部;所述收放绳(24)的一端连接至所述机翼(20),另一端连接至所述电动收绳器(26)。
3.根据权利要求2所述的跨介质飞行器,其特征在于,还包括设置于所述机身(10)内部的电源及控制系统(50)、发电机(40)、固定连杆(42)、运动连杆(44)、活塞杆(46)和液压缸(48);
4.根据权利要求3所述的跨介质飞行器,其特征在于,所述机翼固定锁(22)的设置位置为:当机翼(20)处于固定状态时,机翼固定锁(22)耦接于机翼(20)的翼根(206)的尾缘(204)。
5.根据权利要求4所述的跨介质飞行器,其特征在于,所述机翼固定锁(22)被构造成电磁锁。
6.根据权利要求1所述的跨介质飞行器,其特征在于,还包括电源及控制系统(50);所述机翼复位辅助装置(70)为直驱电机,所述直驱电机的输出轴可伸缩地耦接至所述机翼(20),所述直驱电机与所述电源及控制系统(50)电连接。
7.根据权利要求1~6任一项所述的跨介质飞行器,其特征在于,所述跨介质飞行器的头部设有空气螺旋桨(62),尾部设有水下螺旋桨(64)。
8.一种如权利要求7所述的跨介质飞行器的降落入水方法,其特征在于,包括步骤:
9.如权利要求8所述的降落入水方法,其特征在于,所述跨介质飞行器的重心位于所述旋转轴(32)的后方,所述机身(10)在重力作用下自动地绕旋转轴(32)转动。
10.一种如权利要求7所述的跨介质飞行器的出水起飞方法,其特征在于,出水之前的所述跨介质飞行器处于水面漂浮状态,所述机翼(20)处于释放状态,所述出水起飞方法包括:
技术总结本发明涉及跨介质飞行器技术领域,提供跨介质飞行器及其降落入水、出水起飞方法。跨介质飞行器包括机身、机翼、旋转轴、轴承、机翼固定锁和机翼复位辅助装置。旋转轴沿垂直于机翼的弦线的方向贯穿机身,机翼固定安装于旋转轴上,且旋转轴与机翼的连接部位靠近机翼的前缘。轴承固定安装在机身上,旋转轴与轴承铰接。机翼固定锁设置于机身上,机翼具有固定状态和释放状态。机翼复位辅助装置设置于机身上,机翼复位辅助装置能够驱动处于释放状态的机翼运动以与机翼固定锁耦接。本发明通过设置具有释放状态的机翼,可避免机翼大迎角状态下飞行发生失速等不稳定现象。技术研发人员:周后村,高福奎,余雷,张哲,白兴之,柴璞鑫,吴文华,王宇受保护的技术使用者:中国空气动力研究与发展中心空天技术研究所技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/222660.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表