一种抗大弯矩集成翼控伺服电动舵机的制作方法
- 国知局
- 2024-08-01 06:16:35
本申请属于电动舵机,具体而言涉及一种抗大弯矩集成翼控伺服电动舵机。
背景技术:
1、电动舵机是各种水下潜航器、航空航天飞行器运行姿态控制的执行子系统,根据飞行器的综控机给出的指令,控制驱动潜航器的舵鳍、飞行器的舵面、航翼角度,进而产生流体动力,实现潜航器与飞行器本体稳定与姿态控制,使得潜航器与飞行器按照预定的姿态与轨迹进行推进、飞行。
2、目前使用的电动舵机主要有有直齿齿轮减速器、行星齿轮减速器、滚珠丝杠和谐波减速器等结构形式,而谐波减速器具有传动比大、体积小、回差小、传动效率较高和设计合理,因此在舵机减速器结构常选择使用谐波减速器作为有空间限制、传动精度高的潜航器与飞行器的舵系统传动机构。
3、现有超音速飞行器和水下潜航器快速响应都对高刚度和高扭矩的电动舵机提出高要求。采用谐波减速器的舵机具有体积小的特点,但是在大扭矩与大弯矩的载荷作用下,减速器的舵轴会引起挠性变形,与柔轮正常变形耦合,引起舵机减速器卡死,进而导致任务失败。因此,超音速飞行器与水下潜航器的高动态特性、快速响应特性以及大扭矩与大弯矩耦合的复杂工况下,对舵机的整机刚度和输出能力提出迫切需求,是急需解决的技术问题。
技术实现思路
1、鉴于上述的分析,本实用新型实施例旨在提供一种抗大弯矩集成翼控伺服电动舵机,用以解决现有技术中存在的上述问题中的一者或多者。
2、本实用新型的目的是这样实现的:
3、一种抗大弯矩集成翼控伺服电动舵机,包括:
4、舵机主体,具有电机、舵轴和传动机构,所述电机通过所述传动机构与舵轴连接;
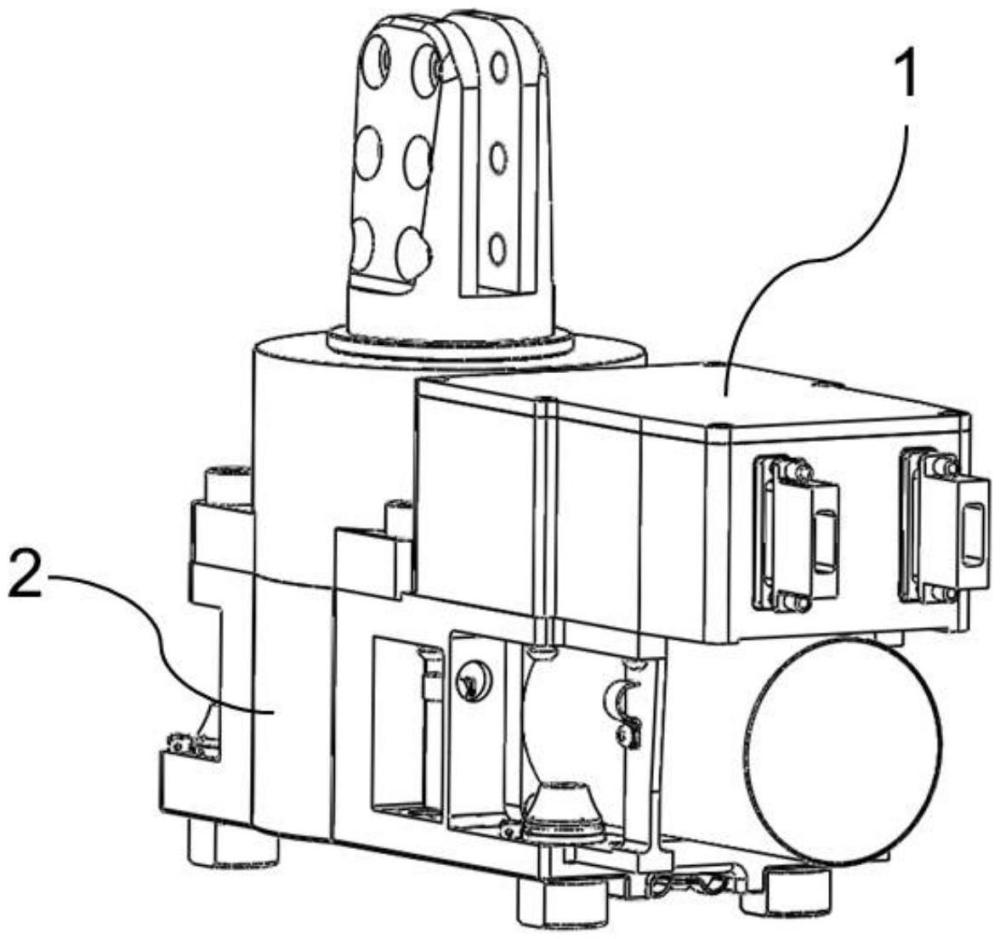
5、控制驱动器,集成设于所述舵机主体上;
6、其中,所述舵轴与所述电机的输出轴垂直,所述控制驱动器固定安装在所述电机与所述舵轴形成的直角空间内。
7、进一步地,所述舵机主体还具有第一壳体,所述舵轴通过深沟球轴承和滚针轴承转动设于所述第一壳体内;所述深沟球轴承靠近所述舵轴的输出端设置,所述滚针轴承设于所述舵轴的尾端。
8、进一步地,所述舵轴尾部与高精度电位计过盈配合连接。
9、进一步地,所述控制驱动器包括第二壳体,所述第二壳体的顶部可拆卸的设有控制器盖板,所述第二壳体的内部设有电源板、控制板和驱动模组。
10、进一步地,所述第一壳体具有上壳体和下壳体,所述上壳体与下壳体通过螺钉紧固联接;所述第二壳体与所述下壳体之间设有四个缓冲总成。
11、进一步地,所述舵机主体还包括柔轮、大锥齿轮、波发生器柔性轴承和上壳体;所述柔轮固定连接在所述舵轴上,所述波发生器柔性轴承的内圈与大锥齿轮固定连接;所述柔轮、大锥齿轮、波发生器柔性轴承和上壳体组成谐波减速器。
12、进一步地,所述柔轮通过柔轮安装垫板、柔轮压板和柔轮紧固螺钉固定在所述舵轴上。
13、进一步地,所述上壳体的顶部设置舵轴孔,所述舵轴的顶端穿出所述舵轴孔;所述舵轴上套设由防尘圈,被配置为密封遮挡所述舵轴与所述舵轴孔之间的空隙。
14、进一步地,所述传动机构包括大锥齿轮和小锥齿轮,大锥齿轮与小锥齿轮啮合,所述电机通过所述小锥齿轮和大锥齿轮实现90°转向传动。
15、进一步地,所述舵轴采用钛合金或者合金钢材料制成。
16、与现有技术相比,本实用新型至少可实现如下有益效果之一:
17、a)本实用新型提供的抗大弯矩集成翼控伺服电动舵机,舵轴靠近输出端采用深沟球轴承支撑,舵轴尾端采用滚针轴承支撑,通过深沟球轴承作为支点支撑作用,滚针轴承在选型极小尺寸规格情况下能够承受大载荷,进而提升舵轴承受大弯矩作用载荷能力。
18、b)本实用新型提供的抗大弯矩集成翼控伺服电动舵机,将控制驱动器集成设于舵机主体上,采用模块化、集成化设计,便于实现设备集成与小型化。
19、c)本实用新型提供的抗大弯矩集成翼控伺服电动舵机,能够满足超音速、超高音速飞行器与水下潜航器的大弯矩和大扭矩下的高动态、快速响应特性需求,可在超音速、超高音速条件下和大负载水下潜航器使用。
技术特征:1.一种抗大弯矩集成翼控伺服电动舵机,其特征在于,包括:
2.根据权利要求1所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述舵机主体(2)还具有第一壳体,所述舵轴(2-1)通过深沟球轴承(2-2)和滚针轴承(2-13)转动设于所述第一壳体内;
3.根据权利要求2所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述舵轴(2-1)尾部与高精度电位计(8)过盈配合连接。
4.根据权利要求3所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述控制驱动器(1)包括第二壳体(1-2),所述第二壳体(1-2)的顶部可拆卸的设有控制器盖板(1-3),所述第二壳体(1-2)的内部设有电源板(1-5)、控制板(1-4)和驱动模组(1-6)。
5.根据权利要求4所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述第一壳体具有上壳体(2-11)和下壳体(2-21),所述上壳体(2-11)与下壳体(2-21)通过螺钉紧固联接;
6.根据权利要求5所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述舵机主体(2)还包括柔轮(2-7)、大锥齿轮(2-8)、波发生器柔性轴承(2-10)和上壳体(2-11);所述柔轮(2-7)固定连接在所述舵轴(2-1)上,所述波发生器柔性轴承(2-10)的内圈与大锥齿轮(2-8)固定连接;
7.根据权利要求6所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述柔轮(2-7)通过柔轮安装垫板(2-4)、柔轮压板(2-5)和柔轮紧固螺钉(2-6)固定在所述舵轴(2-1)上。
8.根据权利要求5所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述上壳体(2-11)的顶部设置舵轴孔,所述舵轴(2-1)的顶端穿出所述舵轴孔;
9.根据权利要求1所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述传动机构包括大锥齿轮(2-8)和小锥齿轮(2-15),大锥齿轮(2-8)与小锥齿轮(2-15)啮合,所述电机(2-17)通过所述小锥齿轮(2-15)和大锥齿轮(2-8)实现90°转向传动。
10.根据权利要求1所述的抗大弯矩集成翼控伺服电动舵机,其特征在于,所述舵轴(2-1)采用钛合金或者合金钢材料制成。
技术总结本申请涉及一种抗大弯矩集成翼控伺服电动舵机,包括舵机主体和控制驱动器,控制驱动器集成设于所述舵机主体上;舵机主体具有电机、舵轴和传动机构,所述电机通过所述传动机构与舵轴连接;其中,所述舵轴与所述电机的输出轴垂直,所述控制驱动器固定安装在所述电机与所述舵轴形成的直角空间内。本申请具有高精度、高刚度、高动态、高可靠性、高寿命、快速响应的优点。技术研发人员:李玉钦,亢金涛,尚刚受保护的技术使用者:成都智腾承启科技有限公司技术研发日:20231122技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/223091.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
悬吊拆卸装置的制作方法
下一篇
返回列表