一种长航时尾座式混合动力垂直起降无人机及飞行控制方法
- 国知局
- 2024-08-01 06:17:10
本发明属于航空领域,具体涉及一种长航时尾座式混合动力垂直起降无人机及方法。
背景技术:
1、尾座式无人机是一种倾转动力式可垂直起降无人机,其将动力固定安装在机翼或机身上,起飞后随飞机机体一起倾转,完成垂直起降拉力和平飞推进力之间的转换。相比于类似v-22“鱼鹰”这样的倾转旋翼机,尾座式无人机无飞行模式转换所需的动力倾转机构,具有构型简单、结构重量轻等优点,在可垂直起降固定翼飞机中具有较大的发展前景。
2、尾座式无人机在垂直起降阶段一般采用三种控制方式:第一种为将动力螺旋桨安装在机翼前,利用流过的螺旋桨滑流产生机翼舵面控制力,为提高控制力,其舵面相比一般固定翼飞机偏大;第二种为在机翼和垂尾尖等部位分散布置多个电机,利用多个电机之间的拉力差进行控制,在平飞后关闭部分电机;第三为动力矢量控制方式,将螺旋桨设计为可小幅度偏转,或者采用涵道驱动,在涵道后方安装偏转片。
3、对于螺旋桨采用电驱动的尾座式无人机,电力来源一般为动力电池,因为目前电池能量密度低,造成飞机航时短,载荷量小。对于采用串联式混合动力系统的尾座式无人机,从燃油发动机到发电机再到驱动电机,能量转换层级多,总体能量转换效率低,航时提升有限。而采用单台燃油动力的尾座式无人机,由于使用一套动力系统提供垂直起降升力和水平飞行的推进力,而通常垂直起降状态下所需动力功率是最大的,固定翼巡航飞行所需功率较小,因此其动力装置功率及重量相比于无垂直起降功能的固定翼飞机要大很多,并且在巡航飞行时动力功率富余过多,耗油率增大,由此导致无人机空机重比大、载荷能力小和续航时间短。
4、目前广泛使用的四旋翼加燃油驱动固定翼构型的垂直起降无人机,采用电驱动螺旋桨进行垂直起降结合燃油驱动进行固定翼巡航飞行的混合驱动方式,实现了较长的续航时间(约6小时),但垂直起降和固定翼飞行采用了两套单独的动力系统,在不同的飞行阶段互为不发挥作用的“死重”,电机和电池重量占比大,载荷能力低,续航时间提升空间有限。
5、此外,对于尾座式无人机,在垂直起降阶段其机翼也处于竖直状态,成为较大的迎风面,因此在此阶段易受外界风干扰,特别是利用螺旋桨滑流产生机翼舵面控制力的尾座式无人机,外界风会引起螺旋桨滑流偏斜,减弱舵面控制力,严重影响了飞机在强风条件下的起降安全性以及精确定点着陆能力。
技术实现思路
1、为了解决现有垂直起降固定翼无人机载荷能力小、航时短且提升空间有限、垂直起降阶段控制能力弱等问题,本发明提供飞行控制能力强且具有长航时能力的可垂直起降混合动力尾座式无人机方案,以及相应的飞行控制方法。
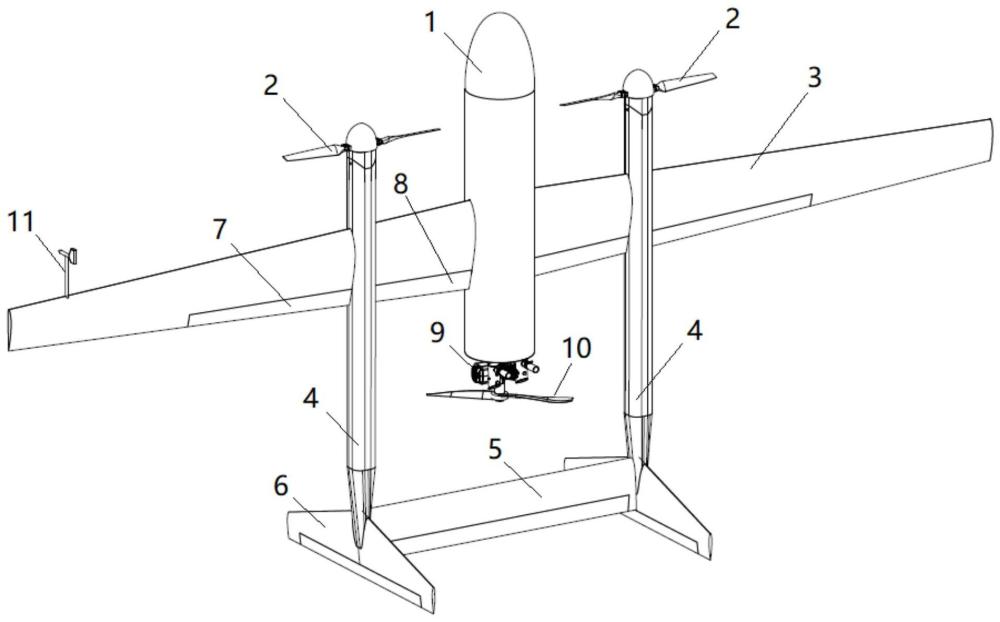
2、本发明的技术方案为:一种长航时尾座式混合动力垂直起降无人机,包括机身1、电动系统、机翼3、尾撑4、平尾5、垂尾6和油动系统;
3、所述机翼3对称安装在机身1中段两侧,其上有内侧襟副翼和外侧副翼;两个尾撑4沿机身轴线方向对称设置在机身两侧的机翼上;
4、所述尾撑4的尾部安装有垂尾6,头部安装有电动系统;
5、所述垂尾6平面平行于全机对称平面,且两片垂尾相对全机对称平面对称布置,且在地面上能够支撑无人机;垂尾6的尾部还设有方向舵;
6、所述平尾5位于尾撑4尾部,两端分别与两侧尾撑垂直连接,平尾与机翼3共面,平尾后端设有升降舵;
7、所述油动系统设置在机身1尾部;
8、平尾中间部分处于油动系统驱动的螺旋桨滑流中,能够提高平尾气动效力,并使升降舵在垂直起降阶段提供一定的控制力;
9、机翼3上的内侧襟副翼和外侧副翼处于电动系统的螺旋桨滑流中。
10、进一步地,还包括风标传感器11,所述风标传感器11安装在机翼的翼梢上,且靠近机身头部一侧,风标传感器11的旋转轴平行于机身轴线方向。
11、进一步地,所述电动系统包括电机和可折叠电驱动螺旋2;可折叠电驱动螺旋桨2在停转后能够向机身尾部方向折叠并贴附在尾撑4两侧,两侧的可折叠电驱动螺旋桨2旋转方向相反。
12、进一步地,所述油动系统包括活塞发动机9和油动螺旋桨10;活塞发动机9同轴安装在机身尾端,其上安装有油动螺旋桨10,旋转轴线与机身1纵向轴线平行。
13、进一步地,所述机翼为大展弦比机翼,采用中单翼布局。
14、进一步地,所述垂尾6上且沿尾撑轴线对称的上下两部分的截面形状为梯形。
15、一种长航时尾座式混合动力垂直起降无人机飞行控制方法,包括以下步骤:
16、步骤1、飞机起飞前,将无人机垂尾立于地面上,机身头部竖直向上;
17、步骤2、起飞时,启动电动系统和油动系统,电动系统产生向上拉力,油动系统产生向上推进力,驱动飞机离地起飞;
18、步骤3、上升过程中,电动系统的两个可折叠电驱动螺旋桨2同步向前或向后偏转,产生俯仰控制力;且处于油动系统驱动的螺旋桨尾流中的平尾5也产生俯仰控制力,进而控制飞机向前或向后移动;
19、差动调整两侧的电动系统螺旋桨的转速,产生拉力差,驱动飞机向左或向右倾斜,进而控制飞机向左或向右移动;
20、差动偏转两侧的电动系统螺旋桨,以及差动偏转处于电动系统螺旋桨滑流中的机翼襟副翼8及副翼7,产生绕机身轴线的控制力,控制飞机绕机身纵轴旋转;
21、步骤4、飞机起飞至安全高度后,操纵两侧的电动系统螺旋桨同步向前偏转,飞机产生低头力矩,飞机低头同时加速,飞机水平平稳飞行;
22、当飞行速度达到设定值后,电动系统停转,桨叶旋转向后折叠并贴合在尾撑两侧,飞机在油动系统的驱动下巡航飞行;
23、步骤5、飞机垂直着陆时,启动电动系统,并缓慢减小电机转速调节电动系统螺旋桨的拉力,控制飞机缓慢下降;
24、按照步骤3飞机姿态调整控制方式,控制飞机前后或横向移动至指定地点着陆。
25、进一步地,还包括抗风扰的控制步骤,具体为:
26、在垂直起降阶段,风标传感器11的风标偏转至与风的来向一致的方向;
27、当风标指示方向与机翼3不平行时,控制飞机进行偏转,使机翼3与风标指示方向平行。
28、本发明的有益效果是:
29、1、本发明动力系统包括位于尾撑前端的电动系统和位于机身尾端的活塞发动机两套动力系统,在时间短且所需功率大的垂直起降阶段,电动系统与活塞发动机一起提供垂直起降所需的动力,充分发挥了电机功率重量比高的优点,减小全机动力系统重量,同时在短时间的垂直起降阶段,飞机无需背负大重量的驱动电池;此外,电机及电动螺旋桨重量轻,进行偏转时偏转机构重量轻;
30、在巡航飞行阶段,驱动电机停转,由尾部活塞发动机及其驱动的螺旋桨驱动飞机前飞,活塞动力以及螺旋桨可以按巡航状态最佳来进行选择和设计而无需兼顾垂直起降状态,能够有效减小巡航状态的耗油率。
31、2、本发明中采用大展弦比机翼,在巡航飞行状态下具有升阻比大的优点;机翼上设有内侧襟副翼和外侧副翼,平尾后端有升降舵,垂尾后端有方向舵,用于飞机平飞阶段的飞行控制,平尾中间部分处于尾部活塞发动机驱动的螺旋桨滑流中,一方面可提高平尾气动效力,另一方面可使升降舵在垂直起降阶段提供一定的控制力;尾撑前端安装的两副电驱动螺旋桨旋转方向相反,且均为可折叠式,在不转动时可贴附在尾撑前端,减小飞行阻力。
32、3、相比于同样起飞重量的只采用活塞发动机的驱动的尾座式无人机,其发动机一般为大于275cc排量,最大功率大于16kw,重量达到8kg以上,而本实施例,两个驱动电机的重量约为1.3kg,电池重量约为2kg,排量120cc的活塞发动机9的重量约为3.5kg,动力系统总重量为6.8kg,相比纯活塞动力驱动的尾座式无人机,动力系统总重量减小15%以上,减小的动力系统重量转变为燃油,大大提升了无人机的续航时间,最大续航时间达到12小时以上。
33、4、本发明中在机翼稍部安装有风标传感器,用于测量垂直起降阶段外界风相对机体的来流方向,控制机翼调整至受干扰小的与风向平行的状态,从而提高尾座式无人机在强风条件下的起降安全性及精准着陆能力。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223137.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表