一种电动垂直起降飞行器的倾转机构
- 国知局
- 2024-08-01 06:19:26
本发明涉及电动垂直起降飞行器结构设计领域,具体为一种电动垂直起降飞行器的倾转机构。
背景技术:
1、对于固定翼飞行器来说,飞行速度高,飞行距离远,但对于起降跑道有一定要求;对于多旋翼飞行器来说,能够垂直起降和悬停,摆脱了起降跑道的限制,但是受限于速度和航程。电动垂直起降(evtol)飞行器既避免了固定翼飞行器对于起降跑道的需求,又弥补了旋翼飞行器速度慢和航程短的问题。电动垂直起降飞行器拥有广阔的应用前景。
2、电动垂直起降飞行器的倾转机构分为倾转机翼和倾转旋翼两类,倾转机翼类的飞行器,其在过渡阶段旋翼效率低,对于倾转机构要求负载更大,结构更加复杂,设计更加困难;倾转旋翼类的飞行器,倾转机构设计简单,但是一般只能使用在翼梢部位。本发明的倾转机构可以沿机翼展向任意部位设置,从而增加了动力个数,增加了垂直起降效率。
3、2024政府工作报告指出积极培育新兴产业和未来产业,积极打造低空经济新增长引擎。电动垂直起降飞行器适于城市内飞行和城市间通勤交通,是国内外航空业追逐的新的产业形态。同时,电动垂直起降飞行器是未来城市立体交通生态系统的基础,是2035年我国新一代交通体系的有利支撑,也是我国跨过传统通航直接发展新通航的希望。
技术实现思路
1、针对现有技术的不足,本发明旨在提供一种电动垂直起降飞行器的倾转机构,具有该倾转机构的飞行器在有机场的地区,可以常规起降;在跑道条件不足的情况下,可以垂直起降。
2、本发明通过如下技术方案实现。
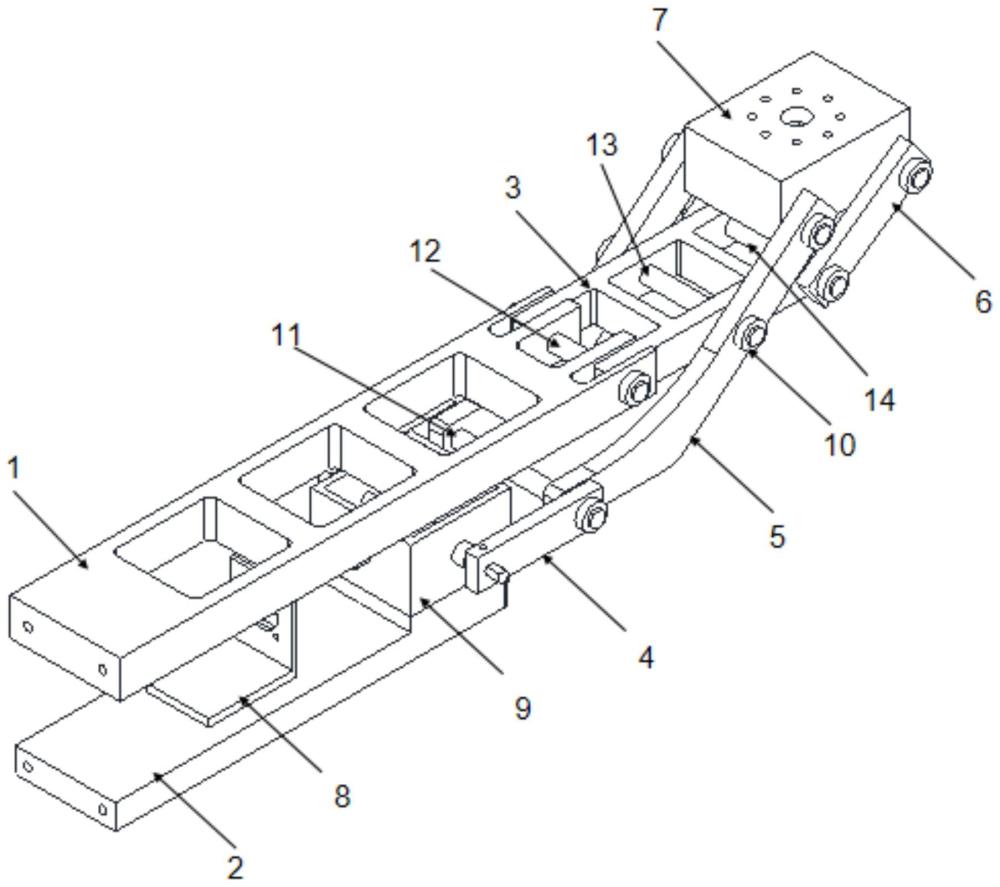
3、一种电动垂直起降飞行器的倾转机构,包括上固定支臂、下固定支臂、电机座,上固定支臂和下固定支臂固支于飞行器短舱内,下固定支臂上设置有动力机构,动力机构通过传动机构与电机座连接,控制动力机构的输出带动电机座倾转;
4、所述传动机构包括上活动支臂、下活动支臂、支撑直臂、支撑弯臂,所述上活动支臂的一端与上固定支臂转动连接,活动支臂的另一端与支撑直臂的一端转动连接,支撑直臂的另一端与电机座前部转动连接,所述下活动支臂的一端与动力机构连接,下活动支臂的另一端与支撑弯臂的一端转动连接,支撑弯臂的另一端与电机座后部转动连接,支撑弯臂的中部与上活动支臂的中部转动连接,电机座受支撑直臂和支撑弯臂共同支撑;
5、动力机构驱动下活动支臂摆动,下活动支臂带动支撑弯臂动作,支撑弯臂带动上活动支臂动作,上活动支臂带动支撑直臂动作,最终带动电机座在支撑直臂和支撑弯臂的共同作用下倾转。
6、进一步,还包括齿轮箱,动力机构通过齿轮箱减速后与传动机构连接。
7、进一步,所述动力机构与齿轮箱通过联轴器连接传动。
8、进一步,齿轮箱有一根输入轴和两根输出轴,通过伞形齿轮相互啮合,以保证输出给右下活动支臂和左下活动支臂的扭矩等大等效。
9、进一步,还包括舵机支架,舵机支架设置在下固定支臂上,动力机构固定在舵机支架上,动力机构为舵机或电机。
10、进一步,所述下活动支臂包括对称设置在倾转机构两侧的右下活动支臂和左下活动支臂,支撑弯臂包括对称设置在倾转机构两侧的右支撑弯臂和左支撑弯臂,支撑直臂包括对称设置在倾转机构两侧的右支撑直臂和左支撑直臂,右下活动支臂和右支撑弯臂通过四号光轴连接,上固定支臂和上活动支臂通过三号光轴连接,上活动支臂和右支撑弯臂、左支撑弯臂通过二号光轴连接,上活动支臂和左支撑直臂、右支撑直臂通过一号光轴连接。
11、进一步,还包括止动环,止动环位于光轴两侧。
12、工作原理:
13、在垂直起飞阶段,倾转机构如图2所示,带有螺旋桨的电机呈现竖直状态,固定在电机座上。舵机支架上的舵机在通电情况下,会进行自锁,从而保证联轴器另一端的输入伞形齿轮不会转动,保证整个倾转机构处于自锁状态。此时电机启动,带动螺旋桨旋转产生升力,多个螺旋桨旋转产生的升力叠加,从而飞行器实现垂直起飞。
14、飞行器实现垂直起飞后,到达足够的高度,进入起飞过渡阶段,倾转机构如图4所示,倾转机构的舵机开始转动,舵机通过联轴器传动给齿轮箱的输入伞形齿轮,齿轮箱的输入伞形齿轮与输出伞形齿轮相互啮合,输出伞形齿轮转动,带动左右下活动支臂运动,左右下活动支臂与左右支撑弯臂通过四号光轴连接传动,左右支撑弯臂拉动上活动支臂绕三号光轴转动,上活动支臂也会绕二号光轴向下转动,从而进一步带动支撑弯臂和支撑直臂运动,使电机座转动到起飞过渡对应位置。当电机座转动到起飞过渡对应位置时,舵机停止转动,进入自锁状态,电机座的平面从垂直起飞阶段的水平位置转动到斜45度位置,此时螺旋桨产生向上向前的力,带动飞行器向上向前运动。
15、当飞行器在起飞过渡阶段积累足够的速度后,进入水平前飞阶段,倾转机构如图6所示,动力机构的舵机继续转动,舵机继续通过联轴器传动给齿轮箱的输入伞形齿轮,齿轮箱的输入伞形齿轮与输出伞形齿轮相互啮合,输出伞形齿轮继续转动,带动左右下活动支臂运动,左右下活动支臂与左右支撑弯臂通过四号光轴连接传动,左右支撑弯臂拉动上活动支臂绕三号光轴继续转动,上活动支臂也继续会绕二号光轴向下转动,从而进一步带动支撑弯臂和支撑直臂运动。经过一系列传动后,电机座的平面从起飞过渡阶段的斜45度位置转动到竖直状态,此时舵机停止转动,倾转机构进入自锁状态,电机带动螺旋桨向前旋转,水平前飞阶段的倾转完成。
16、当飞行器需要降落时,先由水平前飞阶段改变到降落过渡阶段,降落过渡状态可视为起飞过渡阶段的逆过程,也是由动力机构的舵机转动,带动齿轮箱传动,再带动一系列杆件运动,使倾转机构运动至降落过渡阶段位置,即电机转轴从水平改变至斜向上45度位置,此时飞行器速度逐渐减小,到达设计的降落过渡速度视为降落过渡阶段完成。此时飞行器再由降落过渡阶段改变到垂直降落阶段,垂直降落阶段可视为垂直起飞阶段的逆过程,也是由动力机构的舵机转动,带动齿轮箱传动,再带动一系列传动机构运动,使倾转机构运动至垂直降落阶段,即电机转轴从斜向上45度位置改变至垂直位置,此时电机转速逐渐减小,飞行器实现垂直降落。当飞行器降落地面后视为垂直降落阶段完成。
17、进一步,所述舵机支架上的舵机为倾转机构的动力输入,包括但不限于舵机、电机等。
18、进一步,所述齿轮箱为保证动力输入的扭矩足够,当动力输入扭矩足够大时,可以不使用齿轮箱而直接输出。
19、进一步,所述杆件通过光轴,绕光轴实现转动,也可采用轴承代替光轴,实现杆件的转动。
20、进一步,止动环位于光轴两侧,目的是对杆件进行限位,防止杆件轴向窜动。
21、进一步,所述螺旋桨通过电力驱动。
22、与现有技术相比,本发明的优点是:本发明相较于传统垂直起降飞行器的倾转机构使用场景更加广泛,使用位置更加灵活,可以应用于分布式电推进垂直起降飞行器上,充分利用分布式电推进飞机的滑流效应。本发明的倾转机构配合短舱可沿机翼展向布置,提升动力数量,提高垂直起降阶段效率,同时在巡航阶段,其多个沿机翼展向分布的螺旋桨,构成了分布式推进构型,充分利用滑流增生效果,提高巡航阶段的升力;倾转机构可以实现螺旋桨0-90度之间的倾转,减少了结构死重,提高飞行性能;倾转机构可以回收至短舱内,相较于复合翼飞行器的垂直起降装置,提升巡航阶段的气动效率;符合《绿色航空制造业发展纲要(2023-2035年)》的要求。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223298.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表