一种仿蜻蜓扑翼运动机构的制作方法
- 国知局
- 2024-08-01 06:19:18
本发明涉及运动机构,特别涉及一种仿蜻蜓扑翼运动机构,属于扑翼飞行器。
背景技术:
1、扑翼式微型飞行器主要以仿生鸟类和各种飞行昆虫进行设计为主,自然界中的蜻蜓为双扑翼布局提供了设计思路;自扑翼式微型飞行器提出以来,因其相对于固定翼式和旋翼式的微型飞行器,具有体积小、重量轻、隐蔽性和机动性强,且在低雷诺数环境下能够产生较大的升力的特点;因此,其在民用领域、军事侦察、环境勘测、灾害救援等军事领域具有良好的应用前景;为此,提出一种仿蜻蜓扑翼运动机构。
技术实现思路
1、有鉴于此,本发明提供一种仿蜻蜓扑翼运动机构,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本发明的技术方案是这样实现的:一种仿蜻蜓扑翼运动机构,包括距离调节组件、扑动调节组件、相位角调节组件和振幅调节组件;
3、所述距离调节组件包括底板、螺杆、第一齿轮和第二齿轮;所述螺杆的外侧壁安装于所述底板的底部,所述第一齿轮的一侧安装于所述螺杆的一端,所述第一齿轮的外侧壁啮合连接于第二齿轮的外侧壁;所述扑动调节组件安装于所述底板的顶部;所述相位角调节组件安装于所述扑动调节组件的一侧;所述振幅调节组件安装于所述扑动调节组件的顶部。
4、进一步优选的,所述扑动调节组件包括第一转轴、第三齿轮、第四齿轮、第五齿轮、第六齿轮、第一板体、第二板体、襟翼固定板、襟翼本体、第二转轴和第七齿轮;所述第一转轴一端的外侧壁固定连接于所述第四齿轮的一侧,所述第三齿轮的外侧壁啮合连接于第四齿轮的外侧壁,所述第一转轴远离第四齿轮一端的外侧壁固定连接于所述第七齿轮的内部。
5、进一步优选的,所述第七齿轮的外侧壁啮合连接于所述第五齿轮的外侧壁,所述第七齿轮的外侧壁啮合连接于所述第六齿轮的外侧壁,所述第二转轴的外侧壁固定连接于所述第五齿轮的内部,所述第二转轴的外侧壁固定连接于所述第六齿轮的内部。
6、进一步优选的,所述第二转轴一端的外侧壁安装有第一板体,所述第一板体的一侧固定连接于所述第二板体的一侧,所述第二板体的一侧铰接于所述襟翼固定板的一侧,所述襟翼固定板的底部固定连接于所述襟翼本体的顶部。
7、进一步优选的,所述相位角调节组件包括第八齿轮、第九齿轮、第三板体、第一连接杆、套筒和第二连接杆;所述第八齿轮的外侧壁啮合连接于所述第九齿轮的外侧壁,所述第九齿轮的内部固定连接于所述第二转轴的外侧壁。
8、进一步优选的,所述第三板体的一侧固定连接于所述第九齿轮的一侧,所述第三板体的一侧固定连接于所述第一连接杆的一端,所述第二转轴的一端安装有套筒。
9、进一步优选的,所述第二连接杆的一端固定连接于所述第九齿轮的一侧,所述第二连接杆远离第九齿轮的一端贯穿所述第一板体的一侧,所述第二连接杆的外侧壁固定连接于所述第一板体的内部。
10、进一步优选的,所述振幅调节组件包括摇臂、第三连接杆和安装孔;所述摇臂的一侧开设有安装孔,所述摇臂的一端固定连接于所述第三连接杆的一端,所述第三连接杆远离摇臂的一端安装于第一连接杆的内部。
11、本发明实施例由于采用以上技术方案,其具有以下优点:
12、本发明通过控制第二齿轮带动第一齿轮转动,使得蜗杆随之转动,从而可以进行前后襟翼本体的距离调节,通过电机带动第三齿轮转动,使得可以实现前后襟翼本体的扑动,从而可以实现前后襟翼本体以不同频率进行扑动,通过舵机带动第八齿轮转动,可以改变前后襟翼本体的相位角,从而可以实现前后襟翼本体以不同相位角运动,通过舵机带动摇臂转动,使得前后襟翼本体的振幅可以得到改变。
13、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
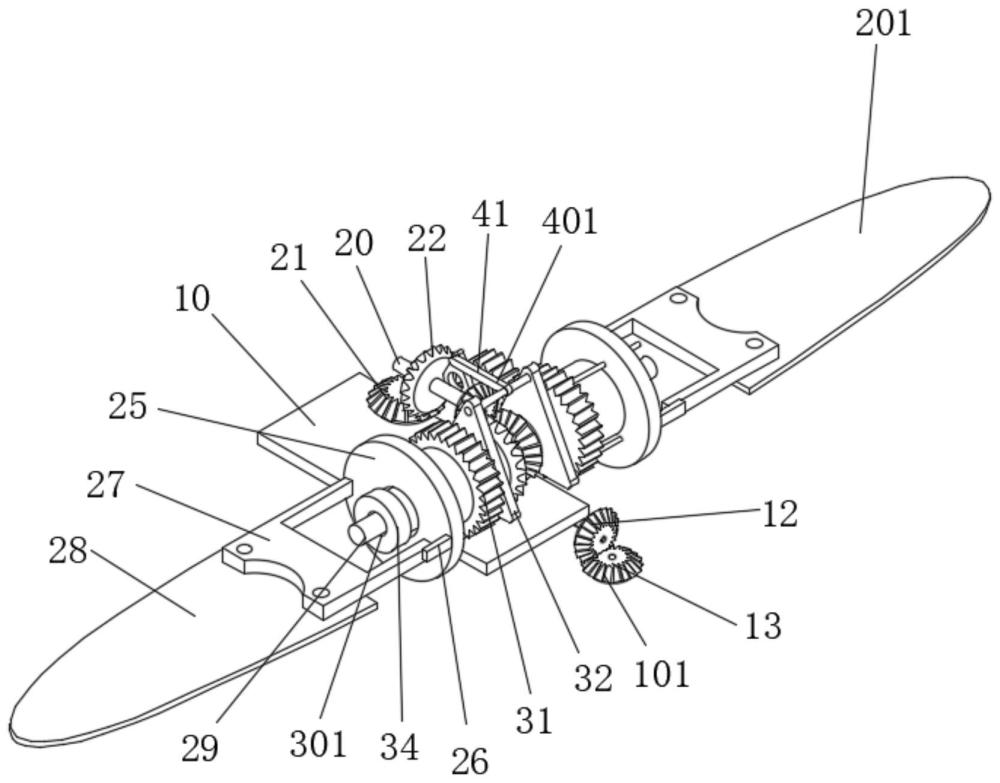
技术特征:1.一种仿蜻蜓扑翼运动机构,其特征在于:包括距离调节组件(101)、扑动调节组件(201)、相位角调节组件(301)和振幅调节组件(401);
2.根据权利要求1所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述扑动调节组件(201)包括第一转轴(20)、第三齿轮(21)、第四齿轮(22)、第五齿轮(23)、第六齿轮(24)、第一板体(25)、第二板体(26)、襟翼固定板(27)、襟翼本体(28)、第二转轴(29)和第七齿轮(210);所述第一转轴(20)一端的外侧壁固定连接于所述第四齿轮(22)的一侧,所述第三齿轮(21)的外侧壁啮合连接于第四齿轮(22)的外侧壁,所述第一转轴(20)远离第四齿轮(22)一端的外侧壁固定连接于所述第七齿轮(210)的内部。
3.根据权利要求2所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述第七齿轮(210)的外侧壁啮合连接于所述第五齿轮(23)的外侧壁,所述第七齿轮(210)的外侧壁啮合连接于所述第六齿轮(24)的外侧壁,所述第二转轴(29)的外侧壁固定连接于所述第五齿轮(23)的内部,所述第二转轴(29)的外侧壁固定连接于所述第六齿轮(24)的内部。
4.根据权利要求3所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述第二转轴(29)一端的外侧壁安装有第一板体(25),所述第一板体(25)的一侧固定连接于所述第二板体(26)的一侧,所述第二板体(26)的一侧铰接于所述襟翼固定板(27)的一侧,所述襟翼固定板(27)的底部固定连接于所述襟翼本体(28)的顶部。
5.根据权利要求2所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述相位角调节组件(301)包括第八齿轮(30)、第九齿轮(31)、第三板体(32)、第一连接杆(33)、套筒(34)和第二连接杆(35);所述第八齿轮(30)的外侧壁啮合连接于所述第九齿轮(31)的外侧壁,所述第九齿轮(31)的内部固定连接于所述第二转轴(29)的外侧壁。
6.根据权利要求5所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述第三板体(32)的一侧固定连接于所述第九齿轮(31)的一侧,所述第三板体(32)的一侧固定连接于所述第一连接杆(33)的一端,所述第二转轴(29)的一端安装有套筒(34)。
7.根据权利要求6所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述第二连接杆(35)的一端固定连接于所述第九齿轮(31)的一侧,所述第二连接杆(35)远离第九齿轮(31)的一端贯穿所述第一板体(25)的一侧,所述第二连接杆(35)的外侧壁固定连接于所述第一板体(25)的内部。
8.根据权利要求5所述的一种仿蜻蜓扑翼运动机构,其特征在于:所述振幅调节组件(401)包括摇臂(40)、第三连接杆(41)和安装孔(42);所述摇臂(40)的一侧开设有安装孔(42),所述摇臂(40)的一端固定连接于所述第三连接杆(41)的一端,所述第三连接杆(41)远离摇臂(40)的一端安装于第一连接杆(33)的内部。
技术总结本发明提供了一种仿蜻蜓扑翼运动机构,包括距离调节组件、扑动调节组件、相位角调节组件和振幅调节组件;所述距离调节组件包括底板、螺杆、第一齿轮和第二齿轮;所述螺杆的外侧壁安装于所述底板的底部,所述第一齿轮的一侧安装于所述螺杆的一端,本发明通过控制第二齿轮带动第一齿轮转动,使得蜗杆随之转动,从而可以进行前后襟翼本体的距离调节,通过电机带动第三齿轮转动,使得可以实现前后襟翼本体的扑动,从而可以实现前后襟翼本体以不同频率进行扑动,通过舵机带动第八齿轮转动,可以改变前后襟翼本体的相位角,从而可以实现前后襟翼本体以不同相位角运动,通过舵机带动摇臂转动,使得前后襟翼本体的振幅可以得到改变。技术研发人员:荣臻,潘鑫豪,于静受保护的技术使用者:浣江实验室技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/223286.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表