一种定点刹车控制方法及系统
- 国知局
- 2024-08-01 06:19:11
本发明涉及飞机刹车系统,具体涉及一种定点刹车控制方法及系统。
背景技术:
1、飞机起飞和着陆阶段是飞行过程中关系到飞行安全的重要阶段。飞机防滑刹车系统是一个典型的非线性系统,其工作环境受到飞机速度变化、地面摩擦力以及跑道环境状况等多种因素影响。为了保证飞机飞行在恶劣工况下的安全性,以及降低时间成本,提高起降高峰时间段的经济效益,需要飞机能够在驶入脱离跑道时降低至目标速度并顺利脱离,从而在保证安全完成刹车过程的同时减小跑道占用时间。
2、现代飞机的防滑刹车系统为飞机的安全着陆提供了有力保障,在飞机着陆后的减速阶段消耗机体动能,在完成制动过程的同时,防止出现机轮抱死并避免过度磨损。除此之外,飞机防滑刹车系统还要配合前轮及其他系统实现机体转向、停机等功能,对于飞机的起降安全至关重要。
3、在机轮不出现深度打滑或抱死的情况下,飞机防滑刹车系统通过控制刹车力矩,尽可能提高地面结合系数利用率,以此提高刹车效率,使飞机在尽可能短的距离内降至一定速度或者停止。刹车效率是反应刹车性能的关键性指标,其具体定义为刹车过程中实际使用的结合系数积分与理想结合系数包络积分的比值。
4、防滑控制算法的设计通常与系统的硬件结构相关,常见的调制控制方法是根据机轮的滑移状态调整刹车压力,使得机轮的滑移状态尽可能保持在刹车效率更高的状态。
5、其中,基于减速率的刹车控制方法根据轮速传感器的反馈信号和刹车压力信号计算出机轮减速率,与预设的减速率值进行比较得到控制信号,即生成一个目标减速率,再由电液伺服阀根据控制信号来调节刹车压力输出。
6、滑移状态的保持问题涉及到对滑移状态的辨识。道面寻优方法依靠建立不同跑道的数学模型,依据模型辨识飞机机轮的打滑程度,为高效的防滑刹车控制律设计提供基础。滑移率通常用来表征机轮与地面的相对运动状态,最佳滑移率对应着机轮与地面的结合力接近跑道所能提供的最大结合力。在不同跑道状态下最佳滑移率并不相同,但滑移率随滑移速度的变化趋势相似,道面寻优通过找到不同跑道对应的最佳滑移率,将机轮工作点实时控制在距离最佳滑移率较近的范围,从而提高刹车效率。
7、压力偏调算法(press bias module,简称pbm)是目前广泛使用的基于减速率的刹车控制方法。其原理是生成一个参考速度代替飞行器速度,用参考速度与轮速的差产生的不同滑移阈值,建立不同的压力升降系数,通过不同的规则和阈值的设计保证机轮滑移状态保持在最优工作点附近。
8、对于现有的自动刹车系统而言,不同起降环境以及滑跑道面条件能够支持的最优减速率是未知的,同时飞机还受到来自系统内外的各种扰动,包括外界的顺、逆阵风,刹车盘力矩系统变化等干扰,其无法自动规划飞机滑跑过程,需要飞行员在着陆后根据经验判断当前的飞机状态,进而选择相应的飞机减速率,对跑道状态变化的适应性较差。
技术实现思路
1、本发明的目的是提供一种定点刹车控制方法及系统,以解决现有技术中的不足,它能够以安全性和经济性为原则,根据飞机在跑道上的位置、速度以及道面条件,自动规划飞机道面滑跑过程,在尽可能获得更优减速率的同时,对目标速度和目标位置进行规划,同时抵抗来自系统内外的顺、逆阵风,刹车盘力矩系统变化等扰动,最终实现定点刹车,并保证刹车过程的安全性、舒适性和足够的经济效益。
2、本发明提供了一种定点刹车控制方法,其中,包括以下步骤:
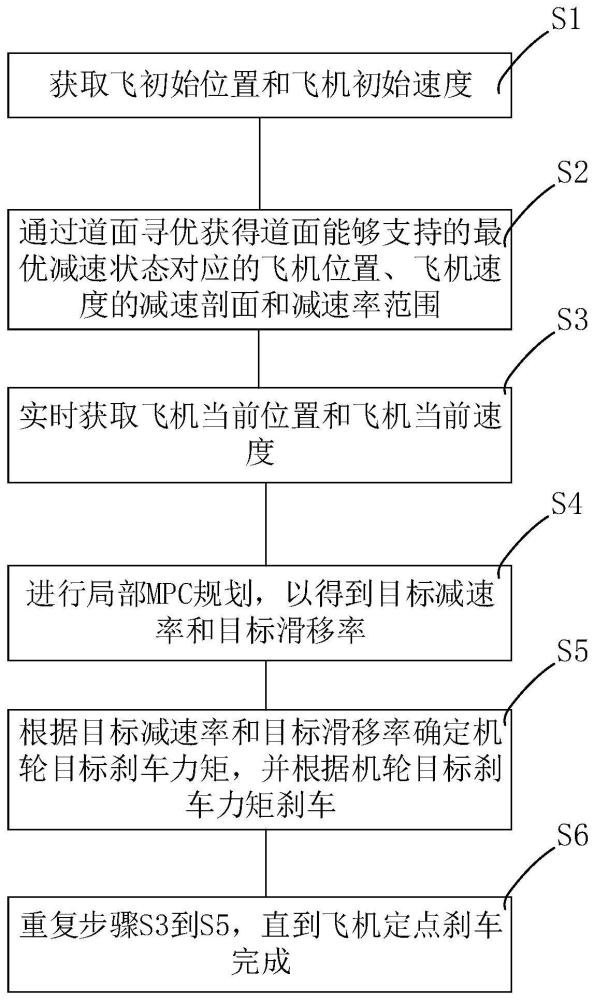
3、s1,获取飞初始位置和飞机初始速度;
4、s2,通过道面寻优获得道面能够支持的最优减速状态对应的飞机位置、飞机速度的减速剖面和减速率范围;
5、s3,实时获取飞机当前位置和飞机当前速度;
6、s4,进行局部mpc规划,以得到目标减速率和目标滑移率;
7、s5,根据目标减速率和目标滑移率确定机轮目标刹车力矩,并根据机轮目标刹车力矩刹车;
8、s6,重复步骤s3到s5,直到飞机定点刹车完成。
9、如上所述的定点刹车控制方法,其中,可选的是,步骤s4中,进行局部mpc规划为,将步骤s1-s3获取的结果输入预先设定局部优化模型中。
10、如上所述的定点刹车控制方法,其中,可选的是,局部优化模型中,目标评价函数为:
11、
12、其中,np为预测步长,nc为控制步长,yref为由道路规划模块得到的全程位置-速度参考值,δu(k+i)=u(k+i)-u(k)为控制输出增量,qa为系统输出量的权重系数矩阵,r1为系统控制量的权重系数矩阵,r2为控制增量的权重系数矩阵。
13、如上所述的定点刹车控制方法,其中,可选的是,在每个控制周期内,局部优化问题为:
14、
15、s.t.xa(k+1)=aaxa(k)+bau(k)
16、0≤|ua(k+i)|≤uamax;
17、其中,uamax为道面所能支持的最大减速率,aa和ba均为状态矩阵。
18、如上所述的定点刹车控制方法,其中,可选的是,道面所能支持的最大减速率由寻优得到的减速率计算得到,其公式为:
19、
20、其中,σasafe<1,为飞机减速率安全裕量,为寻优得到的机轮减速率,rw为机轮半径。
21、如上所述的定点刹车控制方法,其中,可选的是,在步骤s4中,以最优状态约束下获得尽可能高的地面结合力利用率和刹车效率为目标。
22、本发明还提出了一种定点刹车控制系统,其中,包括道路规划模块、局部mpc规划控制器和下层滑移状态控制器;
23、所述道路规划模块用于获取初始位置和飞机初始速度,并进行道路规划,以得到道面能够支持的最优减速状态对应的飞机位置、飞机速度的减速剖面和减速率范围;
24、所述局部mpc规划控制器实时获取所述道路规划模块的计算结果,并进行局部mpc规划,以得到目标减速率和目标滑移率;
25、所述下层滑移状态控制器实时获取局部mpc规划的输出结果,并计算出机轮目标刹车力矩,以控制制动系统按机轮目标刹车力矩刹车;所述下层滑移状态控制器还用于获取控制系统的输出信号,以实现闭环控制。
26、如上所述的定点刹车控制系统,其中,可选的是,所述局部mpc规划控制器实时获取飞机当前位置和飞机当前速度和飞机当前减速率,以通过局部mpc规划控制器实现闭环控制。
27、如上所述的定点刹车控制系统,其中,可选的是,所述局部mpc规划控制器根据当前反馈的飞机实际状态生成符合最优状态约束的目标滑移状态,以供下层滑移控制器以此为目标,实现对飞机机轮滑移状态的闭环控制。
28、如上所述的定点刹车控制系统,其中,可选的是,所述道路规划模块包括道面寻优单元。
29、与现有技术相比,本发明提出的定点刹车控制方法以安全性和经济性为原则,根据飞机在跑道上的位置、速度以及道面条件,自动规划飞机道面滑跑过程,在尽可能获得更优减速率的同时,对目标速度和目标位置进行规划,同时抵抗来自系统内外的顺、逆阵风,刹车盘力矩系统变化等扰动,最终实现定点刹车,并保证刹车过程的安全性、舒适性和足够的经济效益。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223280.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表