基于仿生柔顺机构的视觉拍摄装置及飞行拍摄系统
- 国知局
- 2024-08-01 06:19:05
本发明涉及机器视觉,更具体地,涉及一种基于仿生柔顺机构的视觉拍摄装置及飞行拍摄系统。
背景技术:
1、机器视觉是指配置视觉测量或传感的检测技术,目的是让机器测量、识别或跟踪环境中的特定对象,在自动化生产中,常被用于缺陷检测、目标识别和物料校准及定位等任务。传统的机器视觉拍摄系统,以静态(单步)拍摄为主,即相机与被测对象在拍摄时保持相对静止;由于拍摄效率低,飞行拍摄应运而生,飞行拍摄是机器视觉中的一个分支,在相机与被测对象之间存在相对运动的情况下进行拍摄。
2、因相机在拍摄时处于飞行状态,与被测对象之间存在相对运动,因而容易产生运动模糊。多种扰动源综合下视觉系统的拍摄效果会产生离焦模糊,在飞行拍摄中对图像识别精度的影响则更大。然而,目前的飞行拍摄装置没有设置快速调焦机构,难以实时改善离焦模糊;对运动模糊也无特定的硬件或软件算法等补偿。诸如中国专利文献公开了一种机器视觉飞行系统,其利用齿轮机构将拾取头的升降运动转化为反射镜的伸缩往复运动,但是其系统中相机、光路与工件是固定的,若有校准误差或扰动,相机无法自适应,精度无法保证,不具备高精度和抗扰性能;再如中国专利文献公开了一种飞行拍摄控制方法及系统,根据预设飞拍位置和工件的运动,先后启动拍摄和拍摄所需光源,实现工件运动状态下的拍摄,其使用特定硬件配置和控制逻辑完成运动状态下的拍摄,但是其触发信号多,延迟处理影响会飞行拍摄精度,复杂的硬件堆叠增加系统的复杂性,单次触发无反馈无位置和无图像扰动抗干扰功能,不具备高精度和高效率。
3、因此,在飞行拍摄系统应用于精密电子制造技术领域时,飞行拍摄虽能提高拍摄效率,但精度较低,抗扰动性能欠佳。
技术实现思路
1、本发明的目的在于克服现有运动拍摄时发生扰动不易消除且调焦精度能力不足的问题,提供一种基于仿生柔顺机构的视觉拍摄装置及飞行拍摄系统。本发明的的调焦效率高,能够实现在飞行运动拍摄瞬间进行快速调焦的功能,且具备大行程、快速与高精度的调焦特性。
2、为解决上述技术问题,本发明采用的技术方案是:
3、一种基于仿生柔顺机构的视觉拍摄装置,包括:
4、压电驱动器,包括预紧端和输出端;
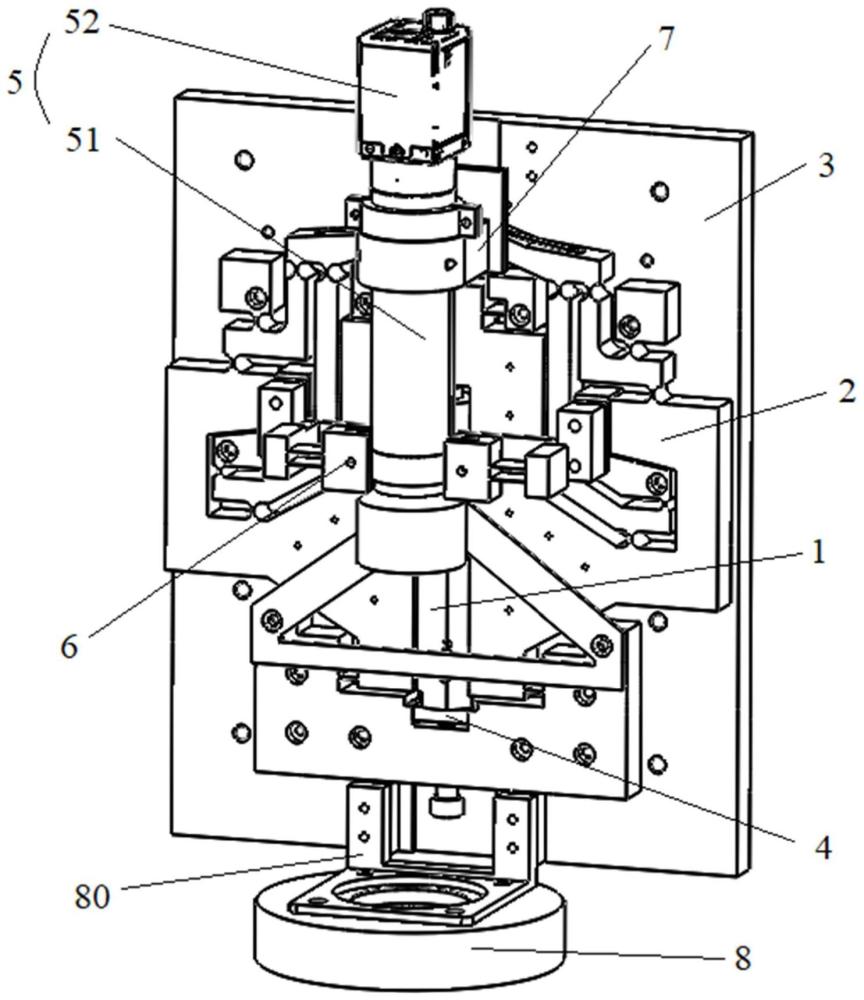
5、仿生柔顺机构,仿生柔顺机构包括相互铰接的固定部及仿生柔顺放大部,仿生柔顺放大部上分别设有驱动部和位移输出部,驱动部连接压电驱动器的输出端;
6、安装板,仿生柔顺机构通过固定部固定在安装板上,仿生柔顺放大部可在集成安装板上发生形变并传递位移;
7、预紧机构,预紧机构的一端抵接在预紧端上,预紧机构的另一端连接在固定部上且可用于调节施加在预紧端上的抵接力;
8、机器视觉拍摄组件,机器视觉拍摄组件包括工业相机,以及安装在工业相机上的镜头,工业相机的一端通过支承机构连接在固定部上,工业相机的另一端通过传动件抵接位移输出部并由位移输出部带动发生微位移;
9、控制器,控制器分别连接压电驱动器及工业相机。
10、在上述技术方案中,本发明通过设置仿生柔顺机构,能够解决传统刚性运动机构的拍摄装置其调焦精度不高,运动学性能不足与动力学性能欠佳的问题,本发明利用仿生柔顺机构连接机器视觉拍摄组件,基于仿生柔顺机构的运动传递具有无摩擦、免润滑的特性,通过控制器控制压电驱动器驱动仿生柔顺机构进行位移放大传递,带动机器视觉拍摄组件在拍摄对焦方向上所进行往复微动位移,从而使工业相机在拍摄时实现离焦补偿,能够以高速率寻靶调焦,应用于精密电路板、芯片等高精度零件的对焦拍摄检测设备上时,能够很有效的提高调焦精度,且满足μm级别的位移调焦,从而大大提高此类飞行拍摄装置或检测装备的性能和效率。本发明的的调焦效率高,能够实现在飞行运动拍摄瞬间进行快速调焦的功能,且具备大行程、快速与高精度的调焦特性,补偿因工业相机飞行运动而产生的运动模糊,改善多种扰动源综合作用下所产生的离焦模糊,在提升靶标识别效率的同时兼顾提高识别精度。
11、此外,还需说明的是,上述技术方案中,设置预紧机构能够传递预紧力给压电驱动器,对压电驱动器的预紧端施加初始预紧力,且初始预紧力可控,可便于本发明的柔顺控制装置适应更多的应用领域,同时能够避免产生侧向力危及压电驱动器的安全隐患;将载荷较大的工业相机和镜头通过支承机构连接在固定部上,固定部再将载荷传递至安装板上,这样可以把重量载荷转移,不影响仿生柔顺放大部的位移传递和压电驱动器的实用安全,消除偏执力矩,有效解决压电驱动过程中由于仿生柔顺放大部一侧受载荷过大无法保持位移水平传递,从而可能驱动端连接的压电驱动器损坏的问题,通过先固定载荷再传递输出,载荷与仿生柔顺放大部分开间接传递的方式可以有效避免仿生柔顺放大部的位移输出部末端承载较大载荷时动力学方向出现摇摆的问题;控制器内配设有用于调节压电驱动器位移输出量的调焦控制算法,其调焦控制算法可基于工业相机在发生位移的方向上的输出量、仿生柔顺放大部的放大比及仿生柔顺放大部的柔性传递参数等进行综合控制。
12、进一步地,还包括光源,光源通过转接件连接在安装板上,光源的照明光路覆盖工业相机的拍摄范围。
13、进一步地,光源连接控制器,控制器内还可配设有光源控制算法,协同仿生柔顺机构对工业相机的调焦过程进行光源控制,实现更好的拍摄清晰度和拍摄效果。
14、进一步地,仿生柔顺放大部包括结构相同且对称设置的第一仿袋鼠下肢柔性机构和第二仿袋鼠下肢柔性机构,第一仿袋鼠下肢柔性机构和第二仿袋鼠下肢柔性机构的两端分别为大腿端和脚掌端;
15、进一步地,第一仿袋鼠下肢柔性机构和第二仿袋鼠下肢柔性机构的大腿端通过柔性连杆对称连接,驱动部位于柔性连杆的对称轴上;
16、进一步地,第一仿袋鼠下肢柔性机构和第二仿袋鼠下肢柔性机构的脚掌端通过连接头相互连接,位移输出部位于连接头的对称轴上;传动件与连接头在发生位移的方向上相互抵接,传动件与连接头在垂直于位移平面的方向上相互活动。
17、需要说明的是,本发明选择的仿生对象为袋鼠下肢结构,并能够模仿袋鼠下肢跳跃过程时的动力传动机制,这是基于袋鼠的跳跃运动的跳跃频率高、竖直跳跃高和水平跨度大的特点进行优选仿生的。
18、进一步地,支承机构的一端对称连接在工业相机两侧,支承机构的另一端支承连接在固定部上且用于承载视觉拍摄组件的全部重量;传动件包括套设在工业相机外周的定位环,以及连接在定位环上的抵接块,抵接块在垂直于位移平面的方向上活动插设在连接头上,连接头上开设有对应的避空孔,抵接块在发生位移的方向上与连接头相抵接。
19、进一步的,工业相机的外部还可设有用于保护工业相机的紧固套,支承机构通过连接紧固套与工业相机间接固定。
20、进一步地,第一仿袋鼠下肢柔性机构和第二仿袋鼠下肢柔性机构均包括由大腿端至脚掌端依次连接的仿股骨柔性梁、仿胫骨柔性梁、仿跟腱柔性梁和仿脚掌柔性梁;
21、进一步地,仿股骨柔性梁通过仿髋关节柔性铰链分别连接柔性连杆和固定部,仿胫骨柔性梁和仿股骨柔性梁之间通过仿膝关节柔性铰链相互连接,仿脚掌柔性梁分别与仿胫骨柔性梁和仿跟腱柔性梁之间通过仿踝关节柔性铰链相互连接,仿跟腱柔性梁通过仿跟腱柔性铰链分别连接柔性连杆和固定部。
22、需要说明的是,综合袋鼠跳跃阶段分析和袋鼠跳跃时的腿部运动,一路肌肉骨骼运动为大腿肌肉的收缩与舒张,主要是臀肌和膝关节屈肌收缩与舒张,驱动大腿骨前后摆动,再将位移传递到胫骨摆动,最后传递到脚掌的踝关节与胫骨运动同向;另一路为小腿肌肉的收缩与舒张,主要是换关节伸肌拉伸长跟腱,长跟腱连接脚掌骨末端,带动掌骨末端朝踝关节运动相反的方向运动,因此袋鼠的跳跃机制是基于差分杠杆的跳跃机制,与传统有固定端的杠杆机构相比,在相同尺寸下差分杠杆的放大比更大。因此,受袋鼠的运动机理启发,本发明仿髋关节柔性铰链和仿股骨柔性梁成大腿运动,仿股骨柔性梁的运动通过仿膝关节柔性铰链传递到仿胫骨柔性梁构成小腿运动,仿跟腱柔性铰链与仿跟腱柔性梁构成跟腱运动,跟腱运动用过仿踝关节柔性铰链传递到仿脚掌柔性梁,同时小腿运动也通过另一个仿踝关节柔性铰链传递到仿脚掌柔性梁,两个仿踝关节柔性铰链向相反方向运动,构成仿脚掌柔性梁的差动运动;仿脚底跟腱薄壁梁设置于仿脚掌柔性梁下面,整体采用对称布置,以减小相机连接头的耦合位移。
23、进一步地,通过模拟袋鼠的腿部比例,使仿股骨柔性梁、仿胫骨柔性梁、仿脚掌柔性梁比例约为0.23:0.46:0.31。
24、进一步地,通过模拟髋关节膝关节、踝关节与跟腱律动所需肌肉中各肌肉驱动力占总驱动力的权重因子,调节腿部各个铰链处的刚度大小比值。
25、进一步地,柔性连杆包括一体成型且对称设置的中轴柔性连杆和外周柔性连杆,中轴柔性连杆位于两个仿股骨柔性梁之间,外周柔性连杆位于两个仿股骨柔性梁和仿胫骨柔性梁的外侧,驱动部位于中轴柔性连杆的对称轴上,中轴柔性连杆的对称轴线上还开设有用于压电驱动器同轴放置的安置槽口;
26、进一步地,固定部包括分体设置的中轴固定部、腿位固定部和跟腱位固定部,中轴固定部包括设于中轴柔性连杆两端且均通过柔性铰链相互连接的第一中轴固定部和第二中轴固定部;预紧机构连接在第一中轴固定部上,第二中轴固定部对称连接在中轴柔性连杆的对称轴的两侧;
27、进一步地,腿位固定部位于仿股骨柔性梁和外周柔性连杆之间,仿髋关节柔性铰链分别连接仿股骨柔性梁和外周柔性连杆;跟腱位固定部位于仿跟腱柔性梁的外侧,仿跟腱柔性铰链分别连接仿跟腱柔性梁和跟腱位固定部。
28、进一步的,中轴固定部与中轴柔性连杆之间连接的柔性铰链为直梁型柔性铰链,仿髋关节柔性铰链、仿踝关节柔性铰链、仿膝关节柔性铰链、仿跟腱柔性铰链均采用直圆型柔性铰链,可用于提高仿生柔顺机构的固有频率。
29、进一步地,安置槽口的上方还设置有连接在固定部上的压电保护支架,压电保护支架位于机器视觉拍摄组件和柔性连杆之间,压电保护支架将压电驱动器限位在安置槽口中也保护其不易损坏。
30、进一步地,预紧机构包括同轴依次相互抵接的预紧块、预紧钢珠和预紧螺钉,预紧螺钉与第一中轴固定部螺纹连接,预紧块与位于安置槽口中的压电驱动器的预紧端相互抵接。预紧螺钉在第一中轴固定部的螺纹孔中的相对运动能够对压电驱动器的预紧端施加不同程度的压力,对压电驱动器施加初始预紧力,且初始预紧力可控;同时,通过设置预紧螺钉的这种方式在实现预紧目的同时,能够避免产生侧向力危及压电驱动器的安全隐患。
31、进一步地,仿脚掌柔性梁的脚掌底部位置还设有阻尼件。阻尼件包括但不限于压电片或阻尼材料。由于压电驱动器带动仿生柔顺机构发生高频率的位移变化,增加压电片或阻尼材料在仿脚掌柔性梁的脚掌底部位置,能够用于减小高频率的位移传动过程的震动,提高仿生柔顺机构的运动学性能。
32、本发明还提供一种飞行拍摄系统,包括运动检测平台,架设在运动检测平台上方的拍摄运动导轨,设于拍摄运动导轨上的如上的基于仿生柔顺机构的机器视觉拍摄装置,以及连接并用于驱动机器视觉拍摄装置在拍摄运动导轨上往复运动的驱动装置,控制器连接并控制驱动装置;基于仿生柔顺机构的机器视觉拍摄装置中仿生柔顺机构发生位移的方向垂直于运动检测平台;
33、进一步地,运动检测平台包括用于放置待测件的对位平台,连接对位平台且驱动对位平台实现z轴高度调整的z轴运动组件,以及连接对位平台且驱动对位平台实现x轴位置调整的x轴运动组件,拍摄运动导轨的导向轴线空间垂直于x轴运动组件的运动轴线,控制器连接并控制z轴运动组件和x轴运动组件。
34、进一步地,z轴运动组件和x轴运动组件上均包括导向滑轨及驱动电机以实现位置导向和位置调整。
35、与现有技术相比,本发明的有益效果是:
36、(1)本发明通过设置仿生柔顺机构,能够解决传统刚性运动机构的拍摄装置其调焦精度不高,运动学性能不足与动力学性能欠佳的问题,本发明利用仿生柔顺机构连接机器视觉拍摄组件,基于仿生柔顺机构的运动传递具有无摩擦、免润滑的特性,通过控制器控制压电驱动器驱动仿生柔顺机构进行位移放大传递,带动机器视觉拍摄组件在拍摄对焦方向上所进行往复微动位移,从而使工业相机在拍摄时实现离焦补偿,能够以高速率寻靶调焦,应用于精密电路板、芯片等高精度零件的对焦拍摄检测设备上时,能够很有效的提高调焦精度,且满足μm级别的位移调焦,从而大大提高此类飞行拍摄装置或检测装备的性能和效率。
37、(2)本发明的的调焦效率高,能够实现在飞行运动拍摄瞬间进行快速调焦的功能,且具备大行程、快速与高精度的调焦特性,补偿因工业相机飞行运动而产生的运动模糊,改善多种扰动源综合作用下所产生的离焦模糊,在提升靶标识别效率的同时兼顾提高识别精度。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223272.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。