一种基于无人机的水下ROV检测系统
- 国知局
- 2024-08-01 06:16:25
本技术涉及水下探测领域,特别是一种基于无人机的水下rov检测系统。
背景技术:
1、无人机作为一种新型无人化智能载具,具有高度的灵活性和较强的环境适应性,而且可以在较为广阔的区域进行飞行,因此能够胜任许多复杂环境和恶劣条件下的探测和侦察任务。其最大的特点是能够代替人进行工作,降低人力劳动成本以及保障了操作人员的安全。
2、有缆无人遥控潜水器 (rov)作为一种高效灵活的机器,主要用于水文探测、水下探测侦测及反潜反鱼雷等场景。目前,可靠的有缆rov通常是有光缆连接控制的,因此其活动范围收到一定限制,只能在光缆长度范围内进行工作。
3、结合无人机和有缆rov各自的特点,研究形成一种无人机+rov的检测系统,已经成为了水下探测领域的最新热点。现有的方式是在无人机下方设置一个能够打开和关闭的固定笼,将rov置于笼中,这样便可以利用无人机将rov从空中运送至需要勘测的水域,探测结束后,rov重新回到笼内,无人机将其带回作业船只上,操作起来十分方便。
4、但是上述系统在使用过程中仍然存在一定的问题,其中一个较为明显的问题是:不论两次探测的水域之间距离多远,都只能采用回收rov并由无人机带动其运动至下一水域的方式进行移动,工作效率相对较低;
5、同时上述的传统系统,rov机器人在固定笼中无法固定,一旦在无人机飞行的过程中发生晃动、颠簸等情况,rov机器人便会与固定笼之间发生刚性碰撞,容易造成rov的损伤,影响其使用寿命和检测效果。
6、因此现在需要一种能够解决上述问题的方法或装置。
技术实现思路
1、本实用新型是为了解决现有技术所存在的上述不足,提出一种结构简单,设计巧妙,布局合理,能够由rov驱动无人机整体实现短途航行的基于无人机的水下rov检测系统。
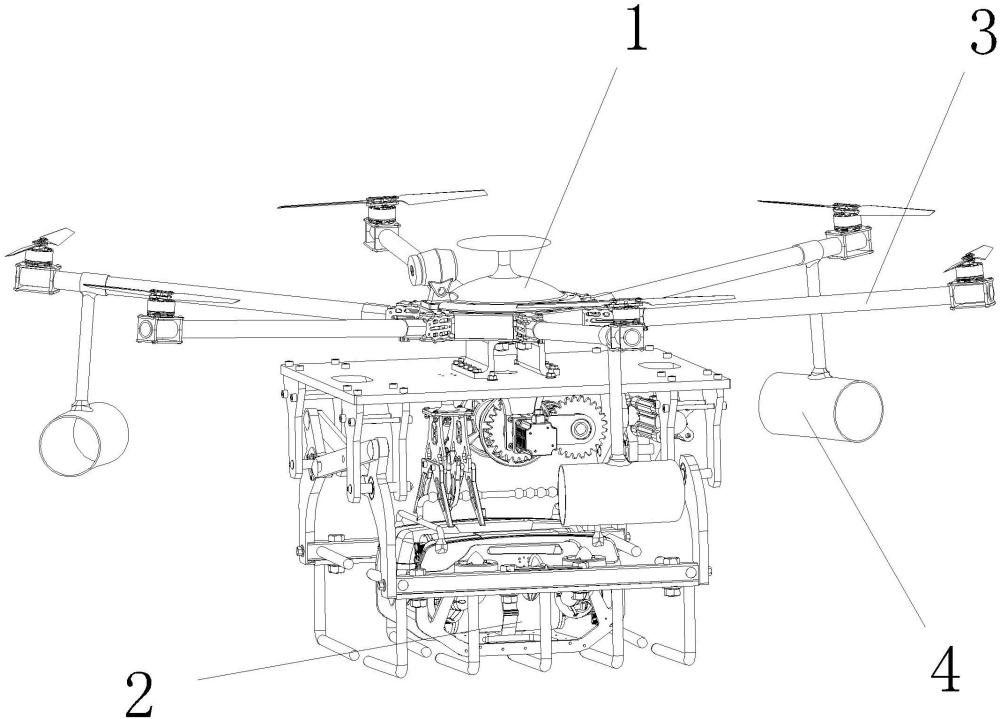
2、本实用新型的技术解决方案是:一种基于无人机的水下rov检测系统,包括无人机1和rov机器人2,其特征在于:所述无人机1的螺旋桨支杆3上连接有多个在圆周方向上均匀分布的固定套4,所有的固定套4共同支撑救生圈,无人机1的下方设置有连接板5,连接板5的两端设置有固定笼驱动机构6,所述固定笼驱动机构6上连接有固定笼,所述的固定笼由左固定笼7和右固定笼8两部分组成,这两部分均通过固定笼驱动机构6进行驱动,在连接板5底端面的中心处还设置有线缆收放机构9,所述连接板5的底端面上还设置有固定夹爪10,在rov机器人的顶部设置有与所述固定夹爪10相匹配的连接架11,
3、所述连接板5上还设置有定位架,所述定位架上设置有一对对称分布的定位机构13,所述定位机构13与rov机器人2端部设置的定位孔相匹配。
4、所述线缆收放机构9包括设置在连接板5底端面上的支撑座14,支撑座14上转动支撑有转轴,所述转轴通过收放电机进行驱动,同时所述转轴上缠绕线缆,线缆的一端与转轴固定连接,另一端与rov机器人固定连接。
5、所述固定夹爪10包括与连接板5固定连接的夹爪支撑架15,夹爪支撑架15的下部转动支撑有两个对称分布的夹爪体16,夹爪体16的内侧设置有弧形齿17,两个夹爪体16上的弧形齿17相互啮合,在夹爪支撑架15上还转动连接有夹爪驱动缸18,所述夹爪驱动缸18的工作端与一个夹爪体16的顶端转动连接,在夹爪支撑架15的前后两侧还均连接有导向架19,所述导向架19整体呈人字形,
6、所述连接架11上设置有多个等间距分布的限位块24,相邻限位块24之间的间隙与固定夹爪10相匹配。
7、所述定位机构13包括直接与定位架固定连接的固定板20,固定板20上连接有弹性杆21,弹性杆21的末端设置有多个在圆周方向上均匀分布的弹性支杆22,所述弹性支杆22的端部连接有盾形定位片23,所有的盾形定位片23共同合围形成圆锥状的定位件,所述定位件与rov机器人2端部的定位孔相匹配。
8、本实用新型同现有技术相比,具有如下优点:
9、本种结构形式的基于无人机的水下rov检测系统,其结构简单,设计巧妙,布局合理,它针对传统的无人机与rov结合的检测系统在工作过程中所出现的问题,设计出一种特殊的结构,它除了具有与传统结构相同的固定笼、线缆收放等机构之外,还配置有一个能够夹持并固定rov机器人的夹爪,配合以与rov机器人相配的定位机构,能够实现rov机器人的快速、稳固地定位和夹紧操作,这样一方面在飞行过程中,rov机器人与无人机之间不会发生相对运动,可有效保护rov机器人,提高其使用寿命以及可靠性;另一方面rov与无人机结合为一体结构后,rov便可以带动无人机实现短途的水面航行,从而简化转移的步骤和流程,提高工作效率。并且该检测系统的制作工艺简单,制造成本低廉,因此可以说它具备了多种优点,特别适合于在本领域中推广应用,其市场前景十分广阔。
技术特征:1.一种基于无人机的水下rov检测系统,包括无人机(1)和rov机器人(2),其特征在于:所述无人机(1)的螺旋桨支杆(3)上连接有多个在圆周方向上均匀分布的固定套(4),所有的固定套(4)共同支撑救生圈,无人机(1)的下方设置有连接板(5),连接板(5)的两端设置有固定笼驱动机构(6),所述固定笼驱动机构(6)上连接有固定笼,所述的固定笼由左固定笼(7)和右固定笼(8)两部分组成,这两部分均通过固定笼驱动机构(6)进行驱动,在连接板(5)底端面的中心处还设置有线缆收放机构(9),所述连接板(5)的底端面上还设置有固定夹爪(10),在rov机器人的顶部设置有与所述固定夹爪(10)相匹配的连接架(11),
2.根据权利要求1所述的基于无人机的水下rov检测系统,其特征在于:所述线缆收放机构(9)包括设置在连接板(5)底端面上的支撑座(14),支撑座(14)上转动支撑有转轴,所述转轴通过收放电机进行驱动,同时所述转轴上缠绕线缆,线缆的一端与转轴固定连接,另一端与rov机器人固定连接。
3.根据权利要求1所述的基于无人机的水下rov检测系统,其特征在于:所述固定夹爪(10)包括与连接板(5)固定连接的夹爪支撑架(15),夹爪支撑架(15)的下部转动支撑有两个对称分布的夹爪体(16),夹爪体(16)的内侧设置有弧形齿(17),两个夹爪体(16)上的弧形齿(17)相互啮合,在夹爪支撑架(15)上还转动连接有夹爪驱动缸(18),所述夹爪驱动缸(18)的工作端与一个夹爪体(16)的顶端转动连接,在夹爪支撑架(15)的前后两侧还均连接有导向架(19),所述导向架(19)整体呈人字形,
4.根据权利要求1所述的基于无人机的水下rov检测系统,其特征在于:所述定位机构(13)包括直接与定位架固定连接的固定板(20),固定板(20)上连接有弹性杆(21),弹性杆(21)的末端设置有多个在圆周方向上均匀分布的弹性支杆(22),所述弹性支杆(22)的端部连接有盾形定位片(23),所有的盾形定位片(23)共同合围形成圆锥状的定位件,所述定位件与rov机器人(2)端部的定位孔相匹配。
技术总结本技术公开一种基于无人机的水下ROV检测系统,包括无人机(1)和ROV机器人(2),其特征在于:所述无人机(1)的螺旋桨支杆(3)上连接有多个在圆周方向上均匀分布的固定套(4),所有的固定套(4)共同支撑救生圈,无人机(1)的下方设置有连接板(5),连接板(5)的两端设置有固定笼驱动机构(6),所述固定笼驱动机构(6),所述的固定笼由左固定笼(7)和右固定笼(8)两部分组成,这两部分均通过固定笼驱动机构(6)进行驱动,在连接板(5)底端面的中心处还设置有线缆收放机构(9),所述连接板(5)的底端面上还设置有固定夹爪(10),在ROV机器人的顶部设置有与所述固定夹爪(10)相匹配的连接架(11)。技术研发人员:张迪,印长坤,宋若冰,武立波,何宽雨,苏亚峰,孙远博,刘启显,宁兆研,马思园受保护的技术使用者:大连海洋大学技术研发日:20231212技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/223067.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。