在飞行的爬升阶段期间操作飞机的系统、方法及存储介质与流程
- 国知局
- 2024-08-01 06:16:24
本公开的实施例总体上涉及用于在飞行的爬升阶段期间操作飞机的系统和方法。
背景技术:
1、飞机被用来在各种位置之间运输乘客和货物。许多飞机每天离开并到达典型的机场。
2、发生飞机的飞行的各个阶段。例如,飞机的飞行的阶段包括地面、爬升、巡航和下降。出于各种目的,国际民用航空组织(icao)和国际航空运输协会(iata)定义典型飞行的阶段。
3、飞行的爬升阶段在起飞阶段与爬升顶部之间,这是飞行的巡航阶段的开始。商用飞机飞行的爬升阶段通常在燃料消耗方面很苛刻,因为需要能量来获得高度和速度两者。相反,飞机通常在巡航条件下更有效地操作。因此,当飞机朝向巡航高度爬升时,飞机可能不会关于燃料效率最佳地操作。
4、目前,大多数商用飞机在爬升阶段期间以固定空速飞行,从而导致燃料燃烧和成本增加。这种速度通常基于一般类别的飞机来确定。例如,表示一整类或一整队飞机的测试飞机可以用于确定爬升期间的固定速度。然而,每个飞机在构造、飞行和维持的方式方面在一定程度上是不同的。因此,基于单个测试飞机确定爬升阶段的属性通常不考虑与稍后使用的特定飞机相关的各种因素。此外,飞机可以利用空气动力表面进行改装,但是基于先前测试飞机的速度映射没有被更新,这进一步加宽了现实与所感知的飞行成本之间的间隙。
技术实现思路
1、存在对用于在飞行的爬升阶段期间有效地操作飞机的系统和方法的需求。考虑到该需求,本公开的某些实施例提供了用于在飞行的爬升阶段期间操作飞机的系统。该系统包括控制单元,该控制单元被配置为从飞机的一个或多个传感器接收关于飞机的当前飞行和一个或多个先前飞行中的一者或两者的数据。控制单元还被配置为基于数据确定飞机的有效爬升阶段参数。飞机根据爬升阶段参数在当前飞行和一个或多个未来飞行中的一者或两者的爬升阶段期间操作。
2、在至少一个实施例中,该系统还包括一个或多个传感器。作为实施例,一个或多个传感器包括一个或多个飞行记录器。作为另一或另外的实施例,一个或多个传感器还包括一个或多个速度传感器、一个或多个高度传感器、一个或多个位置传感器、一个或多个环境传感器和一个或多个重量传感器中的一个或多个。
3、在至少一个实施例中,控制单元在飞机上。
4、在至少一个实施例中,控制单元被配置为基于从飞机的一个或多个先前飞行接收的数据确定飞机的未来飞行的有效爬升阶段参数。
5、在至少一个实施例中,控制单元被配置为通过基于数据为飞机生成一个或多个爬升阶段神经网络模型来确定有效爬升阶段属性。
6、控制单元还可以被配置为在飞机的驾驶舱内的监视器上显示有效爬升阶段属性。
7、在至少一个实施例中,控制单元被配置为通过从多个成本指数中确定最低成本指数来确定有效爬升阶段属性。
8、在至少一个实施例中,控制单元还被配置为根据有效爬升阶段参数在爬升阶段期间自动地操作飞机的控件。
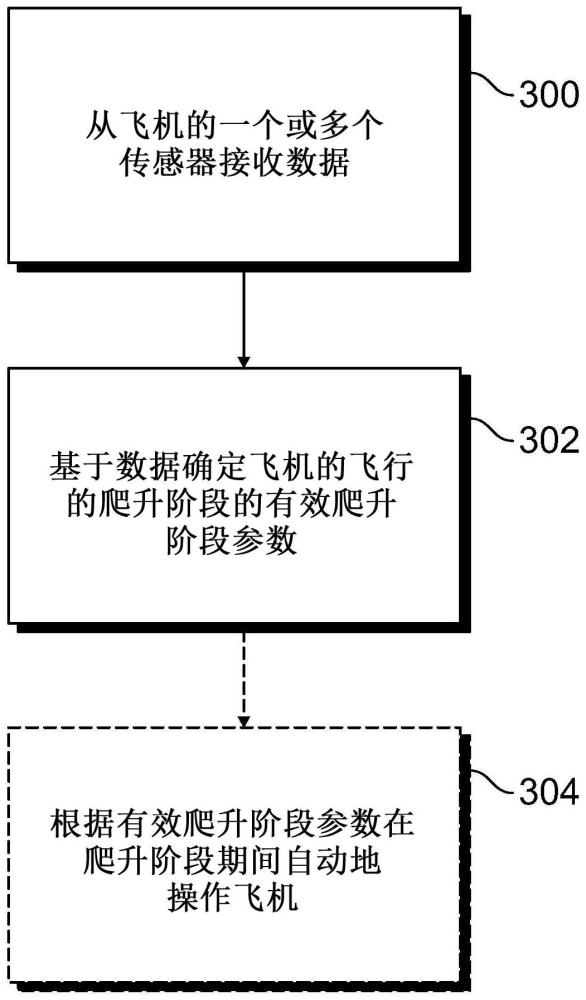
9、本公开的某些实施例提供了一种用于在飞行的爬升阶段期间操作飞机的方法。该方法包括通过控制单元从飞机的一个或多个传感器接收关于飞机的当前飞行和一个或多个先前飞行中的一者或两者的数据;以及通过控制单元基于数据确定飞机的有效爬升阶段参数,其中,飞机根据有效爬升阶段参数在当前飞行和一个或多个未来飞行中的一者或两者的爬升阶段期间操作。
10、本公开的某些实施例提供了一种包括可执行指令的非暂时性计算机可读存储介质,该可执行指令响应于执行而使包括处理器的一个或多个控制单元执行操作,该操作包括:从飞机的一个或多个传感器接收关于飞机的当前飞行和一个或多个先前飞行中的一者或两者的数据;以及基于数据确定飞机的有效爬升阶段参数,其中,飞机根据有效爬升阶段参数在当前飞行和一个或多个未来飞行中的一者或两者的爬升阶段期间操作。
技术特征:1.一种用于在飞行的爬升阶段期间操作飞机(102)的系统(100),所述系统(100)包括:
2.根据权利要求1所述的系统(100),还包括所述一个或多个传感器(106)。
3.根据权利要求2所述的系统(100),其中,所述一个或多个传感器(106)包括一个或多个飞行记录器(106a)。
4.根据权利要求3所述的系统(100),其中,所述一个或多个传感器(106)还包括一个或多个速度传感器、一个或多个高度传感器、一个或多个位置传感器、一个或多个环境传感器(106e)和一个或多个重量传感器(106f)中的一个或多个。
5.根据权利要求1所述的系统(100),其中,所述控制单元(110)在所述飞机(102)上。
6.根据权利要求1所述的系统(100),其中,所述控制单元(110)被配置为基于从所述飞机(102)的所述一个或多个先前飞行接收的所述数据(108)确定所述飞机(102)的未来飞行的所述有效爬升阶段参数。
7.根据权利要求1所述的系统(100),其中,所述控制单元(110)被配置为通过基于所述数据(108))为所述飞机(102)生成一个或多个爬升阶段神经网络模型来确定有效爬升阶段属性。
8.根据权利要求1所述的系统(100),其中,所述控制单元(110)还被配置为在所述飞机(102)的驾驶舱内的监视器(114)上显示有效爬升阶段属性。
9.根据权利要求1所述的系统(100),其中,所述控制单元(110)被配置为通过从多个成本指数中确定最低成本指数来确定有效爬升阶段属性。
10.根据权利要求1所述的系统(100),其中,所述控制单元(110)还被配置为根据所述有效爬升阶段参数在所述爬升阶段期间自动地操作所述飞机(102)的控件(104)。
11.一种用于在飞行的爬升阶段期间操作飞机(102)的方法,所述方法包括:
12.根据权利要求11所述的方法,其中,所述一个或多个传感器(106)包括一个或多个飞行记录器(106a)。
13.根据权利要求12所述的方法,其中,所述一个或多个传感器(106)还包括一个或多个速度传感器、一个或多个高度传感器、一个或多个位置传感器、一个或多个环境传感器(106e)和一个或多个重量传感器(106f)中的一个或多个。
14.根据权利要求11所述的方法,还包括:将所述控制单元(110)设置在所述飞机(102)上。
15.根据权利要求11所述的方法,其中,所述确定包括:基于从所述飞机(102)的所述一个或多个先前飞行接收的数据(108)确定所述飞机(102)的未来飞行的所述有效爬升阶段参数。
16.根据权利要求11所述的方法,其中,所述确定包括:通过基于所述数据(108)为所述飞机(102)生成一个或多个爬升阶段神经网络模型来确定有效爬升阶段属性。
17.根据权利要求11所述的方法,还包括:通过所述控制单元(110)在所述飞机(102)的驾驶舱内的监视器(114)上显示有效爬升阶段属性。
18.根据权利要求11所述的方法,其中,所述确定包括:通过从多个成本指数中确定最低成本指数来确定有效爬升阶段属性。
19.根据权利要求11所述的方法,还包括:通过所述控制单元(110)根据所述有效爬升阶段参数在所述爬升阶段期间自动地操作所述飞机(102)的控件(104)。
20.一种包括可执行指令的非暂时性计算机可读存储介质,所述可执行指令响应于执行而使包括处理器的一个或多个控制单元(110)执行操作,所述操作包括:
技术总结一种在飞行的爬升阶段期间操作飞机的系统、方法及存储介质,包括被配置为从飞机(102)的一个或多个传感器(106)接收关于飞机(102)的当前飞行和一个或多个先前飞行中的一者或两者的数据(108)的控制单元(110)。控制单元(110)还被配置为基于数据(108)确定飞机(102)的有效爬升阶段参数。飞机(102)根据该有效爬升阶段参数在当前飞行和一个或多个未来飞行中的一者或两者的爬升阶段期间操作。技术研发人员:柴塔尼亚·帕万·库马尔·阿里皮拉拉,维瑞什·库马尔·马萨鲁·那拉辛胡鲁,约斯特·E·科恩,詹姆斯·R·汉密尔顿,J·L·泰利受保护的技术使用者:波音公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/223066.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表