-
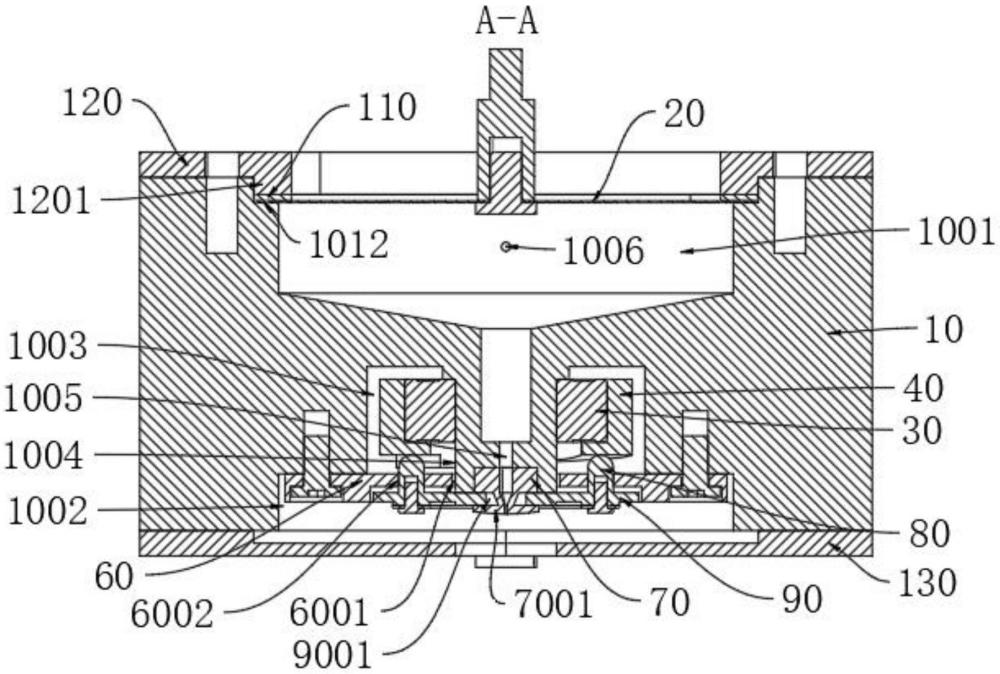
一种喷口可变径喷头及柔顺压电微喷装置的制作方法
本发明属压电微喷,特别是涉及一种喷口可变径喷头及柔顺压电微喷装置。背景技术:1、近年来,随着数字媒体的井喷式发展和科学技术领域对于微细领域的探索,压电式微喷装置的应用领域逐步扩大到个性化喷墨印刷、生物......
-
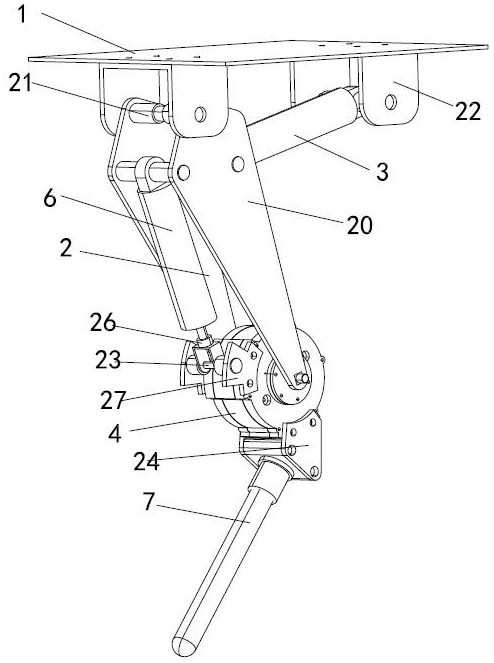
一种基于磁流变柔顺装置的机械腿结构及其控制方法
本发明磁流变阻尼器,特别涉及一种基于磁流变柔顺装置的机械腿结构及其控制方法。背景技术:1、液压驱动的足式机器人具有较大的承载能力,同时液压驱动系统具有更高的功率密度比,良好的稳定性能以及动作反应迅速等......
-

一种柔顺防扭转空间三级位移放大机构
本发明涉及柔顺机构,具体为一种柔顺防扭转空间三级位移放大机构。背景技术:1、与传统的刚性机构不同,柔顺机构通过弹性变形实现力和能量的传递,以此实现部分或全部运动。由于柔顺机构没有刚性运动副,这使得柔顺......
-
柔顺控制型水下压力容器在役检修机器人系统及方法
本发明属于检修机器人,尤其涉及一种柔顺控制型水下压力容器在役检修机器人系统。背景技术:1、水下压力容器在役检修机器人是一种专门用于水下压力容器的在役检修工作的机器人。这种机器人结合了水下机器人技术、压......
-
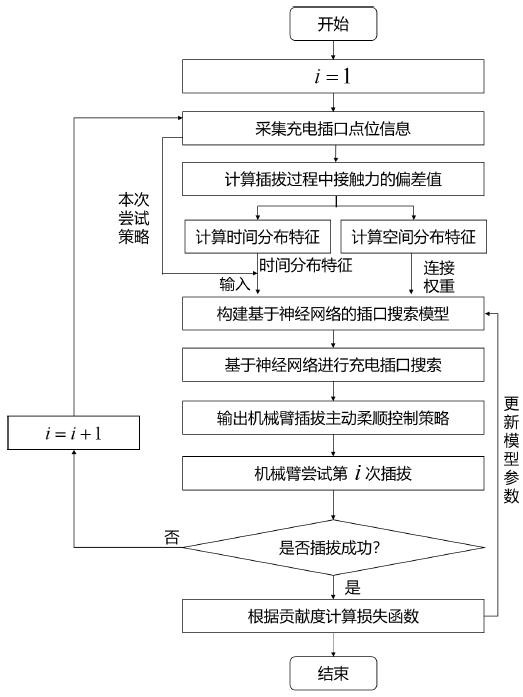
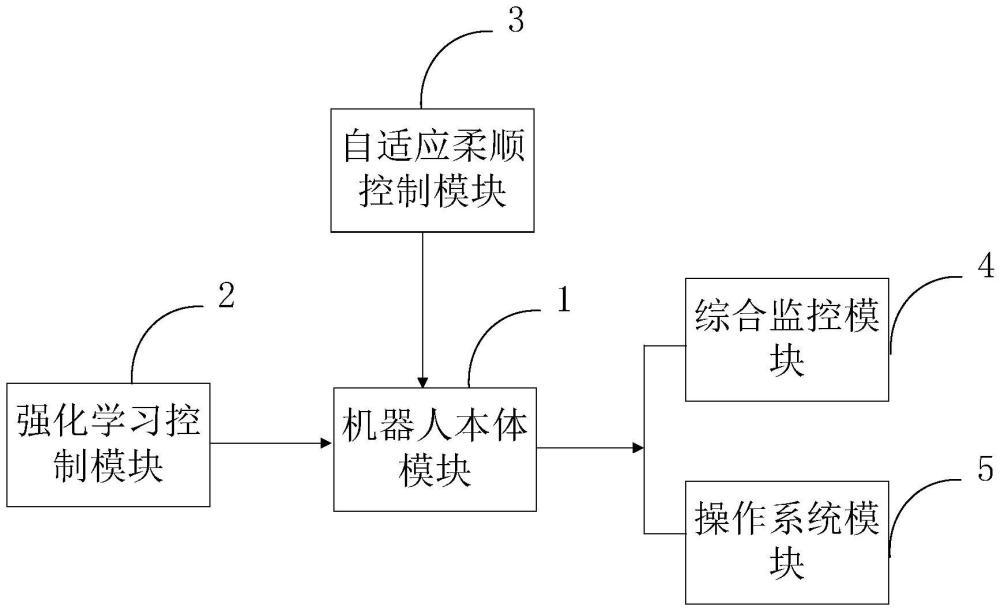
基于时空特征融合的机械臂充电插拔主动柔顺控制方法与流程
本发明属于充电桩,具体涉及基于时空特征融合的机械臂充电插拔主动柔顺控制方法。背景技术:1、随着新能源汽车战略的大力推广,电动汽车的普及为智能电网带来新的发展机遇。随着智能驾驶和快充技术的进步,自动化充......
-

一种用于船舶分段柔顺对接的协同调姿装置
本发明涉及一种用于船舶分段柔顺对接的协同调姿装置,属于船舶分段对接。背景技术:1、在船舶制造业中,船舶分段的对接装配是一个关键环节,对接技术水平的高低很大程度上决定了提高船舶的整体建造质量和效率。然而......
-
一种具有六自由度的被动柔顺对接辅助装置
本申请涉及航天模块对接,更具体地说,是一种具有六自由度的被动柔顺对接辅助装置。背景技术:1、低温液体推进剂具有易燃、易挥发且易爆的特性,为降低推进剂加注过程中的安全隐患,自动化的火箭推进剂加注系统已成......
-
基于仿生柔顺机构的视觉拍摄装置及飞行拍摄系统
本发明涉及机器视觉,更具体地,涉及一种基于仿生柔顺机构的视觉拍摄装置及飞行拍摄系统。背景技术:1、机器视觉是指配置视觉测量或传感的检测技术,目的是让机器测量、识别或跟踪环境中的特定对象,在自动化生产中......
-
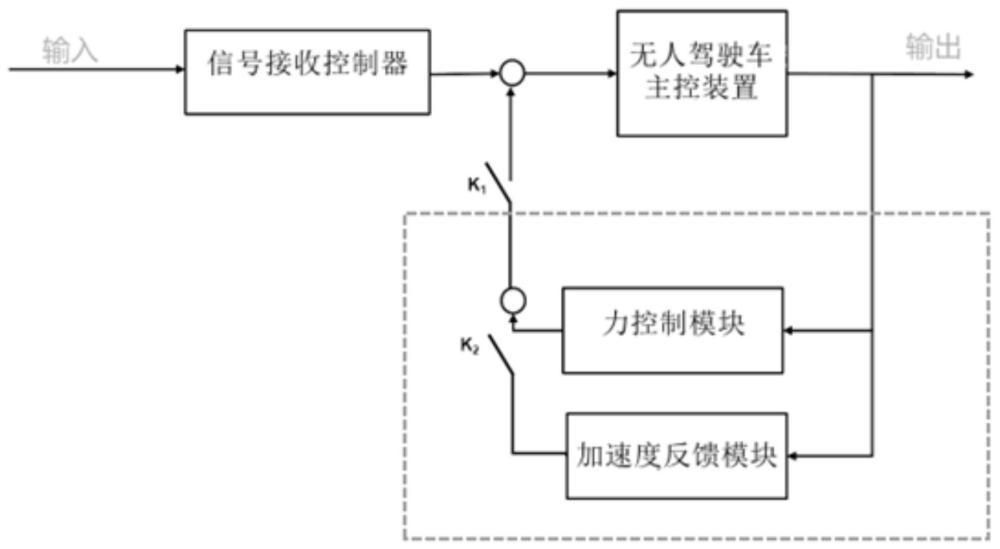
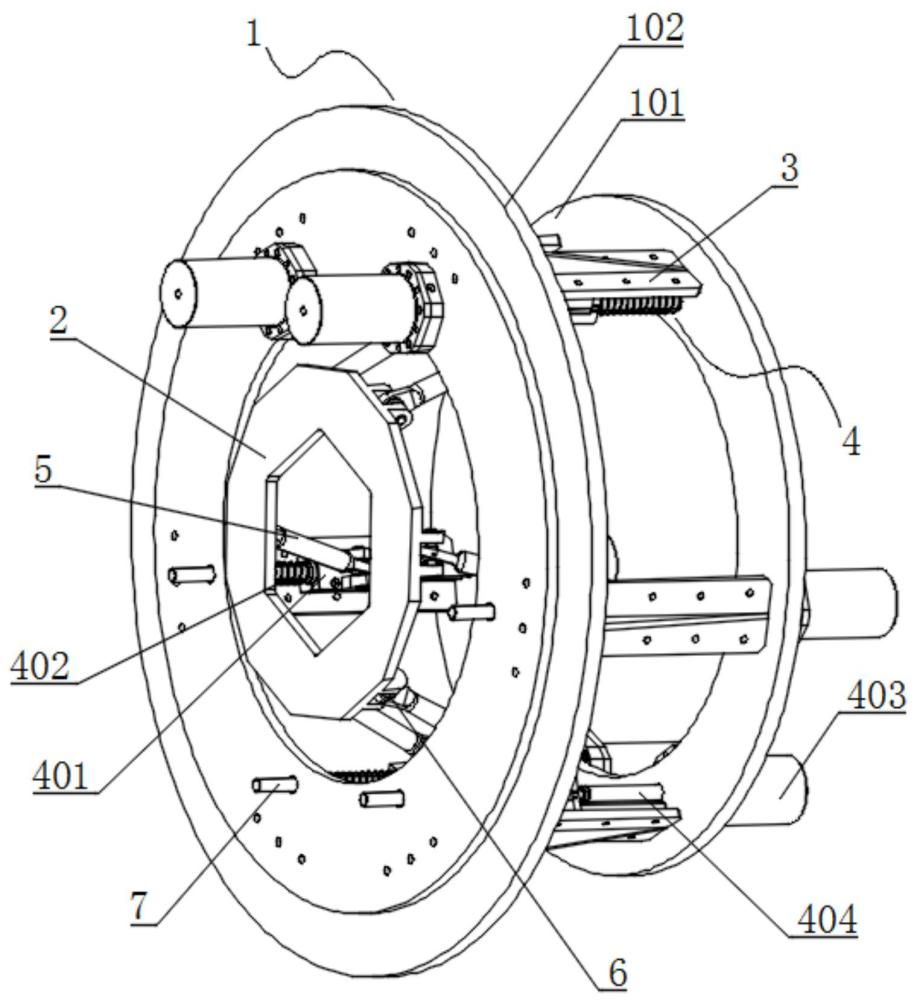
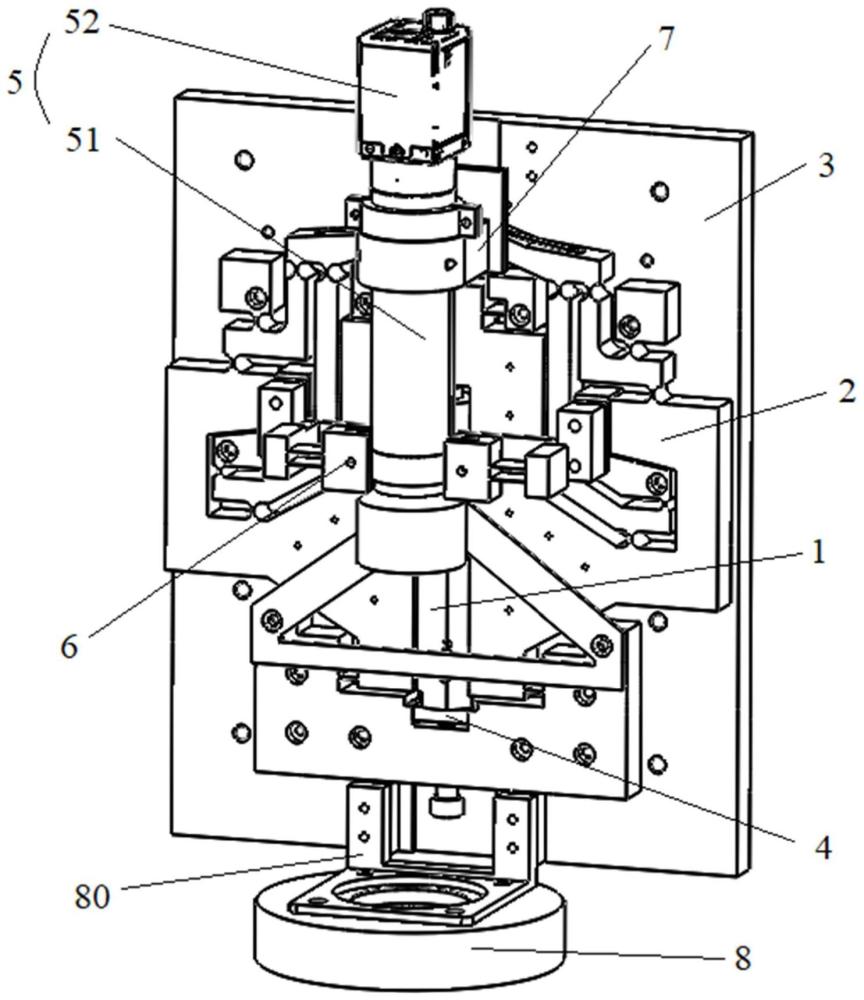
机场无人驾驶车柔顺对接控制方法、系统、设备及介质与流程
本发明涉及机场设备智能控制,具体而言,涉及机场无人驾驶车柔顺对接控制方法、系统、设备及介质。背景技术:1、航空食品车作业流程极为复杂且细致:首先,食品车需从指定的食品存放区装载所需食品,随后经过机场道......
-
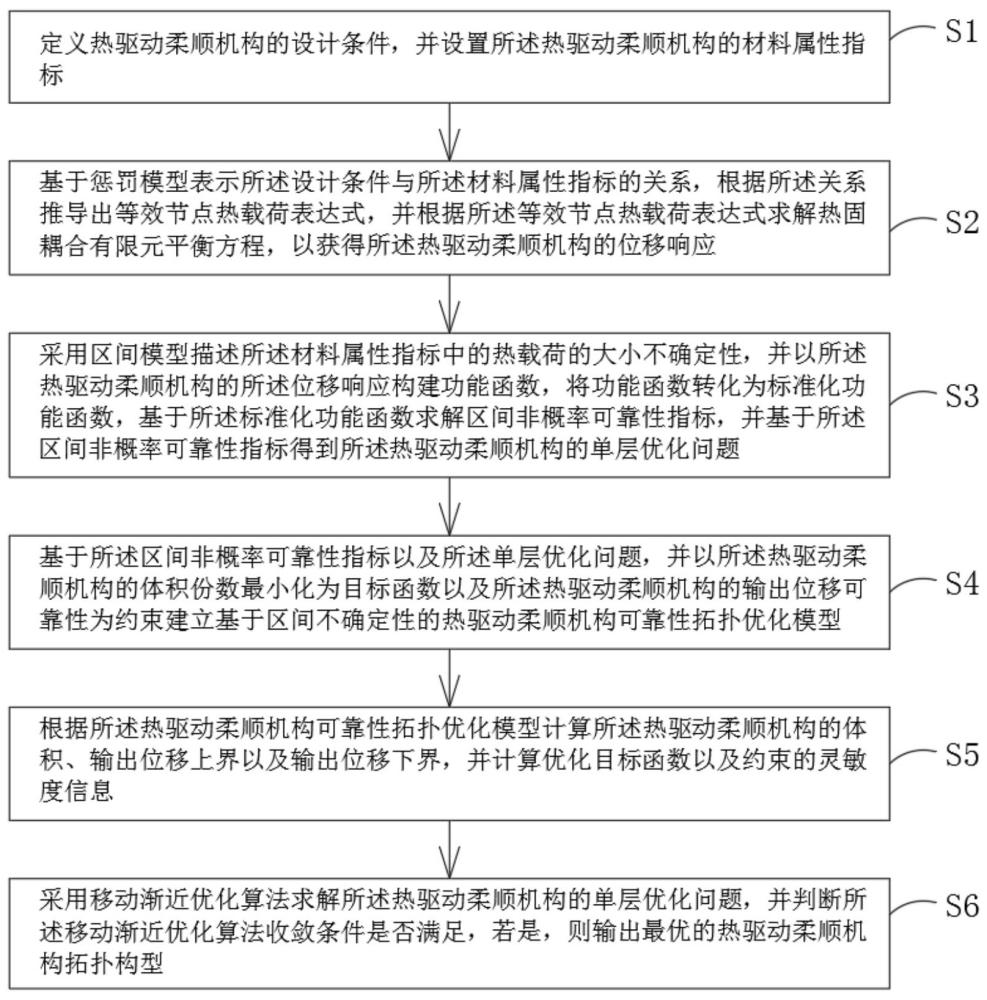
考虑区间不确定性的热驱动柔顺机构可靠性拓扑优化方法
本发明涉及柔顺机构优化设计,特别涉及一种考虑区间不确定性的热驱动柔顺机构可靠性拓扑优化方法。背景技术:1、柔顺机构是一种利用自身的弹性变形来实现运动、力和能量的传递和转化的机构,具有高精度、无摩擦磨损......
-
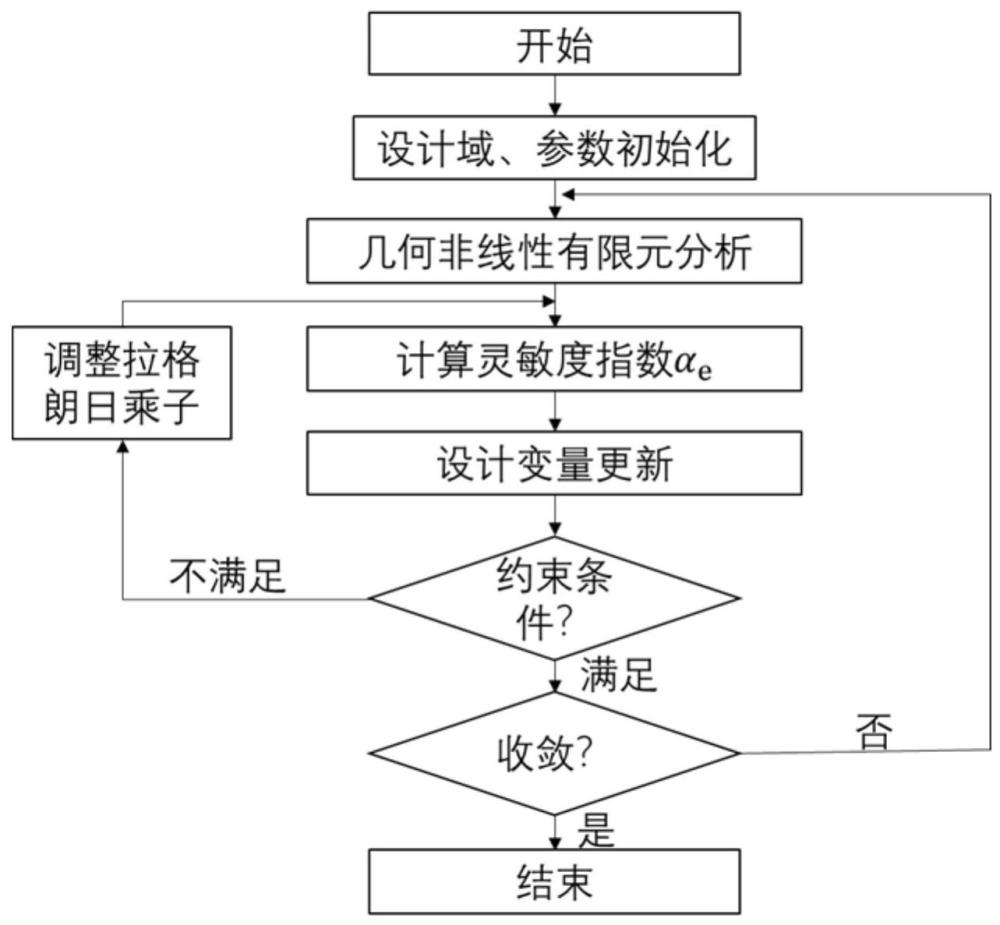
一种考虑几何非线性的无铰链柔顺机构的拓扑优化设计方法
本发明属于结构优化相关,更具体地,涉及一种考虑几何非线性的无铰链柔顺机构的拓扑优化设计方法。背景技术:1、柔性机构是一种以整体结构的弹性变形为手段,将运动、力或者能量传递或者转换到输出端的新型机构。由......
-

空间机器人柔顺操控半实物仿真及模拟系统及方法
本发明属于空间机器人,具体涉及一种空间机器人柔顺操控半实物仿真及模拟系统及方法。背景技术:::1、空间机器人能够取代航天员承担空间站建设与运营、在轨维修维护、太空垃圾清理等核心操作任务,目前已成为各个......
-
柔顺抗静电真丝面料及其制备方法与流程
本申请涉及纺织品,具体涉及柔顺抗静电真丝面料及其制备方法。背景技术:1、真丝面料,是相对于仿真丝绸面料而言的,一般指蚕丝,包括桑蚕丝、柞蚕丝、蓖麻蚕丝、木薯蚕丝等,它广泛用于服饰、家具中,以舒适透气闻......
-
一种领结变化双层柔顺纱布的制作方法
本技术属于家用纺织品面料领域,尤其涉及一种领结变化双层柔顺纱布。背景技术:1、普通纱布面料一般采用平纹、斜纹或缎纹等三原组织织造的单层纱布结构,常用的材质包括纯棉、涤棉及其他混纺纤维。然而,这种单层结......
-
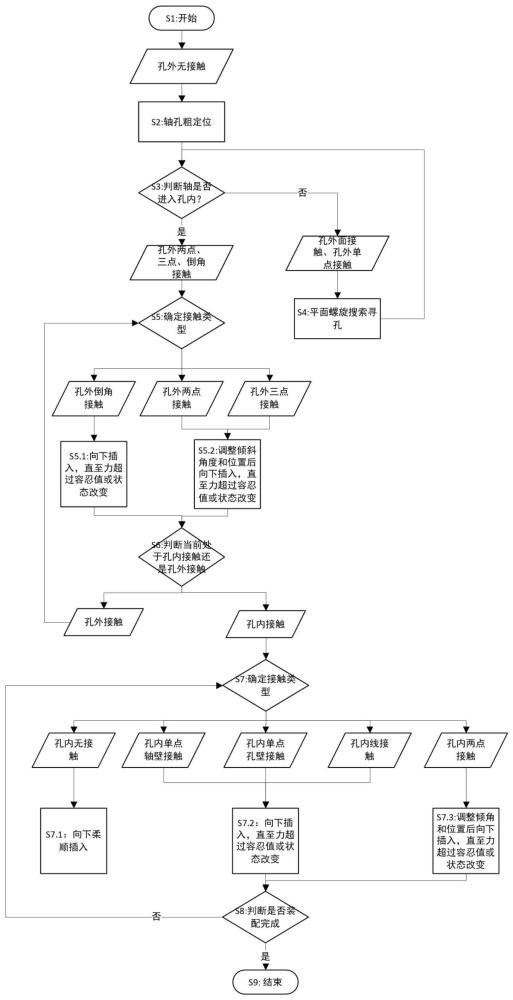
一种核电维修机器人自适应柔顺装配控制方法与流程
本发明涉及核电维修,尤其涉及一种核电维修机器人自适应柔顺装配控制方法。背景技术:1、在核电维修场景中,小到螺栓、螺母自动装拆,水下零部件(销钉、螺钉)自动更换,大到蒸发器主接管封堵,堆内构件吊装、燃料......
-
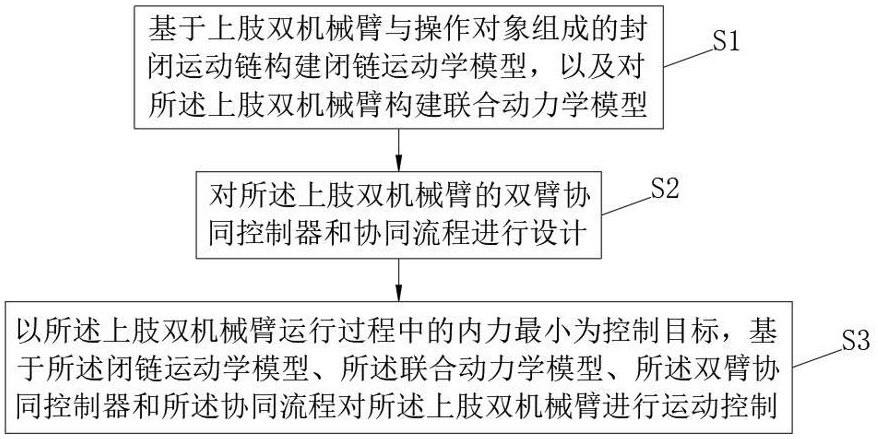
一种人形机器人上肢双机械臂的柔顺控制方法及装置
本发明涉及机械臂控制方法,尤其涉及一种人形机器人上肢双机械臂的柔顺控制方法及装置。背景技术:1、当前绝大多数类型的载具在操纵器的安装设计上依然保留着结实耐用的机械传动机构,并与轮胎保持物理连接。这种做......
-
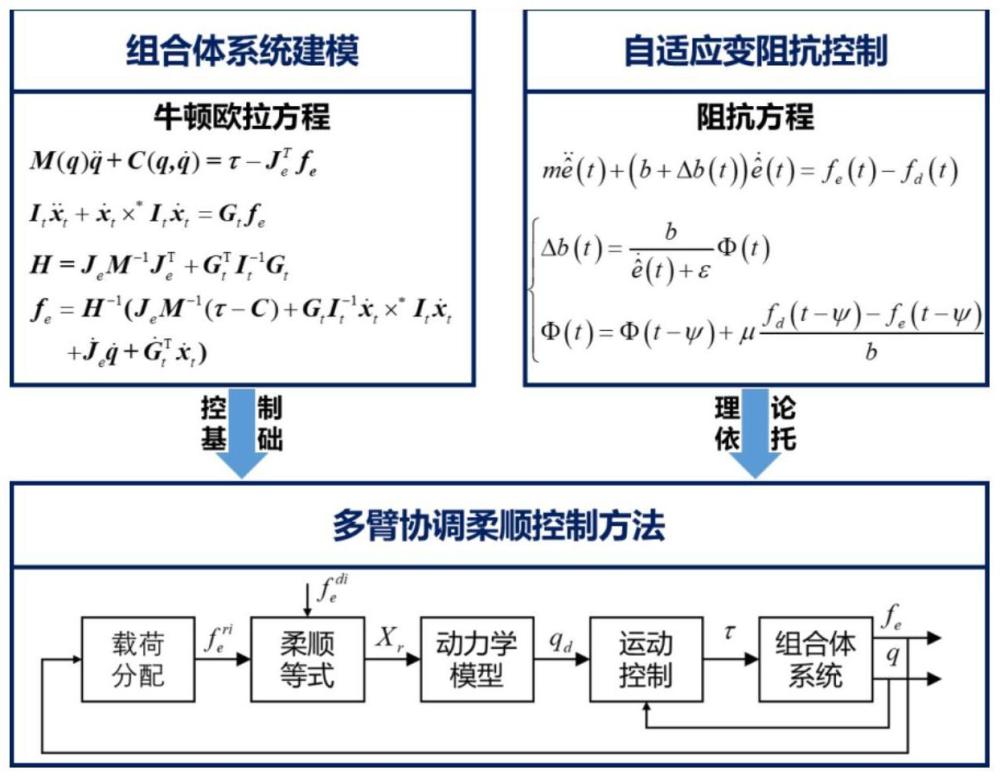
面向空间旋拧操作任务的多臂机器人协调柔顺控制方法
本发明属于空间机器人领域,涉及一种空间旋拧操作的多臂机器人协调柔顺控制方法,具体来说是一种基于对称式自适应变阻抗的多臂机器人协调柔顺控制方法。背景技术:1、在各国的航天发展与空间应用规划中,空间机器人......
-
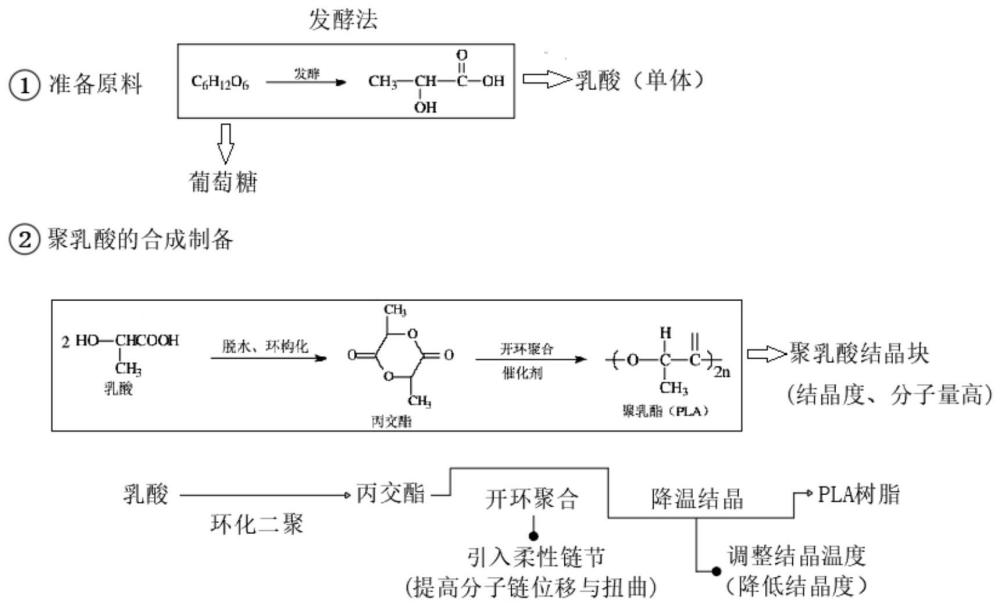
一种高柔顺性聚乳酸纤维的制备方法与流程
本发明涉及聚乳酸纤维制备,尤其涉及一种高柔顺性聚乳酸纤维的制备方法。背景技术:1、聚乳酸纤维是一种生物可降解的合成纤维,由聚乳酸(pla)制成,它具有优异的物理性能,是一种具有广泛应用前景的新型生物材......
-
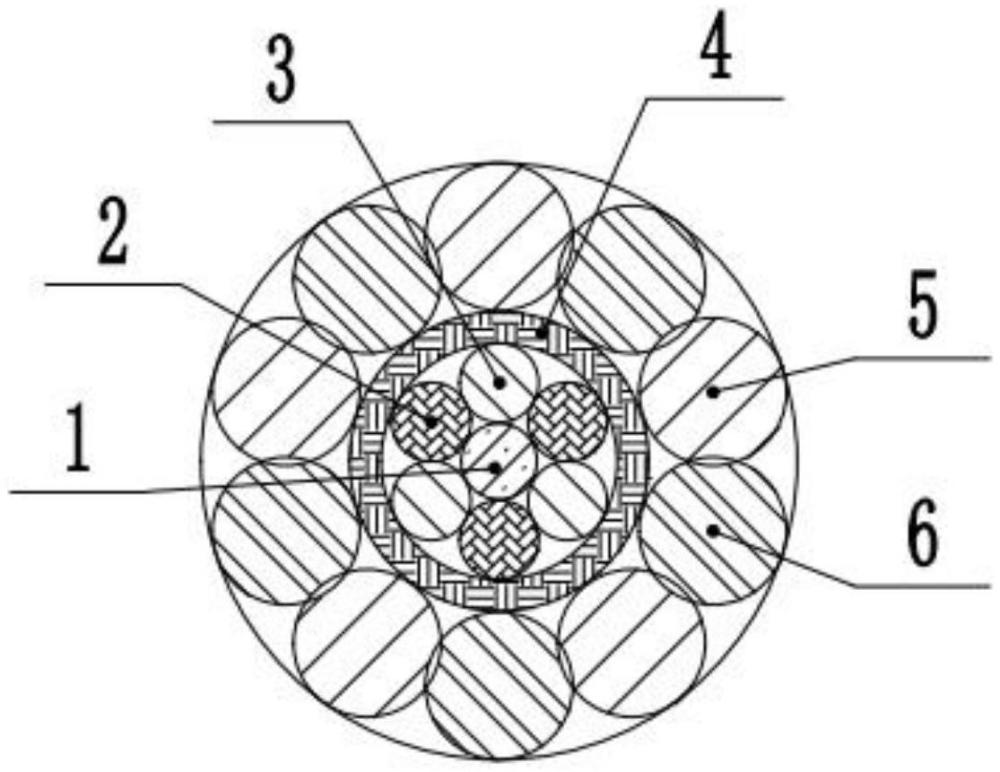
一种柔顺抗紫外线涤纶纱线的制作方法
本技术涉及涤纶纱线领域,具体涉及一种柔顺抗紫外线涤纶纱线。背景技术:1、涤纶纱线是由涤纶纤维制成的纱线,涤纶纤维是一种合成纤维,也被称为聚酯纤维,它通过聚酯原料经过纺丝和加工工艺制成,涤纶纱线广泛应用......
技术新讯 > 柔顺 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -
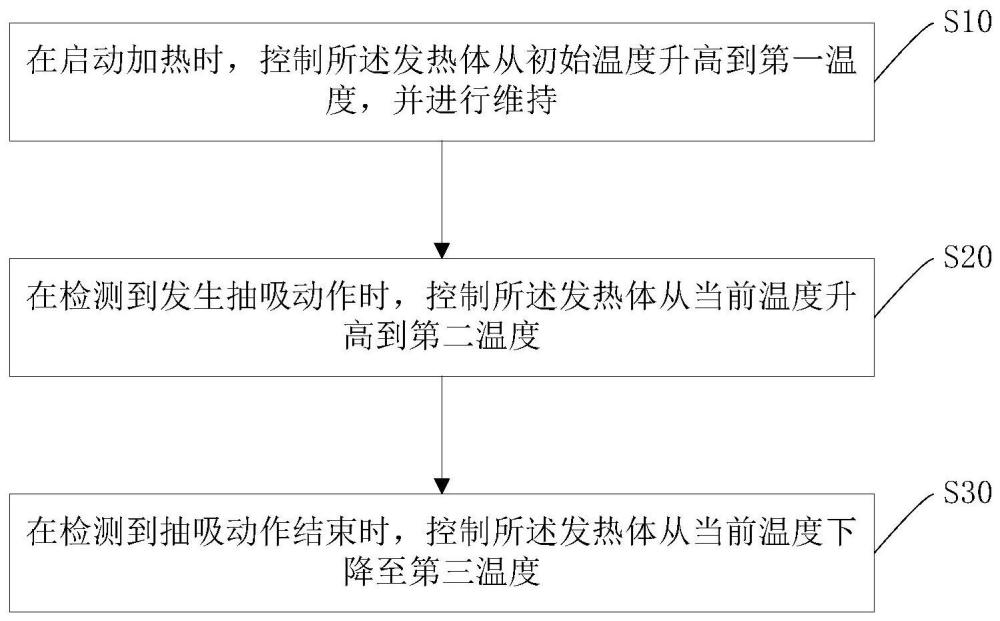
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01